
Leszek Chodor, 7 kwietnia 2019
2019-05-26 – z podręcznika wydzielono rozdział i opublikowano w internecie oraz zaopatrzono w połączenia, odnośnikami z innymi rozdziałami
2019-06-22 – dodano rozdział dotyczące kryteriów stateczności oraz wrażliwości na efekty II rzędu i imperfekcje
2020-12-07) – dodano rozdział dotyczący imperfekcji krytycznych oraz rozdział „Stochastyczny model mnożnika obciążenia
2026-06-04) – odzyskano po poważnej awarii portalu. Zmieniono redakcję z uwględnieniem informacji już zdefinowanych w artykule Niezawodność konstrukcji”
W przypadku nieczytelnych treści, proszę powiadomić: leszek@chodor.co
W ciągu ostatnich 24 godzin z artykułu korzystało 39 Czytelników
Wstęp do podręcznika
Wszystkie konstrukcje rzeczywiste są obarczone imperfekcjami geometrycznymi, materiałowymi i technologicznymi. Nie istnieją konstrukcje idealnie proste, idealnie osiowe ani wykonane bez odchyłek montażowych i wykonawczych. Imperfekcje te wpływają na sztywność, stateczność i nośność konstrukcji, a w wielu przypadkach decydują o sposobie jej zniszczenia.
Stateczność konstrukcji należy do najtrudniejszych zagadnień współczesnej mechaniki budowli. Pomimo ponad stuletniego rozwoju teorii wyboczenia i zwichrzenia nadal obserwuje się znaczące różnice pomiędzy zachowaniem modeli idealnych a zachowaniem konstrukcji rzeczywistych. Szczególnie widoczne jest to w konstrukcjach smukłych, wrażliwych na efekty drugiego rzędu, imperfekcje geometryczne oraz nieliniowości materiałowe.
Rozwój metod komputerowych umożliwił odejście od wielu klasycznych uproszczeń projektowych i przejście do bezpośredniego modelowania konstrukcji z imperfekcjami. Współczesny projektant coraz częściej wykorzystuje analizy geometrycznie i materiałowo nieliniowe, w których imperfekcje są modelowane wprost, a nie uwzględniane pośrednio za pomocą współczynników redukcyjnych.
Podręcznik przedstawia współczesne podejście do projektowania konstrukcji z wykorzystaniem metod imperfekcyjnych. Obejmuje zarówno podstawy teoretyczne, jak i praktyczne procedury obliczeniowe stosowane w projektowaniu konstrukcji stalowych, żelbetowych, zespolonych, drewnianych, aluminiowych i murowych.
Szczególną uwagę poświęcono związkom pomiędzy imperfekcjami konstrukcyjnymi, utratą stateczności, nośnością graniczną i niezawodnością konstrukcji. Przedstawiono zarówno rozwiązania normowe, jak i autorskie rozwinięcia metod imperfekcyjnych, wynikające z wieloletnich doświadczeń projektowych oraz badań naukowych autora. a także z obserwacji rzeczywistych obiektów budowlanych zaprojektowanych bezpośrednią metodą imperfekcyjną.
Cel i zakres podręcznika
Celem podrecznika jest przedstawienie spójnej metodologii projektowania konstrukcji rzeczywistych, uwzględniającej zarówno wymagania współczesnych norm, jak i możliwości współczesnych programów obliczeniowych.
Podręcznik poświęcono współczesnym metodom imperfekcyjnym projektowania konstrukcji Przedstawiono genezę tych metod, ich podstawy teoretyczne, współczesne rozwiązania normowe oraz praktyczne procedury obliczeniowe stosowane w analizie konstrukcji rzeczywistych. Szczególną uwagę poświęcono bezpośrednim metodom imperfekcyjnym wykorzystującym analizę geometrycznie nieliniową konstrukcji oraz ich związkom z klasycznymi metodami wyboczeniowymi. Omówiono zarówno imperfekcje globalne, jak i lokalne, ich źródła, modele obliczeniowe oraz związki z tolerancjami wykonawczymi.
W podręczniku przedstawiono autorską uogólnioną metodę imperfekcyjną stanowiącą rozwinięcie klasycznej alternatywnej metody imperfekcyjnej. W metodzie tej imperfekcje interpretowane są jako nośniki informacji o możliwych formach utraty stateczności konstrukcji, a analiza stateczności zostaje powiązana z analizą nośności granicznej i niezawodności konstrukcji. Istotnym elementem podręcznika jest probabilistyczny opis imperfekcji oraz mechanizmów zniszczenia konstrukcji. Szczegółowe podstawy teorii niezawodności, teorii wartości ekstremalnych oraz metod probabilistycznych przedstawiono w odrębnym opracowaniu „Niezawodność konstrukcji”. W niniejszym podręczniku wykorzystano te wyniki wyłącznie w zakresie niezbędnym do opisu imperfekcji i stateczności konstrukcji.
Zaprezentowano podstawy metody imperfekcyjnej w odmianach geometrycznych i alternatywnych imperfekcji oraz równoważnych, fikcyjnych obciążeń. Na podstawie wieloletniej praktyki projektowej oraz wielu symulacji numerycznych. przedstawiono praktyczny algorytm inżynierski obliczania i projektowania rzeczywistych konstrukcji obarczonych imperfekcjami z uwzględnieniem nieliniowych efektów geometrycznych oraz wielorakich form niestateczności prętów: wyboczenia giętnego, skrętnego, i bocznego – zwichrzenia.
Zamieszczono liczne przykłady rachunkow dla szeregu rodzajów konstrukcji. Przykłady wykonano współczesnym programem obliczeniowym Consteel [1] o siedmiu stopniach swobody (z paczeniem i bimomentem jako dodatkowym przemieszczeniem i siłą przekrojową).
Prezentowany w konkluzji podręcznika algorytm jest uogólnieniem alternatywnej, imperfekcyjnej metody geometrycznej wdrożonej przez [2] i szczegółowo przedstawionej w pracy [3] oraz kolejnych. Alternatywna metoda imperfekcyjna jest zalecana do stosowania przez współczesne normy do projektowania konstrukcji w tym [4], a polega na założeniu kształtu imperfekcji w formie przeskalowanej, pierwszej sprężystej postaci wyboczenia. Taka zintegrowana imperfekcja opisuje zarówno imperfekcje łukowe jak i przechyłowe.
Badania nad metodą imperfekcyjną prowadzone w podręczniku zmierzają w kierunku opisu następujących fundamentalnych problemów:
1. Zaprezentowanie metody analizy konstrukcji, umożliwiającej zautomatyzowany proces obliczeń, uwzględniający wielorakie, sprzężone formy utraty stateczności i korelacje między nimi – bez stosowania skomplikowanego systemu normowych współczynników redukcyjnych (wyboczeniowych) przypisanych do wyodrębnianych form utraty stateczności, wraz z systemem współczynników korelacji form wyboczenia wydzielonych elementów,
2. Opisanie imperfekcji kształtem zniszczenia granicznego, wyznaczonym z warunku sprężystej niestateczności oraz zniszczenia plastycznego lub uogólnionych przegubów w konstrukcjach żelbetowych, zespolonych drewnianych i murowych.
3. Opisanie losowego charakteru imperfekcji oraz probabilistycznej reprezentacji alternatywnych postaci utraty stateczności, a także mechanizmów zniszczenia konstrukcji: wyboczenia sprężystego i utworzenia mechanizmu plastycznego.
4. Zdefiniowanie klas wrażliwości konstrukcji i elementów konstrukcyjnych na lokalne (łukowe) imperfekcje geometryczne, których uwzględnienie w modelu konstrukcji i kombinacjach jest utrudnione.
Do rozwiązania postawionych zagadnień uogólniono imperfekcyjną metodę alternatywną poprzez wyznaczenie strzałki imperfekcji sprężysto-plastycznych. Prezentowane uogólnienie polega na ogarnięciu tą metodą:
1) wszystkich form utraty stateczności, możliwych do ujawnienia w numerycznym modelu konstrukcji,
2) traktowaniu imperfekcji, jako „losowej sumy” imperfekcji przeskalowanej z postaci sprężystej utraty stateczności systemu oraz stowarzyszonej z postacią utraty nośności plastycznej. Losowe imperfekcje opisano rozkładem Gumbela maksimów, a alternatywę typów imperfekcji oraz mechanizmów zniszczenia potraktowano, jako losowe zdarzenie łączne niezależnych losowo zdarzeń brzegowych.
W prezentowanej metodzie – sprężystej postaci utraty stateczności systemu – nie traktuje się jako ortodoksyjnego wzorca zintegrowanych (łącznie globalnych -przechyłowych i lokalnych- łukowych ) imperfekcji systemu. W to miejsce wprowadza się podejście sprężysto-plastyczne i dodatkowo „rozmyte” na skutek losowego charakteru tych zjawisk, to znaczy podejście rzeczywiste, generalnie prowadzące do zwiększenia nośności systemu, ale w szczególnych przypadkach ujawniające niedobory nośności w stosunku do metod dotychczas stosowanych.
Metodę imperfekcyjną projektowania konstrukcji przedstawiono na przykładzie prętowych konstrukcji stalowych, żelbetowych, zespolonych, drewnianych i murowych. Nie analizowano konstrukcji powłokowych [5] , płytowych [6] , blachownic [7] i innych specjalnych. Konstrukcje te powinny być przedmiotem odrębnych monografii, choć ogólne zasady przedstawione w tym podręczniku wymagają tylko drobnych modyfikacji. Rozważono sytuacje, które nie zawierają wpływów pożaru oraz zmęczenia.
W podręczniku przyjęto trzy podstawowe założenia:
- Wszystkie konstrukcje rzeczywiste są obarczone imperfekcjami, dlatego analiza konstrukcji idealnej ma charakter pomocniczy,
- Podstawową metodą projektowania powinny być bezpośrednie metody imperfekcyjne wykorzystujące analizę geometrycznie nieliniową konstrukcji,
- Uniwersalną miarą nośności konstrukcji jest mnożnik obciążenia $\Lambda$, umożliwiający wspólny opis utraty stateczności, nośności plastycznej oraz innych stanów granicznych.
Rozdział I : WPROWADZENIE do imperfekcyjnej metody projektowania konstrukcji
Klasyczne metody wyboczeniowe uwzględniają wpływ imperfekcji pośrednio poprzez system współczynników redukcyjnych wyznaczanych dla wydzielonych elementów konstrukcji. Metody imperfekcyjne opierają się natomiast na bezpośrednim modelowaniu imperfekcji geometrycznych lub równoważnych im oddziaływań, a następnie na przeprowadzeniu geometrycznie nieliniowej analizy całego układu konstrukcyjnego.
Przedstawiona w podręczniku metoda stanowi rozwinięcie klasycznej alternatywnej metody imperfekcyjnej poprzez uwzględnienie wielorakich form utraty stateczności, losowego charakteru imperfekcji oraz sprzężenia efektów statecznościowych i plastycznych.
Podstawową wielkością wykorzystywaną w dalszej części podręcznika jest mnożnik obciążenia
\[ \Lambda =\frac{F_{lim}} {F_E} \tag{I.1} \label {Lambda}\]
opisujący relację pomiędzy konfiguracją obciążenia granicznego $F_{lim}$, prowadzącego do utraty nośności konstrukcji, a konfiguracją obciążenia odniesienia $F_E$.
Mnożnik $\Lambda$ stanowi uniwersalną miarę nośności i bezpieczeństwa konstrukcji. W dalszych rozdziałach pokazano, że różne formy utraty stateczności oraz odpowiadające im imperfekcje mogą być interpretowane jako alternatywne mechanizmy zniszczenia konstrukcji. Takie podejście umożliwia bezpośrednie powiązanie analizy stateczności, nośności granicznej oraz niezawodności konstrukcji w ramach jednolitego modelu obliczeniowego.
Probabilistyczne podstawy tego podejścia, teoria niezawodności konstrukcji, teoria wartości ekstremalnych oraz związki pomiędzy prawdopodobieństwem zniszczenia i wskaźnikiem niezawodności przedstawiono w odrębnym opracowaniu „Niezawodność konstrukcji”. W niniejszym podręczniku skoncentrowano się na zagadnieniach specyficznych dla metod imperfekcyjnych oraz ich zastosowaniach w praktyce projektowej.
Klasyczne metody wykorzystujące współczynniki wyboczeniowe i redukcyjne zachowują znaczenie normowe oraz historyczne, jednak współczesna praktyka projektowa coraz częściej opiera się na bezpośrednich metodach imperfekcyjnych wykorzystujących analizę geometrycznie nieliniową konstrukcji. Rozwój metod numerycznych umożliwił odejście od wielu uproszczeń stosowanych w klasycznych procedurach projektowych i przejście do bezpośredniego modelowania rzeczywistych zachowań konstrukcji.
Przedstawiona metoda stanowi rozwinięcie klasycznej alternatywnej metody imperfekcyjnej poprzez uwzględnienie losowego charakteru imperfekcji, wielorakich form utraty stateczności, alternatywnych mechanizmów zniszczenia oraz sprzężenia efektów statecznościowych i plastycznych. W dalszej części podręcznika pokazano, że wielorakie formy utraty stateczności oraz odpowiadające im imperfekcje mogą być interpretowane jako alternatywne mechanizmy zniszczenia konstrukcji. Podejście to umożliwia połączenie klasycznej analizy stateczności z nowoczesną teorią niezawodności konstrukcji, przy zachowaniu bezpośredniej interpretacji fizycznej i inżynierskiej otrzymywanych wyników.
Część I-1 Pojęcia wstępne
Mnożnik obciążenia miarą nośności konstrukcji
Rozważmy dowolną konstrukcję poddaną dowolnemu zewnętrznemu obciążeniu (siły skupione, rozłożone, termiczne, wymuszenia geometryczne), w konfiguracji $F$.
Obciążenie konstrukcji w rozważanej chwili wynosi $\Lambda \cdot F$, gdzie $\Lambda$ jest mnożnikiem przez który należy przemnożyć każdą skladową konfiguracji $F$.
Mnożnik obciążenia będziemy oznaczać dużą literą $\Lambda$. W normie [4] mnożnik obciążenia jest oznaczany mała literą $\alpha$, a mnożnik obciążenia krytycznego przez $\alpha_{cr} .
Zmieniamy to oznaczenie na dużą literę w celu podkreślenia znaczenia pojęcia i wyróżniania go w tekście. Obie wielkości są tożsame $\Lambda_{cr}=\alpha_{cr}$
Załóżmy, że podczas zwiększania wartości obciążenia, działającego na konstrukcję proporcjonalnie do mnożnika $\Lambda$ – pod obciążeniem $ F_R=Λ_R \cdot F_E$ nastąpi utrata stateczności konstrukcji na skutek przekroczenia dowolnego stanu granicznego, czyli wystąpienia mechanizmów zniszczenia:
\[ M_k= \{ \text{k-ty mechanizm zniszczenia}\}, \qquad k=1,\ldots,N \tag{I-1.1} \label{M_k} \]
gdzie:
\[ M_k \in \left\{ M_{cr}, M_{pl}, M_{brit}, M_{SGU} \right\} \tag{I-1.2} \label{M_k,in} \]
\[ \left\{ M_{cr}, M_{pl}, M_{brit}, M_{SGU} \right\} = \left\{ \begin{array}{l} \text{utrata stateczności},\\ \text{mechanizm plastyczny},\\ \text{zniszczenie kruche lub reologiczne},\\ \text{przekroczenie stanu użytkowalności} \end{array} \right\} \tag{I-1.3} \label{M_k,opis} \]
Mechznim zniszczenia $M_$ noże być natury
\[ M_k= \left\{
\begin{array}{ll}
M_{cr} & \text{utrata stateczności},\\
M_{pl} & \text{mechanizm plastyczny},\\
M_{brit} & \text{zniszczenie kruche lub reologiczne},\\
M_{SGU} & \text{przekroczenie stanu użytkowalności}.
\end{array}
\right. \qquad k=1,\ldots,N \tag{I-1.3a} \label{M_k} \]
z dalszym uszczególowieniem:
$\mathbf{M_1} =M_{cr}$: utracie stateczności konstrukcji w dowolnej formie ( wyboczenie, zwichrzenie, dystorsja , itd), w taki sposób, że będzie to prowadziło do załamania konstrukcji lub jej części. W tym sensie nie jest utratą stateczności miejscowe wyboczenie, jeśli konstrukcja nadal będzie pełniła rolę nośną (np płyty w stanie nośności pokrytycznej),
przy mnożniku $\Lambda_{M,1}=\Lambda_{cr}$
$\mathbf{M_2} =M_{pl}$: mechanizmowi plastycznemu wskutek utworzenia się wystarczającej liczby przegubów plastycznych w konstrukcja wykonanej z materiału idealnie sztywno-plastycznego, lub przegubów uogólnionych w konstrukcji wykonanej z materiału złożonego (np. żelbetu),
przy mnożniku $\Lambda_{M, 2}=\Lambda_{pl}$
$\mathbf{M_3} =M_{brit}$: zniszczeniu konstrukcji w innej formie (np. kruche pękanie, pełzanie , itd),
przy mnożniku $\Lambda_{M,3}$
$\mathbf{M_4} =M_{SGU}$: przekroczeniu uznanych za dopuszczalne przemieszczeń, ugięć, drgań, zarysowań itd
przy mnożniku $\Lambda_{M, 4}$
Mnożnik obciążenia przypisany do mechanizmu zniszczenia $M_k \quad (k=1, 2,\ldots, N)$ definiuje się następująco
\[ \Lambda_{M,k} = \cfrac{F_{M,k}} {F_E} \tag{I-1.4} \label{L_k} \]
gdzie:
$F_E$ – konfiguracja obciążenia zewnętrznego (wzorzec odniesienia)
$F_{M,k }$ – konfiguracja obciążeń k-ta skalowana z konfiguracji odniesienia, przy zaistnieniu której realizuje się mechanizm $M_k$.
Zwróćmy uwagę, że mnożnik obciążenia ($\ref{L_k}$) jest zdefiniowany dla określonej konstrukcji, identyfikowanej $N$ mechanizmami zniszczenia $M_k, (k=1, \ldots, N)$, które jej dotyczą. Poszczególne mechanizmy są z mnożnikami granicznymi $ \Lambda_{M,k} $ , ale także z określoną konfiguracją obciążenia zewnętrznego $F_E$
Jako miarę nośności konstrukcji ze względu na stan graniczny $M_k \quad (k=1, 2,\ldots, n)$ przyjmujemy mnożnik $\Lambda_{M,k}$.
Definicja: „Nośność konstrukcji ze względu na stan graniczny $M_k$ wynosi $\Lambda_{M,k}$” oznacza, że konstrukcja niszczy się ze względu na stan $M_k$ pod obciążeniem $\Lambda_{M,k}$” razy większym od obciążenia bieżącego (odniesienia).
W niniejszym podręczniku ograniczono się do analizy mechanizmów zniszczenia $M_1=\{cr\} \text { oraz } M_2=\{pl\}$, co zasadniczo odnosi się do konstrukcji wykonanych z materiału sprężysto-plastycznego (metali), choć mechanizm {pl} jest z powodzeniem uogólniany na konstrukcje wykonane z innych materiałów poprzez wprowadzenie pojęcia uogólnionych przegubów (linii załomów) lub linii pękania.
Uniwersalny charakter mnożnika obciążenia
Mnożnik obciążenia $\Lambda$ jest podstawową wielkością stosowaną w niniejszym podręczniku do opisu nośności konstrukcji. Wielkość ta integruje zarówno własności konstrukcji (sztywność, geometrię, warunki podparcia, własności materiałowe), jak również wpływ kompletnej konfiguracji obciążenia działającego na konstrukcję.
Należy podkreślić, że mnożnik obciążenia nie jest cechą konstrukcji samą w sobie. Jest on cechą pary [ konstrukcja ; konfiguracja obciążenia] ponieważ zmiana schematu obciążenia prowadzi na ogół do zmiany wartości mnożnika granicznego, nawet przy niezmienionej geometrii i sztywności konstrukcji. Dzięki temu mnożnik obciążenia stanowi uniwersalną miarę nośności konstrukcji niezależną od rodzaju materiału oraz rodzaju analizowanego stanu granicznego. W dalszej części podręcznika pojęcie to będzie stosowane do opisu:
$\Lambda_{cr}$ – nośności krytycznej idealnie sprężystej,
$\Lambda_{lim}$ – nośności granicznej konstrukcji sprężystej obarczonej imperfekcjami,
$ \Lambda_{pl}$ – nośności plastycznej,
oraz
$\Lambda_R$ – nośności granicznej konstrukcji rzeczywistej, uwzględniającej interakcję efektów statecznościowych i plastycznych.
W takim ujęciu wszystkie klasyczne pojęcia teorii stateczności i nośności granicznej można interpretować jako szczególne przypadki jednego, wspólnego pojęcia mnożnika obciążenia.
Nośność krytyczna i graniczna idealnie sprężysta
Nośność krytyczna $\Lambda_{cr}$
Mnożnik obciążenia krytycznego
\[ \Lambda_{cr} \tag{I-1.5} \label{L_cr} \]
uzyskiwany w klasycznej analizie LBA jest taką wartością obciążenia konstrukcji przy której element, część lub całość konstrukcji traci stateczność w sensie matematycznym. $\Lambda_{cr}$ należy traktować jako przypadek szczególny mnożnika obciążenia granicznego $\Lambda_{lim}$, ovserwowany w konstrukcji bez imperfekcji. Położenia sprężystego punktu granicznego nie da się wyznaczyć w klasycznej analizie LBA. Imperfekcje systemu i jego elementów powodują, że idealne zachowanie konstrukcji sprężystej opisywane klasycznym modelem wyboczeniowym, LBA ( Linear Bifurcation Analysis), w którym definiuje się nośność krytyczną $\Lambda_{cr}$ nie jest spotykane w rzeczywistych konstrukcjach. Pręt rzeczywisty nie ulegnie „czystemu” wyboczeniu, bo od początku pracy jest zginany, więc właściwa dla niego jest analiza geometrycznie nieliniowa, a dla słabo lub średnio nieliniowych konstrukcji, stanowiących większość układów inżynierskich – analiza drugiego rzędu.
W niniejszym podręczniku nośność krytyczna $ \Lambda_{cr}$ nie jest traktowana jako odrębna miara nośności konstrukcji, lecz jako szczególny przypadek nośności granicznej $\Lambda_{lim}$, konstrkcji sprężystej, ale wyidealizowanej, pozbawionej imperfekcji geometrycznych i materiałowych.
Nośność graniczna sprężysta $\Lambda_{lim}$
Dla konstrukcji sprężystej obarczonej imperfekcjami geometrycznymi ( i ew. materiałowymi) definiuje się sprężystą nośność graniczną
\[ \Lambda_{lim} \tag{I-1.6} \label{L_lim} \]
Na rys. 1 pokazano różnice pomiędzy nośnością krytyczną systemu idealnego (bez imperfekcji) $\Lambda_{cr}$, a nośnością graniczną $\Lambda_{lim}$ na nieliniowej gałęzi pobifurkacyjnej ścieżki równowagi konstrukcji idealnie sprężystej .
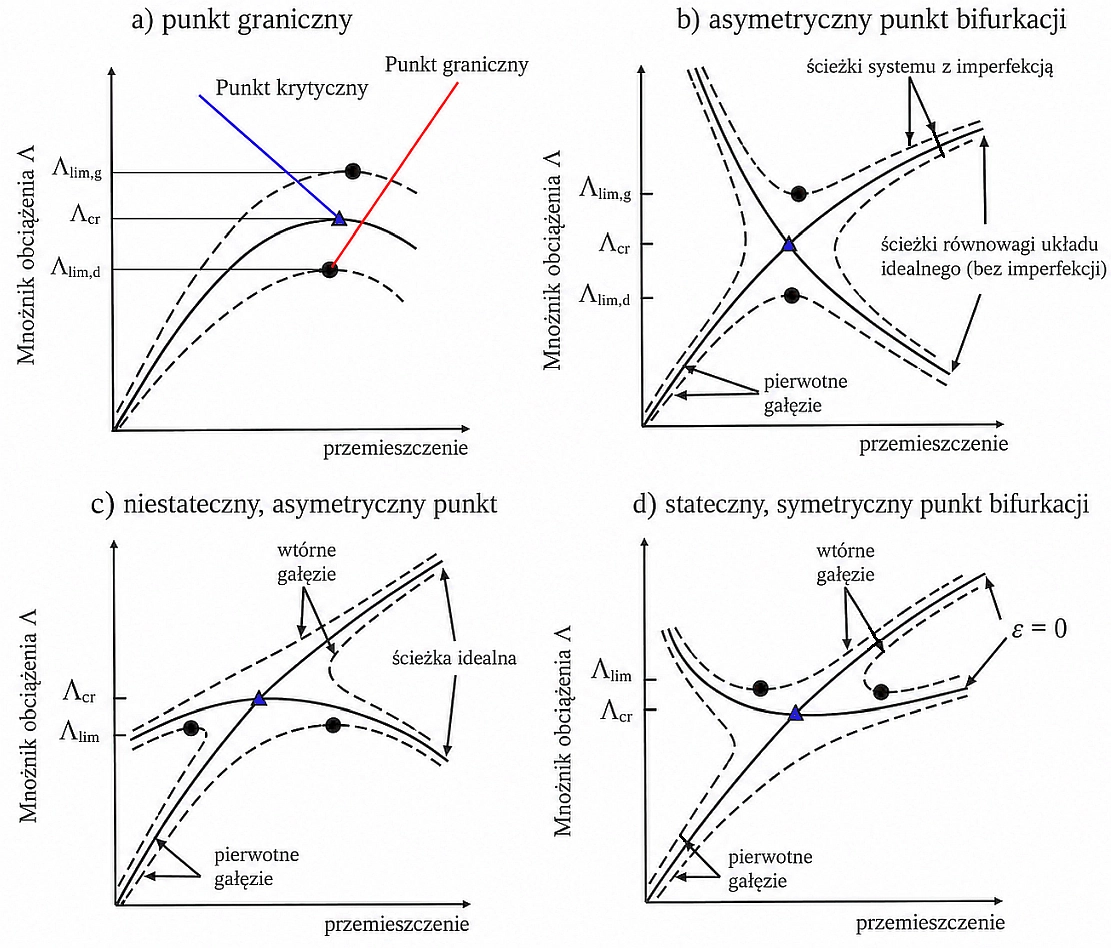
Rys. 1 Konstrukcja idealna – nośność krytyczna; konstrukcja z imperfekcjami – nośność graniczna dla czterech przypadków ścieżek równowagi konstrukcji: a) z punktem granicznym, b) z asymetrycznym punktem bifurkacji, c) z niestatecznym, asymetrycznym punktem bifurkacji, d) z e statecznym, symetrycznym punktem bifurkacji (na podstawie [8] )
Nośność plastyczna i sprężysto-plastyczna
Nośność plastyczna $\Lambda_{pl}$
Nośność graniczna idealnie plastyczna
\[ \Lambda_{pl} \tag{I-1.7} \label{L_pl} \]
jest wyznaczana w ramach klasycznej teorii nośności granicznej dla konstrukcji wykonanej z materiału sztywno-plastycznego.
Graniczny, plastyczny schemat konstrukcji zostanie osiągnięty po ukształtowaniu się ostatniego przegubu plastycznego potrzebnego do uruchomienia mechanizmu plastycznego. Ponieważ w rzeczywistości przeguby plastyczne w stanie granicznym formują się jednocześnie [9] , więc nie trzeba uwzględniać form utraty stateczności w schematach poprzedzających. Obliczenia iteracyjne są potrzebne wyłącznie do opisu stanu granicznego w procesie pushover [10] .
Nośność graniczna sprężysto-plastyczna
Rozróżnienie nośności krytycznej $\Lambda_{cr}$ , granicznej -sprężystej $\Lambda_{lim}$ i plastycznej $\Lambda_{pl}$ omówiono w artykule Nośność graniczna, a nośność krytyczna i plastyczna.
Interakcja sprężystej nośności granicznej $\Lambda_{lim}$ oraz nośności plastycznej $\Lambda_{pl}$ definiuje nośność graniczną konstrukcji $\Lambda_R$, którą można oszacować z klasycznej formuły Rankine-Merchant (10754) [11], będącej aproksymacją współdziałania efektów statecznościowych i plastycznych i nazywaną formułą sumowania odwrotności nośności:
\[ \cfrac{1}{\Lambda_R}= \cfrac{1}{\Lambda_{lim}} + \cfrac{1}{\Lambda_{pl }} \tag{I-1.8} \label{L_R} \]
$\Lambda_R$ jest nośnością graniczną konstrukcji rzeczywistej, uwzględniającą jednoczesny wpływ utraty stateczności $\Lambda_{lim}$ oraz uplastycznienia $\Lambda_{pl}$. Wielkość ta stanowi podstawową miarę nośności konstrukcji sprężysto-plastycznej stosowaną w dalszej części pracy.
W konstrukcjach rzeczywistych utrata nośności jest zwykle wynikiem współdziałania imperfekcji, nieliniowości geometrycznych oraz nieliniowości materiałowych. Z tego względu nośność graniczna $\Lambda_R$ jest bardziej realistyczną miarą bezpieczeństwa konstrukcji niż sama nośność krytyczna $\Lambda_{cr}$ uzyskiwana w analizie LBA.
Opisany wyżej model stanowi podstawowe założenie uogólnionej metody stosowanej w pracy.
Założenie jest zgodne z szerokimi badaniami [12] i innych (np. [13] , [14] ). W pracach tych pokazano, że w sytuacjach rzeczywistych, „czyste” postacie wyboczenia sprężystego praktycznie nie realizują się lub realizują na statystycznie nieistotnym poziomie nawet przy współczynniku niezawodności budynków i budowli β>3 .
Można to wykazać również teoretycznie po zastosowaniu podstawowych twierdzeń metody funkcji ważności, stosowanej w losowych symulacjach Monte Carlo, np. [15] , [16].
To samo można wykazać stosując podejście [17] , a nie [18], to znaczy podejście niesprężyste, opisujące rzeczywistą utratę stateczności.
Nośność losowa i niezawodność konstrukcji
Stochastyczny model mnożnika obciążenia konstrukcji
Na rys. 2 pokazano model mnożnika obciążenia konstrukcji (w skrócie obciążenia) jako procesu stochastyczny rozciągnięty w okresie użytkowania konstrukcji $T=\sum T_i$.
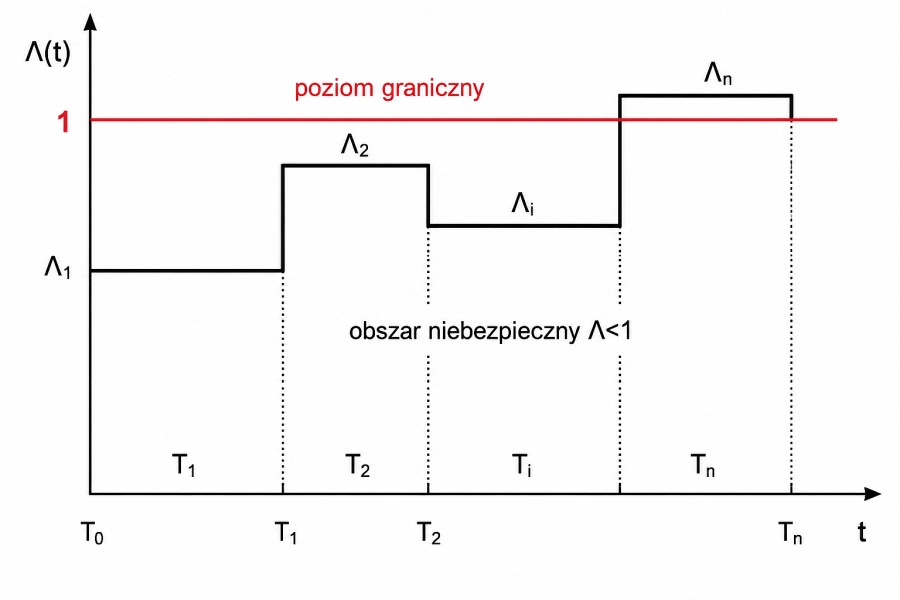
Rys.3. Model mnożnika obciążeń $\Lambda$
Przyjmuje się, że proces \Lambda(t) jest reprezentowany przez ciąg rocznych maksimów obciążenia. Założenie to jest zgodne z interpretacją probabilistyczną przedstawioną
w Dodatku A.
Granicę pomiędzy stanami bezpiecznymi i niebezpiecznym i wyznacza lczerwona inia rys. 3., która uzyskano po normalizacji względem nośności konstrukcji ΛR. Granica bezpieczeństwa odpowiada wartości
\[ \Lambda = 1 \tag{I-1.9} \label{L=1} \]
Konstrukcja może pozostawać w jednym ze stanó
\[
\left\{
\begin{array}{ll}
\Lambda >1 & \Rightarrow \text{konstrukcja bezpieczna},\\
\Lambda =1 & \Rightarrow \text{osiągnięcie stanu granicznego},\\
\Lambda <1 & \Rightarrow \text{konstrukcja nie spełnia warunku nośności}.
\end{array} \right. \tag{I-1.10} \label{L_state} \]
Nośność konstrukcji $\Lambda_R$ jest takim mnożnikiem obciążenia zewnętrznego, przy którym w okresie użytkowania konstrukcji $T=\sum T_i$ nie zrealizuje się żaden z mechanizmów zniszczenia $M_1, M_2 ,\ldots M_k , \ldots \quad k=(1, \ldots N)$ , gdzie N jest liczbą mechanizmów zniszczenia.
Nośność konstrukcji można zapisać następująco:
\[ \Lambda_R= \inf \left\{ \Lambda :\bigcup_{k=1}^{N} M_k(\Lambda) \right\} \tag{I-1.11}\label{L_R_def} \]
czyli nośność konstrukcji ΛR jest najmniejszym mnożnikiem obciążenia, przy którym realizuje się pierwszy z mechanizmów zniszczenia Mk.
Równoważnie można powiedzieć, że ΛR jest największym mnożnikiem obciążenia, dla którego nie został jeszcze zrealizowany żaden z mechanizmów zniszczenia.
Niezawodność konstrukcji Niezawodność konstrukcji jest prawdopodobieństwem zdarzenia polegającego na tym, że w całym okresie użytkowania konstrukcji $T$ nie zostanie zrealizowany żaden z mechanizmów zniszczenia $M_k \ (k=1,\ldots,N)$, czyli
\[ p_R = Pr\left\{ \bigcap_{k=1}^{N}\overline{M_k} \right\} \tag{I-1.12} \label{p_R}\]
Prawdopodobieństwo zniszczenia jest dopełnieniem ($\ref{p_R}$) , czyli
\[ p_f = 1-p_R = Pr \left\{ \max_{0\le t\le T} \Lambda(t) \ge \Lambda_R \right\} \tag{I-1.13}\label{p_f}\]
czyli prawdopodobieństwo tego, w okresie użytkowania wystąpi obciążenie większe od nośności konstrukcji.
Opis stochastycznego mnożnika obciążenia
Rozkład statystyczny obciążenia odniesienia $F_E$
Oddziaływania na konstrukcję przyjmuje się zgodnie regułą (3-1.1).
Ten format jest powszechnie uznawany ze względu na prostotę i został przyjęty przez wiele norm, w tym: normę europejską CEB (1976) [19], Comité Euro-International du Béton, Paris, France.)), ECS (1994) [20], amerykańskie ASCE (1986) [21] i ASCE (1999) [22], kanadyjską NBCC (1995) [23], autralijską SAA (1985) [24] i inne.
Ten też format przyjmiemy do wyznaczania kon figuracji odniesienia $F_E$ mnożnika obciążeń $\Lambda$. Statystyczne parametry tych obciążeń składano z różniących się parametrów obciążeń stałych zmiennych użytkowych oraz klimatycznych : śniegiem i wiatrem. Te parametry przyjęto za pracą Barlett i in (2003 [25]).
Rozkłady statystyczne obciążenia charakteryzowano dwoma parametrami stosunkiem wartości średniej $\mu$ do nominalnej $Bias$ oraz współczynnikiem zmienności $Cov$ :
\[ bias_X = \cfrac{ \mu_X}{nom_X} \\ Cov_X = \cfrac{\sigma_X }{\mu_X} \tag{I-1.14} \label{bias} \]
gdzie:
$X$ – typ obciążenia (G, Q, W,S) = (ciężar własny, obciążenie użytkowe, oddziaływanie wiatru, obciążenie śniegiem),
$nom_X$ -wrtośc nominalna – obciążenia – charakterystyczna wg normy dla okresu powrotu właściwego dla danego typu konstrukcji.
$\mu_X$ – wartość oczekiwana zmiennej X –
$ Cov_X = \cfrac{\sigma_X}{\mu_X}$ – odchylenie standardowe (średniokwadratowe ) zmiennej X,
Rozkład statystyczny ciężaru własnego
W tab.1. zestawiono parametry: wartość średnią $\mu_G= bias_Gcdot nom_G$ oraz współczynnik zmienności $Cov_G$ ciężaru własnego G konstrukcji żelbetowych, metalowych i innych. Ciężar własny ma rozkład normalny $N(\mu_G, \sigma_G)$
Tab.1 Parametry statystyczne rozkładu ciężaru własnego $G_j$ [26] – Appendix B, C,D.
\[ \begin{array}{|l|c|c|}
\hline \text{Zmienna – rozkład normalny } N(\mu,\sigma) & \text{bias}=x/\mu & \text{CoV}=\sigma/\mu \\
\hline \text{ciężar żelbetu} & \approx 1.00 & 0,03 \\
\hline \text{kombinacja wymiarów i gęstości:} & & \\
\hline \text{płyta 150 mm} & 1,00 & 0,08 \\
\hline \text{płyty i belki stropowe} & 1,00 & 0,07 \\
\hline \text{słupy} & 1,04 & 0,04 \\
\hline \text{ogólny ciężar stropu (ok. 0,48 kN/m}^2\text{)} & 1,0 & 0,06 \\
\hline \text{warstwy wykończeniowe (ok. 0,19 kN/m}^2\text{)} & 1,1 & 0,15 \\
\hline \text{model obciążeń} & 1,00 & 0,05 \\
\hline \text{model obliczeniowy obciążeń stałych} & 1,00 & 0,05 \\
\hline \text{bias = stosunek średniej do wartości nominalnej }x\text{ (normalnej)} & & \\
\hline \text{CoV}=\sigma/\mu,\ \text{współczynnik zmienności, } \sigma\text{ – odchylenie standardowe} & & \\
\hline \end{array} \]
Rozkład statystyczny obciążeń użytkowych stropów
Parametry statystyczne obciążenia użytkowego stropów i innych powierzchni zależy od wielkości powierzchni na które są przyłożone. Na rys. 3 pokazano współczynnik zmienności obciążenia użytkowego stropu w budynku mieszkalnym lub użyteczności publicznej wg [25]).
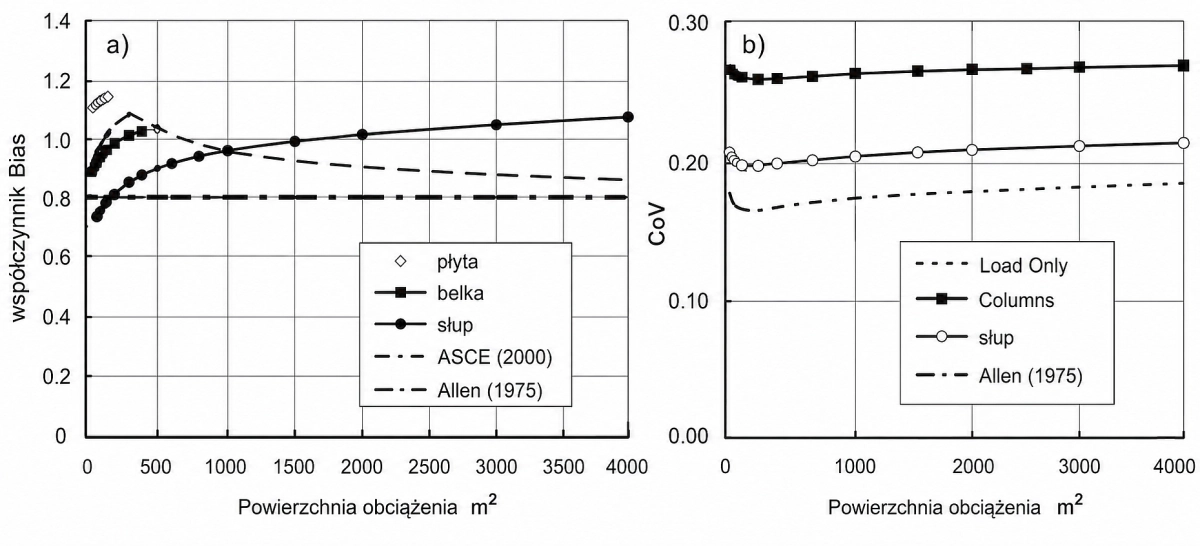
Rys. 3 Obciążenie użytkowe stropów w okresie 15 lat : a) współczynnik Bias, b) współczynniki Cov[25])
Efekty obciążenia (w belkach, słupach i wg Allen (1975) [27] nie znajdują zastosowania w naszych analizach, bowiem efekty (siły przekrojowe) będą wyznaczane w odrębnej procedurze).
Rozkład obciążenia użytkowego w długim czasie ma rozkład ekstremalny I typu (Gumbela). W określonej chwili (doraźnie) lub w okresie roku przyjmujemy jako rozkład normalny ze wskazanymi parametrami dla okresu 15 lat.
Rozkład statystyczny doraźnego obciążenia wiatrem oraz śniegiem
Rozkład statystyczny obciążenia wiatrem w czasie przyjmuje się najczęściej jako ekstremalny rozkład maksimów I rodzaju , czyli rozkład Gumbela a śnieg wg rozkładu Weibula maksiumów i jest wyczerpująco omówiony w artykule Niezawodnośc konstrukcji.
W tab. 2 podano wartości parametrów rozkładów obciązeń proponowane w pracy [26]
Tab.2 Parametry statystyczne rozkładu ciężaru własnego $G_j$ [26] – Tab 3.1.
\[ \begin{array}{|l|c|c|}
\hline \text{Zmienna – rozkład normalny }N(\mu,\sigma) & \text{bias}=\mu/x & \text{CoV}=\sigma/\mu \\
\hline \text{ciężar żelbetu} & \approx 1.00 & 0.03 \\
\hline \text{kombinacja wymiarów i gęstości:} & & \\
\hline \text{płyta 150 mm} & 1.00 & 0.08 \\
\hline \text{płyty i belki stropowe} & 1.00 & 0.07 \\
\hline \text{słupy} & 1.04 & 0.04 \\
\hline \text{ogólny ciężar stropu }(\approx 0.48\ \mathrm{kN/m^2}) & 1.00 & 0.06 \\
\hline \text{warstwy wykończeniowe }(\approx 0.19\ \mathrm{kN/m^2}) & 1.10 & 0.15 \\
\hline \text{model obciążeń} & 1.00 & 0.05 \\ \hline \text{model obliczeniowy obciążeń stałych} & 1.00 & 0.05 \\
\hline \text{bias = stosunek średniej }\mu\text{ do wartości nominalnej }x & & \\
\hline \text{CoV}=\sigma/\mu,\ \text{współczynnik zmienności} & \sigma\text{ – odchylenie standardowe} & \\
\hline \end{array} \]
Inne typy obciążeń (np. sejsmiczne, termiczne) pomija się w tej pracy.
Rozkład statystyczny wartości własnej (np. obciążenia krytycznego lub częstotliwości drgań włąsnych)
Rozkład statystyczny krytycznego mnożnika obciążenia $\Lambda_{cr}$ wyznaczymy za pracą Bijak, Chodor (1988) [28].
Równanie stateczności systemu zapiszemy w postaci
\[ \left( [K] – \Lambda_{cr} \cdot [K]^g \right) \cdot ||w||=0 \tag{I-1.15} \label{K_sys} \]
gdzie:
$[K]$ i $[K]^g$ są losowymi macierzami sztywności , odpowiednio liniową i geometryczną,
||w|| – wektor własny, opisujący kształt konstrukcji po wyboczeniu
Przyjmijmy, że losowe własności systemu są zestawione w wektor losowy $||X|| =||X_1, X_2, \dots , X_m||$, gdzie $m$ – liczba zmiennych losowych charakteryzujących system. Później pokażemy, że możemy je zredukować do liczebności niezależnych jednostek losowych w systemie [M, K,S,C,]-[Metr, Kilogram, Sekunda, Celsjusz].
Po przemnożeniu obu stron ($\ref{K_sys}$) przez wektor własny transponowany $||w||^T$, formalnym przeróżniczkowaniu po wektorze współrzędnej $X_i$ wektora [X] i uwzględnieniu zerowych wartości oczekiwanych, otrzymamy wyrażenie na wrażliwość (czułość) mnożnika krytycznego $\Lambda_{cr}$ na losowe zmiany współrzędnej wektora współrzędnej $X_i$
\[ \cfrac{\partial \Lambda_{cr}}{\partial X_i}= \cfrac{||w||^T \left [ \cfrac{\partial [K]}{\partial X_i} – \Lambda_{cr} \cfrac{d[K]^g}{d X_i}\right] ||w|| }{ ||w||^T [K]^g ||w||} \tag{I-1.16} \label{L_cr/X} \]
W przypadku zagadnienia dynamiki
\[ \left( [K] – \omega^2 \cdot [B] \right) \cdot ||w||=0 \tag{I-1.17} \label{K_dyn} \]
gdzie: $\omega$ – częstotliwość drgań własnych, a $[B]$ macierz bezwładności (mas)
analogicznie do ($\ref{L_cr/X} $) wrażliwość na zmiany parametru losowego przyjmie postać [29]
\[ \cfrac{ \partial \omega}{\partial X_i }= \cfrac{ ||w||^T \left [ \cfrac{\partial [K]}{\partial X_i} -\omega^2 \cfrac{\partial [B] }{\partial X_i}\right ] ||w|| }{2 \cdot \omega \cdot ||w||^T [B] ||w||} \tag{I-1.18} \label{L_cr,omega/X} \]
Macierze $[K]^g]$ oraz $[B]$ zależą od sił węzłowych $||F|_e$.
Imperfekcje krytyczne (najgorsze)
Ważnym zagadnieniem praktycznym jest wyznaczenie takiego kształtu imperfekcji, który będzie najbardziej zmniejszał nośność graniczną $\Lambda_{lim}$.
Zwykle przyjmuje się propozycję Chladny (1958,1974) [30], [2] i późniejszą Brendel-Ramm (1980) [31], by za krytyczny kształt imperfekcji zwany również najgorszym (ang. „worst”) uznać pierwszą postać wyboczenia, czyli imperfekcje wynikające z przeskalowania krytycznego wektora własnego konstrukcji. Takie podejście jest zgodne z pierwszą pracą na temat współczynnika wyboczeniowego Ayrton i Perry (1886) [32], ale przede wszytskim radykalnie redukuje koszty analizy probabilistycznej imperfekcji dla założonych właściwości probabilistycznych, przedstawione m.in w pracach: Elishakoff (1988) [33]; Lindberg (1988) [34] czy Kirkpatrick i Holmes (1989) [35], choć może być stosowane wyłącznie do geometrycznych imperfekcji systemowych.
Należy zwrócić uwagę, że w układach o silnej nieliniowości materiałowej, wielu bliskich wartościach własnych lub lokalnych mechanizmach zniszczenia pierwsza postać wyboczenia może nie odpowiadać globalnej imperfekcji najbardziej niekorzystnej.
Ikeda i Murota (1990, 1991) [36], [37], [38] przedstawili ścisłą matematycznie teorię umożliwiającą wyznaczyć układ i wielkości imperfekcji krytycznych nie tylko niedoskonałości (geometrii konstrukcji (ułożenia węzłów w przestrzenie), ale również ścieżkę i układ obciążenia w czasie i przestrzeni, długości skręcenia elementów, własności mechaniczne przekrojów itd. W swoich pracach potwierdzili poprawność założenia o tym, że imperfekcje krytyczne ustroju sprężystego można prognozować na podstawie wektora własnego uzyskanego w analizie LBA. Na rys. 1 zilustrowano to na przykładzie mało wyniosłej kopuły prętowej w której obserwuje się utratę stateczności wskutek przeskoku węzła.
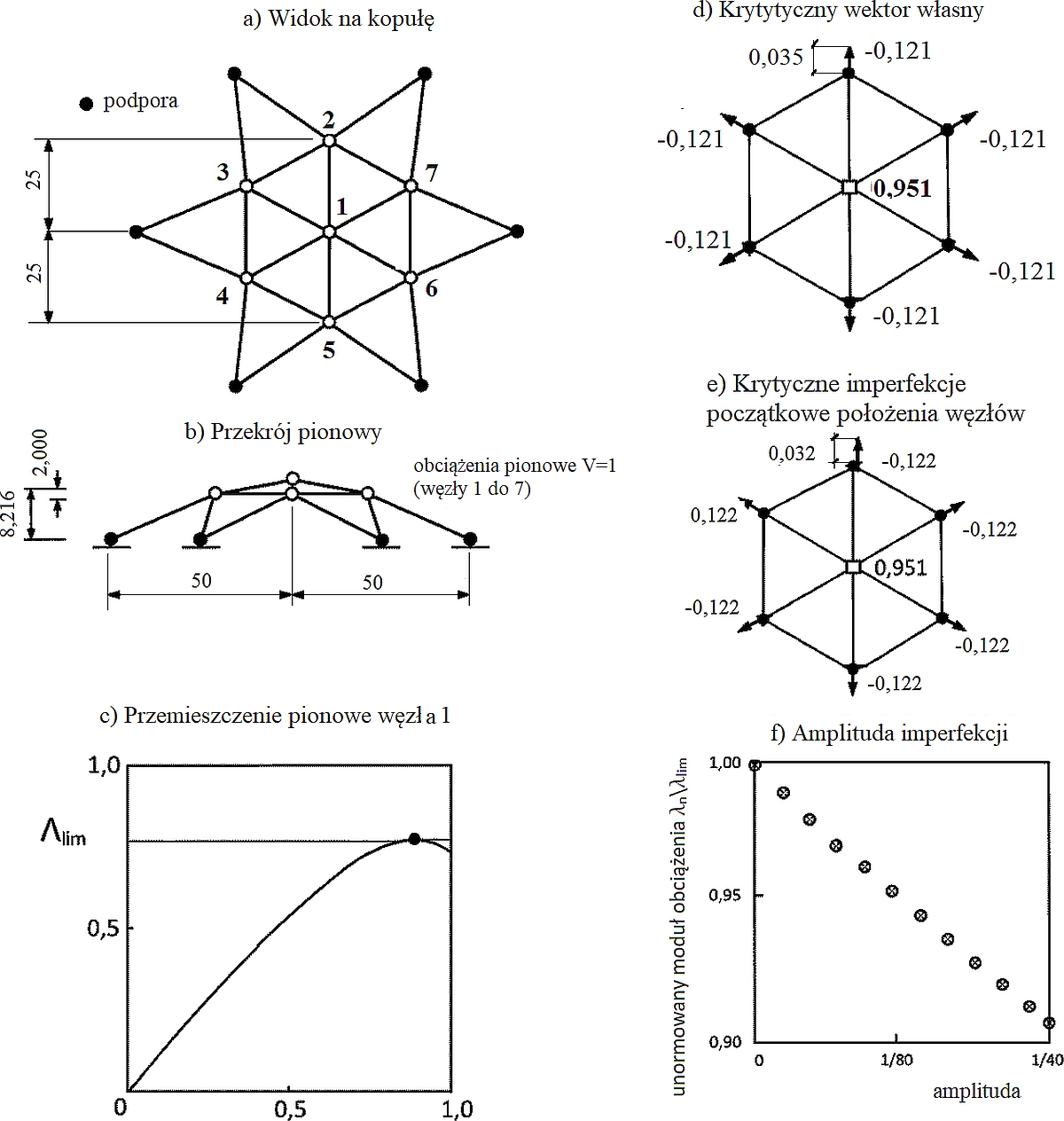
Rys.5. Imperfekcje najgorszena przykładzie małowyniosłej kopuły [37] – złożono z fragmentów Fig.1- 7
Z porównania krytycznego (pierwszego) wektora własnego (rys.1d) z krytyczną imperfekcja (rys.1 e) stwierdzamy, że różnice praktycznie nie występują. Z rys.1. f) wynika natomiast, że imperfekcje zmniejszają nośność graniczną kopuły tym bardziej im są większe.
Tym samym hipotezę o treści ” W ustroju idealnie sprężystym z pojedynczym punktem granicznym, krytyczne (najgorsze) imperfekcje mają kształt podobny do pierwszego (najniższej) postaci wyboczenia systemu” potwierdzono teoretycznie i jest ona podstawą analizy systemów idealnie sprężystych bez konieczności probabilistycznego badania losowych kształtów imperfekcji geometrycznych. Ta szybka metoda dotyczy jednak wyłącznie kształtu sprężystej imperfekcji krytycznej a nie amplitudy tej imperfekcji.
Pytanie o tym jaka jest amplituda krytycznych imperfekcji sprężystych nadal pozostaje otwarte.
Z rysunku 1 f) wynika, że obniżenie nośności granicznej systemu zwiększa się wraz ze wzrostem amplitudy imperfekcji.
W pracy Ohsaki (2002) [39] pokazano, że krytyczna imperfekcja w systemie ze statecznym puntem bifurkacji – niewielka niedoskonałość może być gorsza niż duża niedoskonałość.
Wyznaczenie imperfekcji krytycznych dla konstrukcji sprężysto-plastycznej nie było poddane szczególnej analizie ze względu na wielokrotnie złożony problem. Od VIII wieku do dzisiaj trwają na przykład dyskusje o „paradoksie plastycznego wyboczenia”, np: [40], czyli dyskusje o tym, która z dwóch teorii plastyczności : teorię sprężysto-plastycznych odkształceń Hencky-Iljusina (Hencky,(1924) [41] czy też teorię płynięcia Hill (1950) [42] – należy stosować przy analizie wyboczenia konstrukcji sprężysto-plastycznych. Badania eksperymentalne dają bowiem wyniki bliższe jednej lub drugiej teorii w zależności od rodzaju konstrukcji (np. słup z profilu, czy powłoka z blachy), a także rodzaju materiału , z którego jest wykonana (np stal , czy stop aluminium).
Smukłość i współczynnik amplifikacji
Tradycyjną analizą, stosowaną w projektowaniu konstrukcji wrażliwych na efekty niestateczności jest analiza wyboczeniowa. W podejściu inżynierskim jest ona realizowana z użyciem współczynników wyboczeniowych (najczęściej wyboczenia giętnego lub bocznego – zwichrzenia). Istotę współczynnika wyboczeniowego $\chi$ dobrze oddaje jego nazwa angielska reduction factor, czyli współczynnik redukcyjny, bo określa on redukcję (zmniejszenie) nośności elementu $F_{Rb}$ w stosunku do nośności przekroju sprawczego tego elementu$F_R$.
\[ \chi=\cfrac{F_{Rb}}{F_R} \tag{I-1.19} \label{chi} \]
Współczynnik ($\ref{chi}$) uwzględnia efekty niestateczności elementu (wyboczenie giętne lub skrętne lub giętno-skrętne, w tym zwichrzenie) i jest nieliniową funkcją smukłości elementu,. Przekrój sprawczy jest przekrojem elementu, który decyduje o jego nośności i jest nazywany również przekrojem wymiarującym lub krytycznym. Tego ostatniego określenia nie używamy, bo słowo „krytyczny” rezerwujemy dla zjawiska utraty stateczności, a ogólniej stateczności.
Smukłość elementu
W przepisach normowych Eurokod wprowadzono definicję smukłości względnej pręta, jako pierwiastek ze stosunku nośności przekroju do nośności krytycznej elementu. Definicja ta w zapisie obejmującym kilka przypadków wyboczenia (*=_, ,LT, T, TF) i klas przekrojów (•= 1, 2, 3, 4) jest następująca:
\[ \overline \lambda_* =\sqrt{\cfrac{F_{R•}}{F_{cr*}}} \tag{I-1.20} \label{lambda} \]
gdzie:
indeks przypadków wyboczenia: _ (spacja) – wyboczenie giętne, LT- zwichrzenie (wyboczenie boczne), T- wyboczenie skrętne, TF – wyboczenie giętno-skrętne
indeks klasy przekroju: 1,2,3,4, które omówiono w artykule Klasy przekroju stalowego. Przekroje żelbetowe oraz zespolone (a także drewniane) rozpatruje się analogicznie jak przekroje stalowe klasy 3 (metodami teorii sprężystości), ale z uwzględnieniem nieliniowego zachowania betonu oraz wpływu czasu i pełzania na wytrzymałość drewna.
$F_{R•}$ – nośność sprężysta (po uplastycznieniu lub utracie wytrzymałości tylko jednego punktu przekroju) – mierzona siłą przekrojową F (siłą osiową N, lub momentem zginającym M, lub momentem skręcającym T, lub bimomentem Bω, itd.), odpowiednia dla klasy przekroju (•=1,2,3,4), na przykład: $N_{R,1,2,3} = A \cdot f_y$, $N_{R4}= A_{eff} \cdot f_y$; $M_R= W_y \cdot f_y$ , itd.
$F_{cr*}$ – nośność krytyczna elementu przy niestateczności typu *.
Dla przypadku wyboczenia giętnego (*=_) smukłość ($\ref{lambda}$) wyraża się formułą
\[ \overline \lambda =\sqrt{\cfrac{N_{R}}{N_{cr}}} \tag{I-1.21} \label{lambda_w} \]
gdzie nośność przekroju na ściskanie $N_R=A \cdot f_y$ , ( A- pole przekroju, $f_y$ – wytrzymałość materiału – granica plastyczności dla stali), a $N_{cr}$ jest siłą krytyczną (Eulera), przy której element traci stateczność i wybacza się.
Dla przypadku wyboczenia bocznego (zwichrzenia) (*=LT):
\[ \overline \lambda_{LT} =\sqrt{\cfrac{M_{R}}{M_{cr}}} \tag{I-1.22} \label{lamda_wLT} \]
gdzie nośność przekroju na zginanie $M_{R}=W\cdot f_y$, ( W – wskaźnik wytrzymałości przekroju, f_y jak wyżej), a $M_{cr}$ jest zginającym momentem krytycznym (Własowa), przy której element traci stateczności przez utratę płaskiej postaci zginania (zwichrzenie).
Osiowa siła krytyczna $N_{cr}$ nazywana często siłą Eulera $N_E$ jest obliczana ze wzoru:
\[ N_{cr}= \cfrac{\pi^2 \cdot EI} {L^2_{cr}} \tag{I-1.23} \label{N_cr} \]
Moment krytyczny $M_{cr}$ wyraża się bardziej złożonymi zależnościami i w praktyce wyznacza numerycznie, np. z zastosowaniem programu LTBEAM [43] .
Siła krytyczna ($\ref{N_cr}$) opisuje wyboczenie giętne idealnie prostego pręta o długości L i momencie bezwładności przekroju I, ściskanego czystą siłą osiową N. Pręt wykonany jest z materiału idealnie sprężystego o module Younga E. Wartość obciążenia osiowego pręta ($\ref{N_cr}$) pierwiastkiem równania różniczkowego pręta zginanego i ściskanego, które uzyskał Euler już w XVIII w. i oznacza siłę, przy której następuje bifurkacja (rozdwojenie) stanu równowagi pręta, to znaczy punkt na ścieżce równowagi. w którym pręt może przeskoczyć ze stanu równowagi prostoliniowej do stanu równowagi krzywoliniowej. Takie zjawisko nazwano wyboczeniem.
Długość wyboczeniowa $L_{cr}$ jest nazywana długością Eulera $L_E$ i w praktyce wyznacza się ją z zależności:
\[ L_{cr}= \mu \cdot L \tag{I-1.24} \label{Dl_cr} \]
gdzie:
$\mu$ – współczynnik długości wyboczeniowej,
L- długość teoretyczna pręta.
Wprowadzenie wzoru Eulera ($\ref{N_cr}$) do formuły ($\ref{lambda_w}$) umożliwia otrzymanie klasycznej, powszechnie stosowanej również dzisiaj, postaci wyrażenia na smukłość względną $ \overline \lambda$ pręta ściskanego o smukłości bezwzględnej $\lambda$ ( [4]-(6.50):
\[ \overline \lambda = \cfrac {\lambda} {\lambda_1} \tag{I-1.25} \label{lamda_wEuler} \]
gdzie:
bezwzględna smukłość pręta
\[ \lambda = \cfrac{L_{cr}}{I-1} \cdot k_• \tag{I-1.26} \label{lambda_preta} \]
smukłość porównawcza (dla elementu stalowego)
\[ \lambda_1=\pi \sqrt{\cfrac{E}{f_y}}=93,9\cdot \varepsilon \tag{I-1.27} \label{lambda_p} \]
gdzie współczynnik klasy przekroju $k_•$ =1 dla przekroju klasy (•=1,2 i 3) oraz $k_•=\sqrt{\cfrac {A_{eff}} {11}}$ dla przekroju klasy (• = 4) oraz współczynnik materiałowy
\[ \varepsilon= \sqrt{\cfrac{235}{f_y}} \tag{I-1.28}\label{eps} \]
jest specyficzny dla konstrukcji stalowych.
Dla elementów żelbetowych, zespolonych i drewnianych wyrażenia ($\ref{lambda_p}$) i ($\ref{eps}$) wymagają modyfikacji w sposób pokazany w dalszej części podręcznika.
Długość wyboczeniowa $L_{cr}$ wg ($\ref{Dl_cr}$) jest nazywana często (np. w konstrukcjach żelbetowych) długością efektywną i oznaczana symbolem $l_0$.
W tym miejscu najczęściej prezentuje się kilka podstawowych schematów statycznych prętów i podaje dla nich współczynniki długości wyboczeniowej (rys.5). Nie powinniśmy tego robić, bo może to wprowadzić wiele zamieszania, na przykład przez doprowadzenie do przekonania, że maksymalna wartość współczynnika μ wynosi 2 (jak dla wspornika). Jest to szkodliwa informacja, bowiem faktycznie współczynnik długości wyboczeniowej μ pręta może być znacznie większy od 2 i przyjąć wartości z przedziału:
\[ 0,5 \le \mu \le \infty \tag{I-1.29} \label{l_e} \]
gdzie:
$\mu=0,5$ odpowiada schematowi pręta obustronnie idealnie utwierdzonego (o nieskończonych sztywnościach podpór w tym zamocowania) (rys. 4 d),
$\mu=1,0 $ opowiada prętowi podpartemu nieprzesuwnie i idealnie przegubowo na obu końcach (rys. 4a),
$\mu=\le \infty $ dotyczy pręta obustronnie sprężyście podpartego w podporach o zerowych sztywnościach (czyli pręta swobodnie zawieszonego w przestrzeni) (rys. 4 .g).
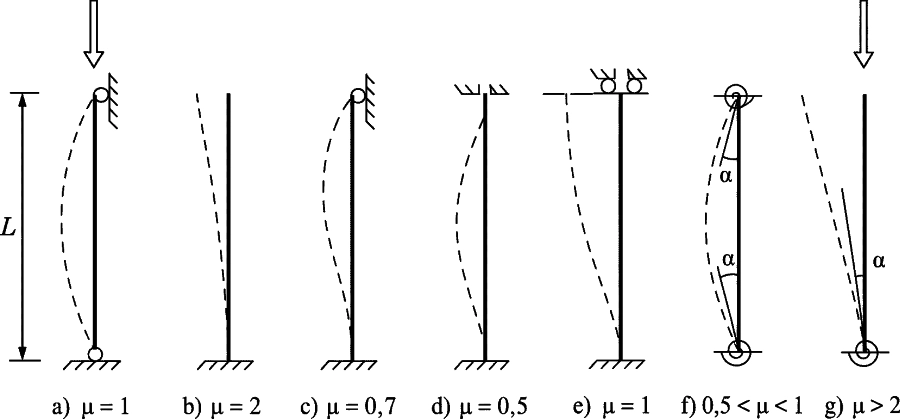
Rys.4 Bazowe postacie wyboczenia Bazowe postacie wyboczenia [44]– rys 5.7
Następnie należy stwierdzić, ze rzeczywiste pręty ściskane (słupy) nie są idealne:
1) oś pręta nie jest prosta ze względu na imperfekcje geometryczne osi pręta,
2) przekrój pręta i parametry materiałowe nie są stałe po długości, ze względu na niedoskonałości hutnicze, wpływające na charakterystyki przekroju,
3) siła ściskająca nie jest idealnie stała po długości pręta, ale co ważniejsze ze względu na wstępne mimośrody przyłożenia do głowicy słupa – pręt w zasadzie od początku pracy jest obciążony dodatkowymi momentami zginającymi.
W rzeczywistości nigdy nie będziemy mieli do czynienia z „czystym” ściskaniem, ale ze zginaniem ze ściskaniem, a do analizy takiego zagadnienia właściwe są metody co najmniej drugiego rzędu
Współczynnik amplifikacji
Wzór Eulera ($\ref{N_cr}$) nie powinien być bezkrytycznie stosowany w odniesieniu do pręta rzeczywistego – jest bowiem słuszny wyłącznie dla innego jakościowo przypadku – dla ściskanego pręta idealnego. Wzór ten ma natomiast duże znaczenie poznawcze, w szczególności jako ważący przykład w teorii katastrof [45] oraz w opisie zjawiska wyboczenia i utraty stateczności układów idealnych w naukach podstawowych: matematyce, fizyce i mechanice.
Rozważmy dowolną konstrukcję poddana dowolnemu (siły skupione, rozłożone, termiczne, wymuszenia geometryczne), zewnętrznemu obciążeniu w konfiguracji obliczeniowej $F_{Ed}$. Załóżmy, że podczas zwiększania wartości obciążenia proporcjonalnie do mnożnika $\Lambda$ – pod obciążeniem $F_{cr}=Λ_{cr} \cdot F_{Ed}$ nastąpi utrata stateczności konstrukcji. Zgodnie z klasyczną teoria Ayrton-Perry – przemieszczenia i siły przekrojowe II rzędu można uzyskać poprzez przemnożenie wielkości I rzędu przez współczynnik amplifikacji (wzmocnienia)
\[ a_\Lambda= \cfrac {chi}{1-\cfrac{chi}{\Lambda_{cr}}} \tag{I-1.30}\label{a_L} \]
\[ \Lambda_{cr}= \cfrac {F_{cr}}{F_{Ed}} \tag{I-1.31}\label{Lam_cr} \]
a obciążenie krytyczne jest obciążeniem Eulera, równym dla prostego pręta sile Eulera $F_{cr}=N_{cr}$ ($\ref{N_cr}$) obliczonej dla $L_{cr}=L$ .
Przy zbliżaniu się do stanu krytycznego mamy;
\[ \lim \limits _{F_{Ed}\to F_{cr}} \, a_\Lambda = \infty \tag{I-1.32}\label{lim-a_L} \]
Przez analogię w innych stanach granicznych, będą definiowane odpowiednie mnożniki obciążenia, uznawane za nośność konstrukcji zgodnie z przyjętym kryterium stanu granicznego. Przykładowo w granicznym stanie plastycznym na skutek utworzenia wystarczającej liczby przegubów plastycznych uruchamia się mechanizm plastyczny pod obciążeniem z mnożnikiem
\[ \Lambda_{pl}= \cfrac {F_{pl}}{F_{Ed}} \tag{I-1.33}\label{Lam_pl} \]
Klasyfikacja teorii II rzędu
W podręczniku [46] przedstawiono klasyfikację metod drugiego rzędu na tle licznych przykładów obliczeń wykonanych programem S3D [47] , który wykorzystuje teorię dużych przemieszczeń i obrotów z uwzględnieniem przestrzennego zginania i skręcania. S3D jest oprogramowaniem badawczym na Uczelni i nie jest komercyjnie dostępny.
Autorzy pokazują, że nie ma jednej teorii II rzędu, a jej kategorie należy ustalać wg kryterium ujętych efektów II rzędu i opisywanych zjawisk. Proponują następujące kategorie teorii drugiego rzędu:
Kategorie teorii II rzędu
Kategorie 1 do 3 zdefiniowane w ramach klasycznej teorii II rzędu dla prętów krępych (niewrażliwych na skręcanie skrępowane):
- kategoria 1 : zagadnienie zginania jednoosiowego z siła normalną (wyboczenie giętne)
Teoria zupełnie nieodpowiednia do praktycznych zadań inżynierskich, bowiem zwichrzenie jest obecne nie tylko w konstrukcjach metalowych, ale także żelbetowych i drewnianych, - kategoria 2 : zagadnienie zginania dwuosiowego z siła normalną (dwuosiowe wyboczenie giętne)
Teoria nieodpowiednie do zagadnienia ściskania ze skręcaniem , w szczególności skrępowanym, czyli w istocie też wyłączona z praktycznych zastosowań inżynierskich, - kategoria 3 : zagadnienie zginania dwuosiowego z siła normalną i skręcaniem (dwuosiowe wyboczenie giętne i skrętne )
Teoria nieodpowiednia do zagadnienia skręcania skrępowanego, czyli zwichrzenia i nie powinna być wyłączona z zastosowań inżynierskich
Kategorie 3P : kat 3 z Paczeniem ( w oryginale 3W : kat. 3 mit Wolbrakrafttorsion) i 3PS: kat 3 ze Skręcaniem od Paczenia (w oryginale 3WS: kat 3. mit Sekundare Schubformungen)
Teorie są zdefiniowane w ramach teorii II rzędu dla prętów cienkościennych ( wrażliwych na skręcanie skrępowane i paczenie przekroju) i mogą być stosowane do praktycznych inżynierskich zagadnień konstrukcji wrażliwych na utratę stateczności giętne, skretnej i giętno-skrętnej ( w tym zwichrzenia)
- kategoria 3P : zagadnienie skręcania prętów z przekrojem bez oporu skręcania:
$k=\cfrac {G\cdot I_T} {E \cdot I_{ \omega} } = 0 $
$ \to \kappa = \cfrac {chi}{1+k} =1$, gdzie
$ I_T$ – moment bezwładności czystego skręcania (Saint Venanta), G – moduł Kirchoffa,
$I_{\omega}$ – wycinkowy moment bezwładności, E – moduł Younga, - kategoria 3PS : zagadnienie wyboczenia skrętnego prętów o przekroju z charakterystyką $\kappa < 1$.
W ramach tej teorii można analizować zjawisko wyboczenia giętno skrętnego (w tym zwichrzenia) zgodnie z teorią Własowa.
Teorie wyższych rzędów (III rząd i wyżej) powinny być stosowane dla konstrukcji cięgnowych i membranowych, co zapewniają specjalizowane programy, np. Abaqus [48] lub Sofistik [49] i in.
Dodatkowo w pracy [46] zamieszczono wyniki testów innego programu badawczego. Natomiast w opracowaniu [50] przeprowadzono testy dla programu komercyjnego Consteel. Z testów wynika, że jeśli program KSTAB zalicza się do dokładnych, to program Consteel należy zaliczyć do kategorii wyższej o rząd.
Zadania do testowania oprogramowania inżynierskiego
Przedstawiony w Tab.1 zestaw testów z pracy [46] jest obecnie uznany za zadania wzorcowe (ang. benchmark) do testowania oprogramowania stosowanego do analizy konstrukcji wg teorii drugiego rzędu, która jest nieodłączną częścią metod imperfekcyjnych.
Tab. 1. Zadania Benchmark do testowania oprogramowania drugiego rzędu [46]
(opracowano na podstawie [50] )
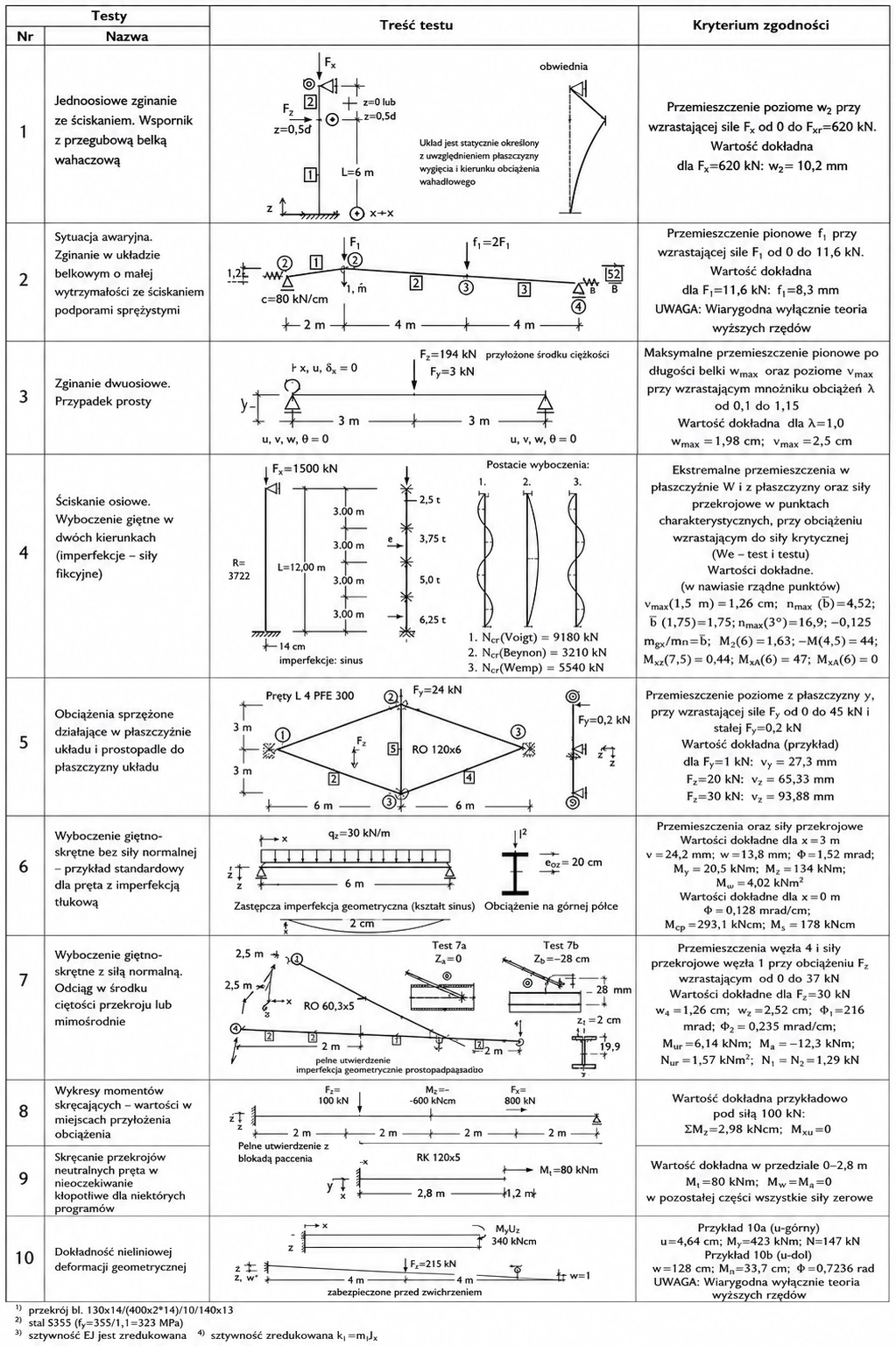
Z dotychczas wykonanych testów wynika, że większość zadań inżynierskich można wiarygodnie analizować w ramach teorii II rzędu kategorii 3PS, ale zadania typu 2 (niesymetryczna kratownica Misesa na podporach sprężystych) oraz typu 5 (układ tensegrity) i typu 7 (zwichrzenie z siła normalną – cięgnami zamocowanymi w osi belki) a także typu 10 ( niestateczność przy bardzo dużych ugięciach) – wiarygodna jest wyłącznie teoria dużych przemieszczeń i obrotów. W tym przypadku należy stosować programy naukowe, np. ABAQUS [48] .
We współczesnej praktyce projektowej, szczególnie konstrukcji metalowych stosuje się powszechnie pręty cienkościenne, których teoria sformułowana przez Własowa [51] jest uogólnieniem teorii prętów o przekroju krępym, a na jej gruncie można wyjaśnić i opisać zjawisko zwichrzenia i wyboczenia giętno-skrętnego. Pręty cienkościenne nazywane uogólnionymi są podatne na paczenie i występują w nich dodatkowe siły przekrojowe: bimoment $B_{\omega}$ oraz moment giętno-skrętny $T_{ \omega }$.
Dla praktyki inżynierskiej interesująca jest teoria dopiero kategorii 3PS, która jest już implementowana do współczesnych programów MES, w tym w stosowanym w niniejszym podręczniku programie [52].
Wrażliwość konstrukcji na nieliniowości, rząd teorii i imperfekcje
Wrażliwość konstrukcji na nieliniowości geometryczne objawia się tym, że rezultaty uzyskane według teorii liniowej są obarczone zbyt dużymi błędami. Dla konstrukcji wrażliwych na nieliniowości należy stosować teorię nieliniową. Poniżej pokażemy, że można wskazać proste, kryterium wrażliwości na nieliniowości, dotyczące każdej konstrukcji- nawet pręta rozciąganego. Rząd teorii nieliniowej oznacza stopień aproksymacji odkształceń (lub przemieszczeń) nieliniowych poprzez ich rozwinięcie w potęgowy szereg Taylora podług potęg tych odkształceń.
Imperfekcje są pojęciem niezależnym od wrażliwości konstrukcji na nieliniowości i rząd teorii. Ponieważ jednak analiza imperfekcyjna jest nieodłącznie związana z teorią przynajmniej drugiego rzędu, więc można przyjąć, że konstrukcje wrażliwe na efekty drugiego rzędu są wrażliwe na imperfekcje i odwrotnie.
Teoria I rzędu i wyższych. Kryterium wrażliwości „5%” odkształceń
Teoria I rzędu jest przybliżeniem zagadnienia brzegowego mechaniki konstrukcji dla małych odkształceń i przemieszczeń.
Uniwersalnym kryterium wrażliwości konstrukcji na nieliniowości jest kryterium „5%” odkształceń, które można sformułować następująco:
Jeśli w dowolnym miejscu konstrukcji odkształcenia liniowe I rzędu $\varepsilon$ przekraczają „5%” , to konstrukcja jest wrażliwa na nieliniowości geometryczne – powinna być analizowana teorią co najmniej II rzędu.
Kryterium dotyczy w istocie odkształceń plastycznych i zostało oryginalnie sformułowane w obszarze technologii obróbki metali, np. [53]. ale też było wielokrotnie potwierdzane dla różnych konstrukcji budowlanych (np. [54] i in. W niniejszym podręczniku kryterium „5%” pokazano na przykładach pręta rozciąganego i pręta ściskanego z imperfekcjami.
Warto zwrócić uwagę, że kryterium „5%” dotyczy odkształceń, a nie przemieszczeń, a także to, że może obowiązywać również konstrukcji żelbetowych , mimo, że odkształcenie w betonie jest ograniczane do 3,”5%”. Dzieje się tak , że zgodnie z normą [44]– tab. C.1 dopuszcza się odkształcenie charakterystyczne stali klasy B $\varepsilon_{uk}>5$%, a klasy C powyżej $\varepsilon_{uk}>57,5 $% , a graniczne odkształcenie obliczeniowe stali zbrojeniowej wynoszą $\varepsilon_{ud}=0,9 \cdot \varepsilon_{uk}$.
Z przykładu pręta ściskanego z imperfekcjami. wynika również, że odkształcenia preta z imperfekcjami przekraczają umowną granicę spręzystości (plastycznoąci) już dla obciążenia $F=50$% $F_{cr}$, to znaczy klasyczna teoria wyboczeniowa [18] nie jest właściwa, co potwierdza tezę podręcznika, że metody wyboczeniowe można uznać tylko za historyczne.
Stabilność konstrukcji
Warunek stateczności konstrukcji jest prosty
\[ \Lambda_{cr} >1 \tag{I-1.34} \label{L_cr>1} \]
i dotyczy globalnego mnożnika obciążeń, to znaczy uzyskanego dla całego systemu konstrukcyjnego, a nie wydzielonego pręta. Oczywiście z globalnego warunku ($\ref{Dl_cr}$) wynika, że stabilność będzie zachowana dla każdego fragmentu konstrukcji w tym dla każdego wydzielonego pręta.
Warunek ($\ref{Dl_cr}$) obejmuje tylko te formy niestateczności, które są uwzględnione w analizowanym modelu matematycznym. Na przykład w klasycznym modelu, złożonym z prętów o sześciu stopniach swobody – nie będzie uwzględnione zwichrzenie prętów. W celu uwzględnienia tej formy niestateczności należy analizować pręty Własowa. Niestateczność lokalna płyt będzie uwzględniona dopiero po zamianie ścianek prętów na panele płytowe.
Kryterium „10x” globalna nośność krytyczna
Wrażliwość na efekty drugiego rzędu, jest stopniem przyrostu odpowiednich sił wewnętrznych lub momentów, lub jakąkolwiek innej zmiany zachowania się konstrukcji w wyniku deformacji. Wrażliwość ta może być oceniona poprzez zbadanie mnożnika obciążenia krytycznego ($\ref{L_cr}$). W normie do projektowania konstrukcji stalowych [4], kl. 5.2.1(3), wzór (5.1) kryterium wrażliwości konstrukcji na efekty drugiego rzędu zdefiniowano poprzez graniczny mnożnik krytyczny (nośność krytyczną) $\Lambda_{cre, lim}$, w taki sposób, że jeśli dla analizowanej konstrukcji globalnie zachodzi:
\[ \Lambda_{cr} < \Lambda_{cr,lim} \tag{I-1.35}\label{L_cr,lim} \]
to należy stosować analizę drugiego rzędu.
Krytyczny mnożnik $ (\ref{Dl_cr} $) odniesiono do obciążeń obliczeniowych $\Lambda_{cr} = \cfrac{F_{cr}}{F_{Ed}}$,, więc mówi on o tym ile razy konfiguracja obciążenia $F$ może przekroczyć obciążenia obliczeniowe $F_{Ed}$, by nie nastąpiła jeszcze utrata sprężystej stateczności całej konstrukcji, jej fragmentu lub dowolnego elementu (np panelu płytowego lub pręta).
Wartość graniczna nośności krytycznej) $ \Lambda_{cr,lim}$ wynosi:
\[ \Lambda_{cr,lim} = \begin {cases}
10, \quad \text{w przypadku analizy sprężystej} \\
15 \quad \text { w przypadku analizy plastycznej}
\end {cases}
\tag{I-1.36} \label{Lam_cr,lim} \]
Wyższa wartość $\Lambda_{cr,lim}$ ($\ref{Lam_cr,lim}$) w przypadku analizy plastycznej jest uzasadniona tym, że zachowanie się konstrukcji oraz jej stan graniczny mogą być silnie uwarunkowane nieliniowymi właściwościami materiału (np. gdy w ramie tworzą się przeguby plastyczne i dochodzi do redystrybucji momentów, lub gdy w ramie występują węzły podatne powodujące znaczący nieliniowy wzrost odkształceń).
Z praktyki projektowej wynika, że konstrukcje stalowe o nośności krytycznej większej od ($\ref{Lam_cr,lim}$) są wyjątkowe i wówczas najczęściej mamy do czynienia z nieoptymalnym ich zaprojektowaniem.
Dla stwierdzenia poprawnego zaprojektowania konstrukcji analizowanego modelu wystarczy spełnienie kryterium stateczności ($\ref{Dl_cr} $), Jeśli model konstrukcji nie jest obarczony imperfekcjami , to stwierdzenie stateczności dotyczy konstrukcji idealnej. W tym przypadku Kryterium ($\ref{Dl_cr} $) można stosować dla innych niż stalowe konstrukcji (żelbetowe, zespolone, drewniane, murowe). W szczególności dla konstrukcji żelbetowych kryterium to powinno być stosowane równoważnie do „kryterium „10%”. Należy zwrócić uwagę, że analiza LBA wykorzystuje inny algorytm numeryczny od analizy II rzędu ( rozwiązanie problemu własnego i odwracanie macierzy sztywności układu konstrukcyjnego),ale programy w których zaimplementowano analizę LBA wyposażono również w algorytmy II rzędu.
Z praktyki projektowej wynika że:
1) większość konstrukcji inżynierskich (stalowe, zespolone) i dużą część konstrukcji żelbetowych należy analizować metodami drugiego rzędu,
2) w przypadku ograniczenia się do analiz pierwszego rzędu, należy uzasadnić, że spełniony jest warunek $\Lambda_{cr} \ge \Lambda_{cr,lim}$. Warunku tego nie trzeba sprawdzać, jeśli analiza jest „od razu” II rzędu. W przypadku niestateczności konstrukcji należy jednak przeprowadzić analizę LBA, w celu oceny problemu i zidentyfikowania tych miejsc konstrukcji, które są krytyczne dla stateczności.
3) kryterium wrażliwości na efekty drugiego rzędu nie należy traktować jako nakazu projektowania tak stabilnych konstrukcji, bo wystarczy spełnienie warunku stateczności ($\ref{L_cr>1} $).
4) analizę LBA zaleca się przeprowadzić dla każdej konstrukcji z przewodnim celem innym od wyrażonego kryterium ($\ref{Dl_cr}$), a mianowicie jako element optymalizacji konstrukcji , polegającej na zidentyfikowania krytycznych, lokalnych miejsc konstrukcji, których usztywnienie niewielkim kosztem może doprowadzić do wielokrotnego zwiększenia wskaźnika stateczności $\Lambda_{cr}. Jest to podstawowy sposób optymalizacji konstrukcji obok sposobu polegającego na tym, że w konstrukcjach statycznie niewyznaczalnych istotne zmniejszenie ciężaru całej konstrukcji można uzyskać poprzez zwiększenie sztywności kliku dominujących elementów i w ten sposób odciążenie (i zmniejszenie ciężaru) innych słabszych elementów , ale występujących w większej liczbie. W większości współczesnych konstrukcji stosowanie strategii wymiarowania wyodrębnionych elementów jest zawodne z punktu widzenia uzyskania optymalnej konstrukcji
Kryterium ($\ref {Lam_cr,lim}$) pozwala zakwalifikować konstrukcje do wrażliwych jeszcze przed wykonaniem obliczeń drugiego rzędu na podstawie pomocniczej, quasiliniowej analizy LBA .
Zwracamy uwagę, że czysta analiza wyboczeniowa LBA polega na wyznaczeniu mnożnika krytycznego konfiguracji obciążeń idealnego systemu konstrukcyjnego i może być traktowana jedynie jako pomocnicza analiza, służąca do rozpoznania wrażliwości konstrukcji i jej niestatecznych miejsc , ale nie może zastąpić metod imperfekcyjnych stosowanych do sprawdzenia stateczności i wytrzymałości poszczególnych przekrojów konstrukcji.
Wrażliwość konstrukcji na imperfekcje
Każda konstrukcja, która zgodnie z kryterium ($\ref{Dl_cr} $), jest niewrażliwa na efekty drugiego rzędu jest również niewrażliwa na imperfekcje. Z praktyki projektowej wynika, że bardzo stabilne są już konstrukcje dla których
\[ \Lambda_{cr} > 3 \tag{I-1.37} \label{Lam_cr,3} \]
Wymóg przeprowadzenia analizy II rzędu w celu uwzględnienia imperfekcji konstrukcji pociąga za sobą, wniosek, że w konstrukcji niewrażliwej na efekty drugiego rzędu można pominąć imperfekcje. Kryterium wrażliwości ($\ref{Dl_cr}$) jest warunkowane statecznością najsłabszego ogniwa zawartego w konstrukcji i wszystkich tych form niestateczności, które są uwzględniane w modelu. Dotyczy więc zarówno imperfekcji globalnych (przechyłowych) jak i lokalnych (łukowych) w konstrukcjach prętowych, a stąd wynika, że w klasycznej metodzie wyboczeniowej dla konstrukcji niewrażliwych na imperefekcje można by nie stosować współczynników wyboczeniowych ( w tym zwichrzenia , jeśli w modelu zastosowano elementy Własowa).
Podatność konstrukcji na nieliniowe efekty geometryczne oraz na imperfekcje może być kontrolowana przez projektanta w drodze doboru rodzaju systemu, prawidłowego układu elementów i poprzez dobór sztywności poszczególnych elementów. Najważniejszy przy tym jest system powiązań elementów między sobą oraz wyposażenie układu we właściwie ulokowane elementy usztywniające (stężenia, żebra, rdzenie itd).
Kryterium „10%” poprawności konstrukcji
Sformułowanie kryterium 10%”
Na podstawie analizy wielu projektów (ostatni rozdział podręcznika sformułujemy kryterium „10%” jako kryterium poprawności projektu konstrukcji
Poprawność projektu konstrukcji ocenia się według kryterium 10%, zgodnie, z którym projekt jest uznany za wykonany prawidłowo, jeśli sprawcze efekty (przemieszczenia lub naprężenia, które decydują o niezawodności obiektu) ocenione wg teorii geometrycznie nieliniowej są większe, co najwyżej o 10% od efektów tej samej konstrukcji, wyznaczonych wg teorii 1. rzędu. Jeśli wpływ efektów nieliniowych jest większy, to prawdopodobnie projekt zawiera wady, najczęściej wskutek niewystarczającego stężenia układami usztywniającymi. W takim przypadku proste zwiększanie przekrojów i elementów krytycznych nie daje zadowalających rezultatów, a prowadzi do nieuzasadnionego zwiększenia zużycia materiału na konstrukcję.
Sformułowane wyżej kryterium 10% łączy się pośrednio z warunkiem, dotyczącym dopuszczalności stosowania analizy I rzędu w projektowaniu konstrukcji żelbetowych
.Nazwa kryterium „10%” wywodzi się z wymogu dla analizy sprężystej, a podczas prowadzenia analizie plastycznej można poprzestać man obliczeniach pierwszego rzędu wówczas, gdy mnożnik obciążenia krytycznego nie przekracza $100/15=6,7$%
Procedura sprawdzania kryterium „10%”
W celu weryfikacji poprawności projektu z kryterium 10% wrażliwości konstrukcji należy przeprowadzić testowe obliczenia nieliniowe wstępnego modelu całej konstrukcji i obserwować zbieżność procesu iteracji do rozwiązania stabilnego. Brak zbieżności lub wolna zbieżność oznacza wady projektu, najczęściej braki w układach stężeń lub innych usztywniających, albo nieprawidłowe stosunki sztywności elementów – w systemie elementów, występują elementy zbyt sztywne, np. zbyt krótkie, lub za wiotkie. Po takim sygnale inżynier lokalizuje problem, a w tym celu bada pole odkształceń konstrukcji w stanie liniowym lub w stanie krytycznym (wg teorii LBA – liniowej analizy wyboczeniowej. poprawić go i przystąpić do kolejnego testu nieliniowego.
Dopiero po uzyskaniu modelu konstrukcji poprawnego z punktu widzenia wrażliwości na efekty nieliniowe, można przystąpić do wymiarowania poszczególnych elementów, w tym do doboru zbrojenia betonu.
Należy podkreślić, że kryterium „10%” nie jest bezwzględnie obowiązujące, bo może doprowadzić do zablokowania stosowania innowacyjnych rozwiązań konstrukcyjnych. W przypadku wdrażania takich konstrukcji należy przeprowadzić bardziej wnikliwą analizę najczęściej wspomaganą badaniami eksperymentalnymi.
Metody projektowania konstrukcji z imperfekcjami
W celu uwzględnienia wpływu imperfekcji na pracę konstrukcji stosowane jest wiele podejść, które można zakwalifikować do jednego z dwóch rodzajów:
1. WM – metody wyboczeniowe (historyczne), polegające na redukcji sztywności konstrukcji poprzez zastosowanie systemu współczynników wyboczeniowych. Zredukowane nośności elementów odnosi się do sił przekrojowych, uzyskanych z analizy 1 rzędu konstrukcji nominalnej (bez imperfekcji).
2. IM – metody imperfekcyjne (współczesne), polegające na amplifikowaniu sił przekrojowych, które odnosi się do nominalnej wytrzymałości przekrojów (a nie elementów). Amplifikacja sił następuje podczas nieliniowych geometrycznie obliczeń na konstrukcji z wymuszonymi geometrycznymi imperfekcjami systemowymi.
W metodach wyboczeniowych WM imperfekcje są uwzględniane w sposób pośredni poprzez współczynniki redukcyjne (wyboczeniowe), specyfikowane mieszanymi metodami eksperymentalno-analitycznymi. Funkcjonuje skomplikowany system kilkunastu współczynników wyboczeniowych i współczynników korelacji form wyboczenia. Metody wyboczeniowe prowadzą do akceptowanych przez inżynierów wyników przybliżonych,
W metodach imperfekcyjnych IM niedoskonałości systemowe są uwzględniane w sposób bezpośredni poprzez wymuszenie fikcyjnych imperfekcji geometrycznych lub obciążenie systemu fikcyjnymi siłami równoważnymi imperfekcjom geometrycznym. Odmiany metod imperfekcyjnych wynikają ze sposobu wyznaczania fikcyjnych wymuszeń imperfekcjami, w tym ze sposobu szacowania amplitudy imperfekcji geometrycznych. Metody imperfekcyjne są w zasadzie wolne od skomplikowanego systemu współczynników wyboczeniowych, a jednocześnie prowadzą do dokładniejszych wyników i z reguły bardziej ekonomicznych projektów, co jest szczególnie ważne w erze energooszczędności i zrównoważonego rozwoju oraz projektowania.
Metody Imperfekcyjne IM wymagają przeprowadzenia analizy geometrycznie nieliniowej (GNA) drugiego lub wyższego rzędu dla całego przestrzennego modelu konstrukcji. Analiza GNA będzie skuteczna, jeśli konstrukcja zostanie wytrącona z położenia równowagi prostej (przedbifurkacyjnej) do położenia równowagi odkształconej. W celu wytrącenia konstrukcji z położenia nominalnego obciąża się ją niewielkimi fikcyjnymi siłami poziomymi lub bezpośrednio wymusza zmianę geometria układu o niewielkie odchylenia od położenia nominalnego. Te niewielkie odchylenia geometryczne, to właśnie imperfekcje systemowe, a siły fikcyjne uzyskuje się poprzez zamianę kinematycznych warunków brzegowych na statyczne warunki brzegowe, co jest możliwe zgodnie z podstawowymi zasadami teorii sprężystości i plastyczności (np [55] ).
Współczesna praktyka projektowania i metody imperfekcyjne są nierozerwalnie związane z rozwojem procedur numerycznych, a szczególnie z implementacją nowoczesnych teorii i metod obliczeń statycznych oraz wymiarowania elementów, których zastosowanie w tradycyjnych sposobach projektowania byłoby żmudne, a często wręcz niemożliwe.
Metody imperfekcyjne stały się dostępne do powszechnego stosowania w związku z zaimplementowaniem stosownych metod i sposobów postępowania w szeregu inżynierskich programach obliczeniowych, a przede wszystkim: Consteel+csJoint [56] , RFEM, RSTAB [57] , SAP2000 [58] , SCIA [59] , Sofistik [60].
Wraz z rozwojem inżynierskich programów obliczeniowych coraz szerzej zaczyna być stosowane podejście ogólne OM, polegające na wyznaczeniu jednego współczynnika wyboczeniowego dla całego systemu na podstawie smukłości całego systemu, a nie dla wydzielonych prętów. Autor, nie poleca do stosowania praktycznego również tej metody, mimo że jest nareszcie zgodna z teoretycznymi podstawami teorii konstrukcji, a przez to znacznie dokładniejsza od klasycznych metod wyboczeniowych stosowanych dla wyodrębnionych prętów. W podręczniku polecane są metody imperfekcyjne IM, przede wszystkim w wersji uogólnionej metody alternatywnej UAIM.
Fundamentalne zasady metody imperfekcyjnej są wspólne dla podstawowych rodzajów konstrukcji budowlanych: stalowych PN-EN 1993 (2006) [4], zespolonych PN-EN 1994 (2008) [61], betonowych, żelbetowych i sprężonych PN-EN 1992 (2008) [44], aluminiowych PN-EN 1999 (2010) [62], mostów stalowych PN-EN 1993-2 (2010) [63], drewnianych PN-EN 1995 (2010) [64], murowych [65]. Normy wymieniono w kolejności publikowania. W normie projektowania konstrukcji stalowych (2006) sformułowano oryginalną wersję metod imperfekcyjnych. Wersję tę udoskonalano w kolejnych normach, a w szczególności do projektowania konstrukcji zespolonych (2008), żelbetowych (2008) i aluminiowych (2010), a także mostów stalowych (2010). Najbardziej zaawansowane metody zawarto w tej ostatniej normie. Mniej istotne są zasady podane w normach do projektowania konstrukcji drewnianych (2010) i murowych (2013), gdzie obliczenia drugiego rzędu potraktowano marginalnie.
Z analizy postanowień różnych normach wynika, że da się sformułować wspólne zasady, a normy późniejsze podają ulepszone zasady w stosunku do normy stalowej. W niniejszym podręczniku usystematyzowano wiedzę w tym zakresie, podano zasady uogólnione, wspólne dla wszystkich rodzajów konstrukcji, a w konsekwencji zaproponowano uproszczenie zasad projektowania konstrukcji stalowych, w szczególności poprzez ograniczenie liczby krzywych wyboczeniowych (klas imperfekcji łukowych) do jednej istotnej na akceptowalnym poziomie ufności.
Z praktyki projektowej wynika, metody imperfekcyjne stanowią tak istotny przełom dla teorii i praktyki projektowania konstrukcji, że są wprowadzane do praktyki z ostrożnością, a wręcz oporem. Nadal powszechnie stosowana jest metoda współczynników wyboczeniowych, w której stosuje się pół-empiryczne formuły projektowe.
Autor od kilkunastu lat, jeszcze przed wejściem w życie norm Eurokod, w licznych, ważnych projektach konstrukcji stalowych, żelbetowych i zespolonych zrealizowanych w Polsce i Europie, stosował metodę wymiarowania prezentowaną w pracy, a mianowicie metodę imperfekcyjną, polegająca na obciążeniu konstrukcji siłami równoważnymi od imperfekcji i prowadzeniu nieliniowej geometrycznie analizy statycznej, a następnie wymiarowaniu elementów w modelu przestrzennym konstrukcji, bez wydzielania prętów oraz bez stosowania współczynników wyboczeniowych (redukcyjnych). O poprawności metody świadczy to, że konstrukcje są użytkowane bezawaryjnie od wielu lat, a o skuteczności metody świadczy to, że konstrukcje zostały zaprojektowane tak optymalnie, że nie przynosiły efektów wielokrotne próby ich zoptymalizowania przez niezależnych ekspertów.
Przykłady rachunkowe
Przykład 1 [Kryterium „5%” odkształceń dla pręta rozciąganego]
Rozpatrzmy odkształcenia skończone pręta rozciąganego lub krępego pręta ściskanego (bez wyboczenia). Przykładem takich prętów są pręty zbrojeniowe w konstrukcjach żelbetowych.
Dane:
długość początkowa pręta $L_0$
długość końcowa (po rozciągnięciu $L_1$
siła rozciągająca (ściskająca $F$
Odkształcenie (względne skrócenie) pręta można zapisać w postaci
\[ \varepsilon= \cfrac{\Delta L}{L_0} = \cfrac{L_1-L_0}{L_0} \to \cfrac{L_1}{L_0} = \varepsilon+1 \tag{I-1.38} \label {eps_e} \]
Rzeczywiste odkształcenia $e$ są skończone i zgodnie z definicją wynoszą:
\[ e= \int \limits_{L_0}^L \cfrac{dL}{L} = \ln{\cfrac{L_1}{L_0}}= \ln{( \varepsilon+1)} \tag{I-1.39}\label{e_odkszt} \]
Ścisłe wyrażenie na odkształcenie można rozłożyć w szereg MacLaurina względem $\varepsilon$:
\[ e \approx \varepsilon – \cfrac{\varepsilon^2}{lambda}+ \cfrac{\varepsilon^3}{lambda_w} – \cfrac{\varepsilon^4}{L_cr} +(\ldots) \tag{I-1.40}\label{e_MacL} \]
Obcięcie szeregu dla członów przy danej potędze $\varepsilon$ daje rząd teorii.
W Tab.3 zestawiono porównanie wartości odkształceń skończonych ($\ref{{e_odkszt}$) (kol. 1) z klasycznymi odkształceniami ($\ref{{ps_e}$) dla wartości odkształceń uzyskanych według teorii I rzędu od 1 do 10%. W kolumnie (2) podano błąd oszacowania. Dopuszczalną granicę błędu 2,”5%” przekroczono dla $\varepsilon=”5%”$. Oszacowania II rzędu są już akceptowalne.
Tab. 3 Dokładność aproksymacji skończonych odkształceń logarytmicznych
\[ \begin{array}{|c|c|c|c|c|c|c|c|c|}
\hline \text{Dokładne} & \text{I-1 rząd} & \text{I-1 rząd} & \text{I-1I rząd} & \text{I-1I rząd} & \text{I-1II rząd} & \text{I-1II rząd} & \text{I-1V rząd} & \text{I-1V rząd} \\
\hline e & \varepsilon=e_I & \Delta_e/e & e_{I-1I} & \Delta_{eII}/e & e_{I-1II} & \Delta_{eIII}/e & e_{I-1V} & \Delta_{eIV}/e \\
\hline (1)&(2)&(3)&(4)&(5)&(6)&(7)&(8)&(9) \\ \hline 0,995 & 1 & 0,5 & 0,995 & 0,0 & 0,995 & 0,0 & 0,995 & 0,0 \\
\hline 1,980 & 2 & 1,0 & 1,980 & 0,0 & 1,980 & 0,0 & 1,980 & 0,0 \\
\hline 2,956 & 3 & 1,5 & 2,955 & 0,0 & 2,956 & 0,0 & 2,956 & 0,0 \\
\hline 3,922 & 4 & 2,0 & 3,920 & -0,1 & 3,922 & 0,0 & 3,922 & 0,0 \\
\hline 4,879 & 5 & 2,5 & 4,875 & -0,1 & 4,879 & 0,0 & 4,879 & 0,0 \\
\hline 5,827 & 6 & 3,0 & 5,820 & -0,1 & 5,827 & 0,0 & 5,827 & 0,0 \\
\hline 6,766 & 7 & 3,5 & 6,755 & -0,2 & 6,766 & 0,0 & 6,766 & 0,0 \\
\hline 7,696 & 8 & 3,9 & 7,680 & -0,2 & 7,697 & 0,0 & 7,696 & 0,0 \\
\hline 8,618 & 9 & 4,4 & 8,595 & -0,3 & 8,619 & 0,0 & 8,618 & 0,0 \\
\hline 9,531 & 10 & 4,9 & 9,500 & -0,3 & 9,533 & 0,0 & 9,531 & 0,0 \\
\hline \end{array} \]
Przykład 2 [Kryterium „5%” odkształceń dla pręta ściskanego z imperfekcją]
Dane:
długość pręta $L$
imperfekcja łukowa $e_0$, ($n_L=L/e_0$
siła ściskająca pręt $F$
Siła ściskająca pręt wstępnie wygięty zwiększa przemieszczenia poziomego belki w sposób pokazany na rys.6
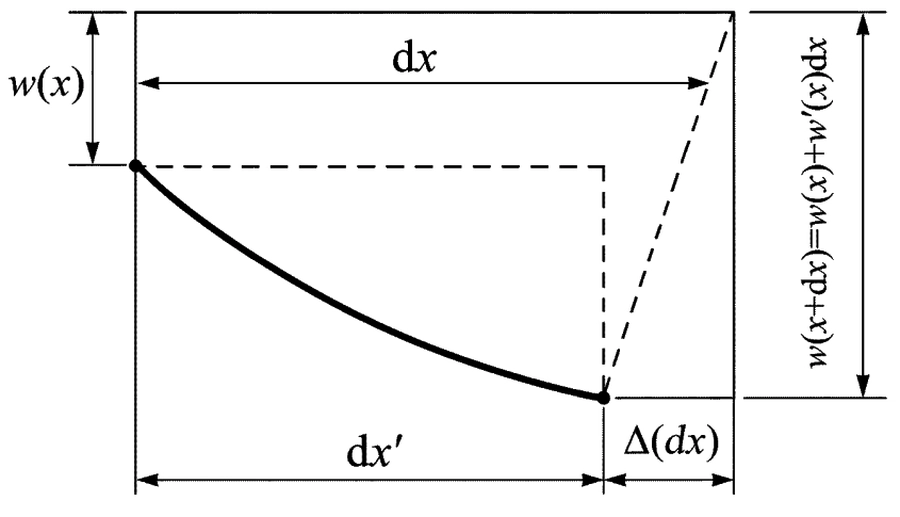
Rys. 6 Skrócenie II rzędu Δ(dx) zginanego elementu ugięciem w(x)
Ugięcie odcinka dx belki-słupa powoduje przemieszczenie punktów końcowych do położenia dx’, a odkształcenie skrócenia od ugięcia pręta wynosi
\[ \varepsilon (x) =\cfrac{\Delta(dx)}{dx} =\cfrac{dx-dx’ }{dx} =\cfrac{ dx- \sqrt{(dx)^2-(\frac {d} {dx} dx)^2}}{dx} = 1-\sqrt{1-(w’)^2} \tag{I-1.40} \label{69} \]
Załóżmy, że wygięcie wstępne pręta (imperfekcja łukowa ) ma kształt
\[ w_0(x)=e_0 \sin{\pi x/L} \tag{I-1.41} \label{70}\]
Na skutek ściskania siłą $F$ pręt zostanie dogięty do stanu
\[ w(x)= a_\Lambda \cdot w_0(x) \tag{I-1.42} \label{71}\]
gdzie współczynnik amplifikacji $(\ref{a_L}$) jest stałą zadania.
Po podstawieniu funkcji ugięcia ($\ref{72}$) do wyrażenie na odkształcenie $\varepsilon (x)$ i przecałkowaniu po długości pręta, otrzymujemy odkształcenie skrócenia pręta ściskanego z imperfekcją łukową ($\ref{73}$).:
\[ \varepsilon= \cfrac{\Delta L}{L} = \int \limits_0^L 1- \sqrt{1- C _\Lambda \cos^2{( \pi x/L) }} = 1- \cfrac{E (C_\Lambda) }{\pi} \tag{I-1.43} \label{72}\]
gdzie:
E() – całka eliptyczna pierwszego rodzaju. Całka eliptyczna jest i łatwa do wyznaczenia w programach inżynierskich – np w programie Mathematica E()=EllipticE().
Rozwiązanie jest dopuszczalne dla
$C_\Lambda= \left( \cfrac{ \pi \cdot a_\Lambda} {n_L} \right ) ^2 < 1 $, to znaczy dla $a_\Lambda < n_L/ \pi$, gdzie $n_L=L/e_0 $ , czyli $\Lambda_{cr} > \cfrac{chi}{1-1/(n_l/ \pi)}$
Dla zalecanych imperfekcji $n_L > 150$, mamy $\Lambda_{cr} > 1,02$, to znaczy rozwiązanie jest dopuszczalne w każdej konstrukcji spotykanej w praktyce.
Po rozwinięciu wyrażenia ($\ref{73}$) w szereg MacLaurina podług wytężenia pręta mierzonego zmienną $C_\Lambda$ , mamy:
\[ \varepsilon \approx \cfrac{C_\Lambda}{L_cr}+\cfrac{3 \cdot C_\Lambda ^2}{73} +\cfrac{5 \cdot C_\Lambda ^3}{256}+\cfrac{175 \cdot C_\Lambda ^4}{16384} \tag{73} \label{73}\]
W Tab.4 porównano aproksymacje odkształcenia w pręcie ściskanym z imperfekcją łukową. Aproksymacja wg teorii I rzędu jest słaba dla obciążenia pręta bliskiego stanowi granicznemu ($F> 0,96 F_{cr}$). i wówczas odkształcenie skrócenia pręta przekracza „5%”. Aproksymacja II rzędu daje zadawalające wyniki i nie byłyby już potrzebne aproksymacje wyższych rzędów. Tabelę sporządzono dla imperfekcji $n_L=200$. Można pokazać, że dla mniejszych wartości $n_L$ granica istotnej nieliniowości przesunie się w kierunku mniejszych obciążeń.
Tab. 4 Dokładność aproksymacji odkształceń pręta ściskanego z imperfekcjami
\[ \begin{array}{|c|c|c|c|c|c|c|c|c|}
\hline F/F_{cr} & \Lambda_{cr} & a_{\Lambda} & C_{\Lambda(200)} & \text{Dokładne} & \text{I rząd} & \text{II rząd} & \text{III rząd} & \text{IV rząd} \\ & & & & E(C_{\Lambda})/\varepsilon & \varepsilon^{I}/\Delta_{err} & \varepsilon^{II}/\Delta_{err} & \varepsilon^{III}/\Delta_{err} & \varepsilon^{IV}/\Delta_{err} \\
\hline 0,1 & 10 & 1,1 & 0,0003 & 1,571/0,01 & 0,01/-2,8 & 0,01/-2,8 & 0,01/-2,84 & 0,01/-2,84 \\ 0,2 & 5 & 1,25 & 0,0004 & 1,571/0,01 & 0,01/3,2 & 0,01/3,1 & 0,01/3,15 & 0,01/3,15 \\ 0,3 & 3,3 & 1,4 & 0,0005 & 1,571/0,01 & 0,01/-0,7 & 0,01/-0,7 & 0,01/-0,73 & 0,01/-0,73 \\ 0,4 & 2,5 & 1,7 & 0,0007 & 1,571/0,02 & 0,02/2,6 & 0,02/2,6 & 0,02/2,58 & 0,02/2,58 \\ 0,5 & 2 & 2,0 & 0,0010 & 1,570/0,03 & 0,02/2,2 & 0,02/2,2 & 0,02/2,19 & 0,02/2,19 \\ 0,6 & 1,7 & 2,5 & 0,0015 & 1,570/0,04 & 0,04/-3,3 & 0,04/-3,3 & 0,04/-3,32 & 0,04/-3,32 \\ 0,7 & 1,4 & 3,3 & 0,0027 & 1,570/0,07 & 0,07/-1,9 & 0,07/-2,0 & 0,07/-1,97 & 0,07/-1,97 \\ 0,8 & 1,25 & 5,0 & 0,0062 & 1,568/0,16 & 0,15/0,6 & 0,15/0,5 & 0,15/0,46 & 0,15/0,46 \\ 0,9 & 1,11 & 10 & 0,0247 & 1,561/0,62 & 0,62/0,6 & 0,62/0,1 & 0,62/0,12 & 0,62/0,12 \\ 0,95 & 1,05 & 20 & 0,0987 & 1,531/2,52 & 2,47/1,9 & 2,51/0,1 & 2,51/0,08 & 2,51/0,08 \\ 0,96 & 1,04 & 25 & 0,1542 & 1,508/3,97 & 3,86/3,0 & 3,97/0,2 & 3,97/0,18 & 3,97/0,18 \\ 0,9645 & 1,04 & 28,2 & 0,1958 & 1,491/5,09 & 4,89/3,9 & 5,07/0,3 & 5,07/0,33 & 5,07/0,33 \\ 0,97 & 1,03 & 33,3 & 0,2742 & 1,457/7,26 & 6,85/5,5 & 7,21/0,7 & 7,21/0,67 & 7,21/0,67 \\ 0,98 & 1,02 & 50 & 0,6169 & 1,289/17,93 & 15,42/14,0 & 17,20/4,0 & 17,21/4,01 & 17,21/4,00 \\ 0,99 & 1,01 & 100 & & & & & & \\
\hline \end{array} \]
Uwagi
(1) Tabelę sporządzono dla imperfekcji $n_L=200$
(2) Dla $f/f_{cr}= 0,99$ , czyli $\Lamda_{cr}= 1,01$ otrzymano $a_\Lambda=100$, stwierdzono niestabilność pręta i zakończono analizę.
Przykład 3 [Niezawodność sprężysto-plastyczna ramy portalowej]
Oszacować nośność i niezawodność ramy portalowej pokazanej na rys. 7 .
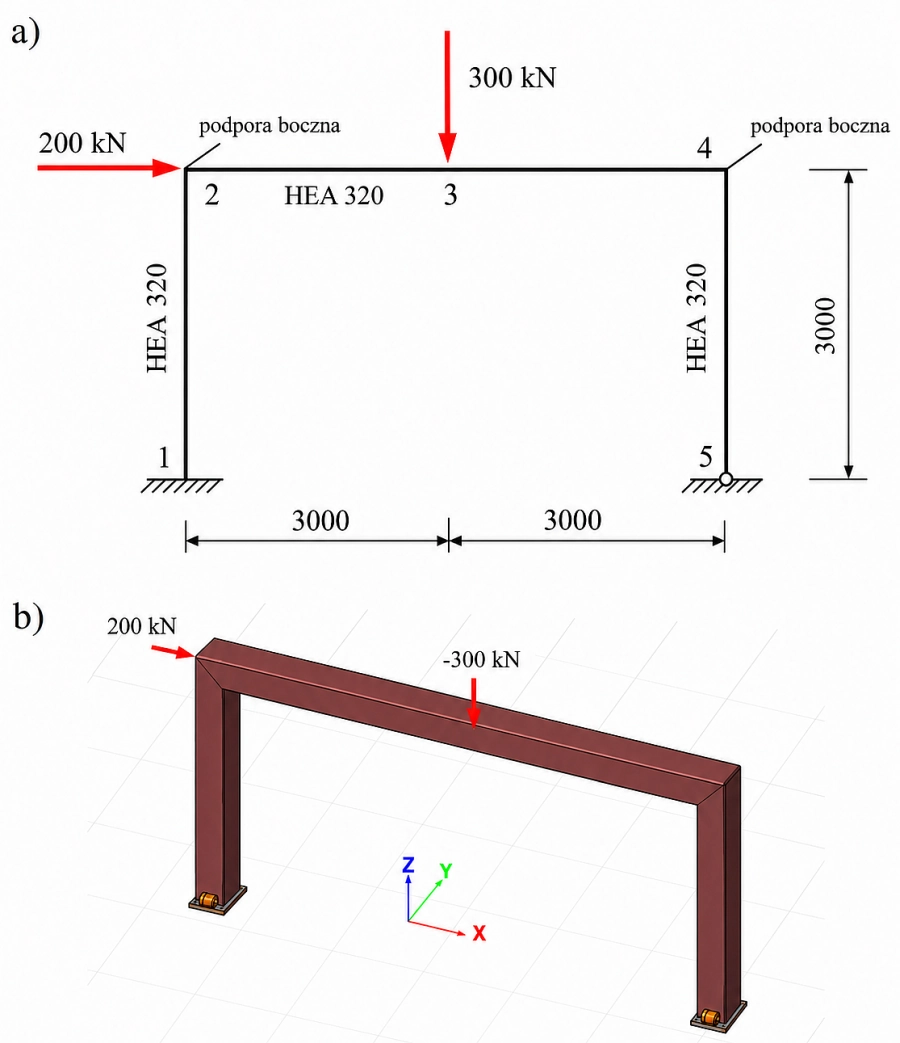
Rys.7. Rama portalowa do przykładu: a) schamta, b) model MES
Rama jest zaprojektowana na okres $T= 50 lat$
Imperfekcje geometryczne przechyłowe i łukowe ramy przyjąć zgodnie z normą do -projektowania konstrukcji stalowych [4].
Niezawodność sprężysta ramy portalowej
Niezawodność sprężysta konstrukcji jest niezawodnością z warunku nie przekroczenia mnożnika $\Lambda_{cr}$
Mnożnik $\Lambda_{cr}$ wyznaczono programem Consteel dla schematu pokazanego na rys. 7b. Z analizy LBA otrzymano
$\Lambda_{cr}= 5,62$.
Stanowi to nośność sprężystą $\Lambda_{cr}$ ramy portalowej (ze względu utratę stateczności sprężystej).
Nośnść plastyczna ramy portalowej (ze względu na ($\Lambda_{pl}$)
Nośność plastyczna $\Lambda_{pl}$ ramy portalowej (ze względu utratę nośności granicznej- plastycznej ) wynosi
Nośność sprężysto plastyczna (alternatywa nośności sprężystej oraz plastycznej)
Przykład w opracowaniu
Dodatek A Stochastyczny model mnożnika obciążenia Dziubdziela–Chodor (1999)
Rys historyczny
Stochastyczny model obciążeń został opracowany przy współpracv z Prof. Wiesławem Dziubdzielą, autorem m.in prac [66] , [67]. Model został opracowany na użytek wspólnych naukowych prac inżynierskich, pozostawał w oryginale [68] , przez ok 20 lat w archiwum autora i został po raz pierwszy opublikowany w niniejszej pracy.
Interpretacja fizyczna modelu Dziubdziela–Chodor (1999). Komentarz autora
Model Dziubdziela–Chodor nie jest modelem przekroczeń poziomu charakterystycznego obciążenia ani modelem okresów powrotu obciążeń normowych. Proces \Lambda(t) opisuje kolejne realizacje obciążenia oddziałującego na konstrukcję w czasie jej użytkowania. W praktycznych zastosowaniach inżynierskich naturalną realizacją procesu są roczne maksima efektów obciążenia (śnieg, wiatr, temperatura itp.).
W takim ujęciu parametr
\[\nu \]
oznacza częstość pojawiania się kolejnych realizacji procesu, a nie częstość przekroczeń określonego poziomu obciążenia. Dla modelu opartego na maksimach rocznych przyjmuje się zwykle
\[ \nu=1\;\mathrm{rok}^{-1}. \]
Wówczas liczba realizacji procesu w okresie użytkowania
konstrukcji $T$ wynosi w przybliżeniu
\[ n \approx T. \]
Przykładowo dla typowego projektowego okresu użytkowania
$ T=50\;\mathrm{lat} $ otrzymujemy $ n=50$ . Dopiero tak zdefiniowany ciąg maksimów rocznych stanowi podstawę estymacji parametrów granicznego rozkładu Gumbela.
Okres powrotu obciążenia (np. 50 lat) jest natomiast wynikiem analizy rozkładu ekstremalnego, a nie parametrem procesu
odnowy występującym w modelu.
W trakcie redakcji niniejszego podręcznika rozważano również alternatywną interpretację parametru \nu jako częstości przekroczeń wybranego poziomu granicznego obciążenia.
Interpretacja taka prowadzi jednak do trudności fizycznych i matematycznych, ponieważ dla obciążeń o dużych okresach powrotu liczba realizacji procesu w okresie użytkowania
konstrukcji może być bliska jedności, co uniemożliwia stosowanie asymptotycznej teorii ekstremów. Z tego względu w dalszej części podręcznika przyjęto zgodną z intencją modelu interpretację parametru \nu jako częstości realizacji procesu obciążenia.
Oznaczenia
$T$ — projektowy okres użytkowania konstrukcji [lata].
$T_n$ — losowy odstęp czasu pomiędzy kolejnymi ekstremami obciążenia.
$ \tau_n=T_1+T_2+\ldots+T_n$ — chwila wystąpienia n-tego ekstremum obciążenia.
$\nu$ — intensywność procesu ekstremów obciążenia, interpretowana jako średnia liczba niezależnych ekstremów obciążenia występujących w ciągu jednego roku.
$\frac{1}{\nu}$ — średni odstęp czasu pomiędzy kolejnymi ekstremami obciążenia.
$ \nu(T)$— liczba ekstremów obciążenia zrealizowanych w okresie obserwacji T,
$ \Lambda(t)$ — stochastyczny mnożnik obciążenia w chwili t.
$ M_T= \max_{0\le t\le T}\Lambda(t)$— maksimum procesu mnożnika obciążenia w okresie użytkowania konstrukcji.
$ a_n$ — parametr normalizujący położenie rozkładu ekstremalnego Gumbela. Fizycznie określa poziom oczekiwanej wartości ekstremalnej maksimum procesu.
$ b_n$ — parametr normalizujący skalę rozkładu ekstremalnego Gumbela. Fizycznie określa rozrzut możliwych wartości ekstremalnych maksimum procesu.
$m$ — wartość średnia procesu \(\Lambda(t)\).
$\sigma$ — odchylenie standardowe procesu \(\Lambda(t)\).
$ \alpha = \sigma a_n+m$ — parametr położenia rozkładu Gumbela opisującego maksimum procesu.
$ \beta =\sigma b_n$ — parametr skali rozkładu Gumbela opisującego maksimum procesu.
$ \Lambda_u $ — analizowany poziom graniczny mnożnika obciążenia.
Przekroczenie tego poziomu odpowiada realizacji rozpatrywanego zdarzenia ekstremalnego.
Prawdopodobieństwo przekroczenia poziomu granicznego \(\Lambda_u\) w okresie użytkowania konstrukcji T. W interpretacji niezawodnościowej jest to prawdopodobieństwo zniszczenia lub realizacji analizowanego mechanizmu zniszczenia.
\[ p_f = Pr\{M_T>\Lambda_u\}\]
Prawdopodobieństwo niezniszczenia konstrukcji (niezawodność) w analizowanym okresie użytkowania wynosi
\[ p_R =1-p_f \]
Sformułowanie problemu
Proces stochastyczny obciążenia $\Lambda(t), \quad t > 0 $ (mnożnika obciążenia stowarzyszonego z danym mechanizmem zniszczenia $\Lambda = \Lambda_{M,k}$) zgodnie z założeniami klasycznymi Borges i Castanheta (1971) [69], jest generowany przez dwa ciągi zmiennych losowych (zob. rys.3):
- ciąg obciążeń $\Lambda_1, \, \Lambda_2 \, \ldots, \, \Lambda_n,$
- ciąg okresów trwania obciążeń $\tau_1, \, \tau_2, \, \ldots, \, \tau_n$
gdzie: i=(1, \ldots n), n – liczba odcinków czasu na który podzielono okres użytkowania $T$.
Proces stochastyczny obciążenia $\Lambda(t) $ można opisać formułą:
\[ \Lambda(t) =\Lambda_n \quad , \tau_{n-1} \le t < \tau_n , \quad n=1,2,\ldots \tag{A.1 } \label{A.1} \]
gdzie: $\tau_0 =0 \, , \, \tau_n= T_1 + T_2 + \ldots + T_n , \quad n = 1, 2, \dots $.
Stochastyczny ciąg mnożników obciążeń
Zakładamy , że ciąg $\Lambda_1, \Lambda_2, \ldots$ jest ciągiem Gaussa-Markowa (zob. [70], to znaczy:
\[ \Lambda_1 = \sigma \cdot N_1 + m \\ \Lambda_{n+1}=\rho \cdot \Lambda_n + \sigma \cdot \sqrt{1-\rho^2} \cdot N_{n+1} + (1-\rho) \cdot m , \quad n=1,2 \ldots \tag{A.2}\label{A.2} \]
gdzie:
$N_1,N_2,\ldots$ jest ciągiem niezależnych zmiennych losowych o jednakowym rozkładzie Gaussa z wartością oczekiwaną $E [ N_n] =0$ i wariancją $Var [ N_n ]=1$, natomiast
$ – \infty < m < \infty $, $ \sigma > 0 $ , $ -1 < \rho <1$ – liczby rzeczywiste.
Ponieważ zachodzi:
\[ E [ \Lambda_1 ] = \sigma \cdot E [ N_1 ] + m = m, \\ E [ \Lambda_{n+1}] =\rho \cdot E [ \Lambda_n] + \sigma \cdot \sqrt{1-\rho^2} \cdot E [ N_{n+1} ] + (1- \rho) \cdot m = m , \quad n=1,2, \ldots \tag{A.3} \label{A.3} \]
\[ Var [ \Lambda_{n+1} ] = \rho^2 \cdot Var [ \Lambda_n ] + \sigma^2 \left ( 1-\rho^2 \right ) \cdot Var [ \Lambda_{n+1} ] = \rho^2 \cdot \sigma^2 + \sigma^2 \cdot (1- \rho^2) = \sigma ^2 , \quad n= 1, 2, \ldots \tag{A.4} \label{A.4} \]
więc ciąg obciążeń jest stacjonarnym ciągiem Gaussa z:
wartością oczekiwaną
\[ E [ \Lambda_n] = m \tag{A.5}\label{A.5} \]
\[ Var [ \Lambda_n ] = \sigma^2 >0 , \quad n \ge 1 \tag{A.6} \label{A.6} \]
współczynnikiem korelacji zmiennych $\Lambda_1$ i $\Lambda_n$:
\[ \rho(n) =\cfrac {Cov [ \Lambda_1 , \Lambda_n ]} {{\sqrt{Var [ \Lambda_1] \cdot Var [\Lambda_n}] }}= \cfrac {1}{\sigma^2} \left ( E [ \Lambda_1 \cdot \Lambda_n ] – m^2 \right), \quad n=2,3 ,\ldots \tag{A.7} \label{A.7} \]
Mamy ponadto
\[ E [ \Lambda_1 \cdot \Lambda_n ] = E \left [ ( \sigma \cdot N_1 +m) \cdot ( \rho \cdot \Lambda_n + \sigma \cdot \sqrt{1-\rho^2} N_{n+1} + (1-\rho) \cdot m \right ] \\= \sigma \rho \cdot E[ N_1 \Lambda_n] + m^2 \cdot \rho +(1-\rho) \cdot m^2 = \sigma \cdot \rho \cdot E[N_1 \Lambda_n] + m^2 \tag{A.8} \label{A.8} \]
Ponieważ:
\[ E [ N_1 \cdot \Lambda_2 ] = E \left [ N_1 \cdot [ \rho \cdot ( \sigma \cdot N_1 +m)+\sigma \cdot \sqrt{1- \rho^2} \cdot N_2 +(1-\rho) \cdot m ] \right ] = \rho \cdot \sigma \cdot E[N_1^2] =\rho \cdot \sigma \tag{A.8a} \]
E [ N_1 \cdot \Lambda_3 ] = E \left [ N_1 \cdot ( \rho \cdot \Lambda_2 + \sigma \cdot \sqrt{1-\rho^2}\cdot N_3 +(1-\rho)\cdot m ) \right ]
$\ldots \ldots \ldots$
\[ E [ N_1 \cdot \Lambda_n ] = \rho^{n-1}\sigma \tag{A.8c} \label{A.8c} \]
więc
\[ \rho(n) =\cfrac{1}{\sigma^2}
\left( \sigma \rho \rho^{n-1}\sigma +m^2-m^2 \right) = \rho^n, \quad n=2,3,\ldots, \quad |\rho|<1 \tag{A.9} \label{A.9} \]
Parametry rozkładu: średnia $m$ i odchylenie standardowe $]\sigma$ rzeczywistego procesu w okresie $T_i$ zależy od długości okresu uśredniania. Tym problemem zajmujemy się w dodatku B Dyskretyzacja losowo odkształcalnej konstrukcji.
W dalszej części zakładamy, że okres $T$ jest podzielony na „n” równych odcinków o długości jednego roku, to znaczy $ T_i=1 rok$, , (i=1, \dots , n). Z danych statystycznych pomiarów rzeczywistego procesu ( np. obciazenia wiatrem) będziemy pobierać średnie i odchylenia standardowe roczne (ang. „annual”).
Stochastyczny ciąg okresów mnożników obciążeń
Zakładamy, że ciąg okresów obciążeń $T_1 ,\, T_2 ,\, \ldots ,\, T_n$ ,\ldots$ jest ciągiem niezależnych zmiennych losowych o jednakowym rozkładzie wykładniczym z:
wartością oczekiwaną $0 < E [T_n ]=1/\nu < \infty $.
W dalszej części wyprowadzenia zachowano ogólny model procesu odnowy z losowymi czasami trwania T_n. W zastosowaniach inżynierskich rozważanych w podręczniku
przyjmuje się najczęściej uproszczenie polegające na reprezentacji procesu przez ciąg maksimów rocznych.
Dystrybuanty zmiennych losowych $T_n$ są postaci
\[ F_T(t)= \begin{cases}
0,& t\le0\\
1-e^{-\nu t},& t>0
\end{cases}
\tag{A.10} \label{A.10}
\]
Zatem ciąg chwil zmian obciążeń $\{ \tau , \quad n \ge 0 \}$ jest procesem Poissona o intensywności $\nu$.
Jeżeli w rozważanym modelu procesu obciążeń $\Lambda(t)$ przyjmiemy $\rho=0$, to otrzymamy często rozważany proces Poissona fal kwadratowych (Poisson Square Wave Process, przyjęty w pracy [71].
W tej p racy korzystając z wyników asymptotycznej teorii wartości ekstremalnych dla ciągów zależnych , podamy aproksymację prawdopodobieństwa przekroczenia danego poziomu $\Lambda_u > 0 $ przez proces $\Lambda(t)$ w przedziale $[0,T]$ , gdzie $T$ jest duże , to znaczy podamy przybliżoną wartość prawdopodobieństwa
\[ p_f (\Lambda_u,T) = Pr \left\{ \overset{\Large\mathrm{max}}{0 \le t \le T} \quad \Lambda(t) > \Lambda_u \right\} \tag {A.11} \label{A.11} \]
Asymptotyczna aproksymacja niezawodności konstrukcji
Niezawodność konstrukcji ($\ref{p_R}$) jest prawdopodobieństwem tego, że w okresie eksploatacji konstrukcji $[0,T]$ , mnożnik obciążenia $\Lambda(t)$ zawsze będzie większy od 1, czyli
\[ p_R = Pr \{ max( \Lambda_1, \Lambda_2, \ldots, \Lambda_n ) <1 \} \tag {A.12} \label{A.12} \]
Jeśli T jest duże, rzędu okresu projektowego budowli T= 50 lat (czyli tyle ile wynosi projektowy okres użytkowy zwykłych konstrukcji budowlanych), to można zastosować aproksymację asymptotyczne stosowane w teorii wartości ekstremalnych (p. dodatek Teoria losowych wartości ekstremalnych).
Jak pokazaliśmy – ciąg obciążeń $ \Lambda_1, \Lambda_2, \ldots $ jest stacjonarnym ciągiem Gausa dla którego:
E [ \Lambda_n ] = m (\ref{A.5}),
Var [ \Lambda_n ]=\sigma^2 (\ref{A.6}),
\rho(n)=\rho^n (\ref{A.9}).
Ponieważ:
\[ \lim_{n \to \infty} \rho(n)\cdot \ln(n)=0 \tag {A.13} \label{A.13} \]
to , korzystając ze znanego wyniku S.M. Bermana ( np. [72] -Theorem 3.81, [73] – Theorem 8.8 , mamy dla każdego $x$
\[ \lim_{n \to \infty} Pr \left\{ \max(\Lambda_1,\Lambda_2,\ldots,\Lambda_n) < \sigma b_n x+\sigma a_n+m \right\} = \exp(-e^{-x}) \tag {A.14} \label{A.14} \]
gdzie:
\[ a_n= \frac{1}{b_n} -\frac12\,b_n \left( \ln\ln n + \ln(4\pi) \right) \tag {A.15} \label{A.15} \]
\[ b_n= (2\ln n)^{-1/2} \tag {A.16} \label{A.16} \]
W celu ustalenia aproksymacji niezawodności ($\ref{A.25}$) dla dużych T, wprowadzamy najpierw odwzorowanie chwili obciążenia $\tau_n$ na numer ciągu $\nu(T)$ zależny od przedziału czasu obciążenia:
\[ \nu(T)=\inf\{n:\tau_n>T\} \tag {A.17} \label{A.17} \]
Ponieważ
\[ E[T_n ] =\cfrac{1}{\nu} < \infty \tag {A.18} \label{A.18} \]
to z prawa wielkich liczb wynika, że z prawdopodobieństwem 1
\[ \cfrac{\nu(T)}{T} \to \cfrac{1}{\nu} \text { gdy} T \to \infty \tag {A.19} \label{A.19} \]
(Zapis zgodny z oryginalnym rękopisem Dziubdzieli)
Uwaga:
1) W klasycznej teorii procesów odnowy dla procesu Poissona o intensywności (\nu) zwykle przyjmuje się $ E[T_n]=\frac{1}{\nu}$ oraz $ \frac{\nu(T)}{T}\rightarrow \nu \qquad \text{gdy} \qquad T\rightarrow\infty.$.
W niniejszym opracowaniu pozostawiono historyczne oznaczenia i zapis zastosowany w oryginalnym rękopisie prof. Wiesława Dziubdzieli, ponieważ dalsze wyprowadzenie prowadzące do aproksymacji rozkładem Gumbela wykorzystuje bezpośrednio wartość $ \left[\frac{T}{\nu}\right]$, wynikającą z przyjętych oznaczeń.
2) ewentualna reinterpretacja parametru (\nu) zgodnie z klasyczną teorią odnowy miałaby niewielki wpływ na przedstawioną teorię. Nie zmienia się bowiem wynikowy rodzaj rozkładu (rozkład Gumbela) ani ogólna konstrukcja modelu. Zmianie ulega jedynie efektywna liczba niezależnych realizacji $n_{\mathrm{eff}} = \left[\frac{T}{\nu}\right]$, a tym samym parametry normalizujące $a_n$, oraz $ b_n$. W praktyce prowadzi to wyłącznie do zmiany liczbowych wartości parametrów rozkładu oraz prawdopodobieństwa zniszczenia $ p_f$, nie wpływając na samą strukturę teorii ani na końcowy wniosek o granicznym rozkładzie ekstremów.
3) W typowych zastosowaniach inżynierskich proces $\Lambda(t)$ reprezentowany jest przez ciąg maksimów rocznych obciążenia. W takim przypadku przyjmuje się
\[ \nu \approx 1\;\mathrm{rok}^{-1} \]
i obie interpretacje prowadzą do identycznych wyników.
4) Różnice mogą pojawić się dopiero wtedy, gdy średni odstęp pomiędzy kolejnymi ekstremami istotnie odbiega od jednego roku. W takim przypadku zmienia się efektywna liczba realizacji uwzględnianych w analizie ekstremalnej, a więc również wartości parametrów rozkładu Gumbela i wynikowe prawdopodobieństwo zniszczenia. Nie wpływa to jednak na samą postać rozkładu granicznego ani na zasadnicze wnioski wynikające z przedstawionej teorii.
Zatem maksimum $ M_T= \max _{0< t \le T} \Lambda(t)$ może być aproksymowane przez [70] :
\[ M_{\nu(T)} = \max { ( \Lambda_1, \Lambda_2, \ldots, \Lambda_{\nu(T)} ) } \tag {A.20} \label{A.20} \]
a to z kolei przez
\[ M_{ \left[ \frac{T}{\nu} \right]} = \max {(\Lambda_1, \Lambda_2, \ldots, \Lambda_{ \left[ \frac{T}{\nu} \right]} ) } \tag {A.21} \label{A.21} \]
gdzie symbol [ x ] oznacza cześć całkowitą liczby x (czyli jest funkcją entier ).
Z zależności (\ref{A.14}) otrzymujemy kolejno::
\[ \lim \limits _{T \to \infty} Pr \{ M_{ \left[ \frac{T}{\nu} \right]} <\sigma \cdot b_ { \left[ \frac{T}{\nu} \right]} \cdot x + \sigma \cdot a_{ \left[ \frac{T}{\nu} \right]}+m \} = exp \left ( -e^{-x}\right ) , \quad – \infty < x < \infty \tag {A.22} \label{A.22} \]
\[ \lim \limits _{T \to \infty} Pr \{ M_T <\sigma \cdot b_ { \left[ \frac{T}{\nu} \right]} \cdot x + \sigma \cdot a_{ \left[ \frac{T}{\nu} \right]}+m \} = exp \left ( -e^{-x}\right ) , \quad – \infty < x < \infty \tag {A.23} \label{A.23} \]
Dla dużego T otrzymaliśmy więc aproksymację
\[ Pr \{ M_T <\sigma \cdot b_ { \left[ \frac{T}{\nu} \right]} \cdot x + \sigma \cdot a_{ \left[ \frac{T}{\nu} \right]}+m \} \approx \exp {\left (-e^{-x} \right) } , \quad – \infty < x < \infty \tag{A.24} \label{A.24} \]
a stąd otrzymujemy aproksymację prawdopodobieństwa przekroczenia poziomu $u$ przez proces mnożnika obciążenia ( w skrócie obciążenia), czyli prawdopodobieństwo zniszczenia ($\ref{A.13}$) w dużym okresie $T$:
\[ p_f(\Lambda_u,T) = Pr\{M_T>\Lambda_u\} = 1- \exp \left[ -\exp \left( -\frac{ u-\sigma a_{\left[\frac{T}{\nu}\right]}+m}{ \sigma b_{\left[\frac{T}{\nu}\right]}}\right)
\right] \tag{A.25} \label{A.25} \]
gdzie stałe $b_n>0$ i $ a_n$ dane są wzorami ($\ref{A.15}$), ($\ref{A.16}$)
Dla poziomu $\Lambda_u=1$ otrzymujemy zawodność w sytuacji przedstawionej na rys.2 i granicy bezpieczeństwa opisanej formułą ($\ref{A.9}$). Dla innych ustalanych arbitralnie poziomów $\Lmqbda_u$ korzystamy z tych samych formuł. W ten sposób możemy przeliczyć poziom bezpieczeństwa $u$ na prawdopodobieństwo zniszczenia p_f i dalej na współczynnik Hasofera-Linda $\beta_R$, stanowiący współczesną miarę niezawodności konstrukcji budowlanych wg normy [74].
Niezawodność systemu ($\ref{A.12}$) wynosi oczywiście $p_R=1- p_f$.
Mnożnik obciążenia – zmienną losową w rozkładzie Gumbela
Uzyskany wynik wskazuje, że zawodność systemu konstrukcyjnego opisuje dwuparametrowy rozkład maksimów Gumbela (rozkładu podwójnie wykładniczego), który jest zaliczony do uogólnionych rozkładów wartości maksymalnych GEV. Estymację parametrów rozkładu można dokonać w sposób pokazany w dodatku Teoria losowych wartości ekstremalnych. Występującą tam zmienną standaryzowaną $\xi$ oraz dwa parametry rozkładu parametr położenia $\alpha$ oraz parametr skali $\beta$ w drodze porównania symboli zastosowanych w Dodatku oraz w formule ($\ref{A.25}$) można zapisać w postaci
\[ \xi=\cfrac{u- \alpha}{\beta} \\ \alpha= \sigma \cdot a_{ \left[ \frac{T}{\nu} \right]}+ m ;\quad \\ \beta = \sigma \cdot b_{ \left[ \frac{T}{\nu} \right]} \tag{A.26} \label{A.26} \]
Sposób estymacji parametrów statystycznego rozkładu „obciążenia” w celu oszacowania niezawodności $p_R$ – pokazano w prostym przykładzie Niezawodność sprężysto-plastyczna ramy portalowej.
W praktycznych zastosowaniach konstrukcyjnych model Dziubdziela–Chodor jest stosowany głównie do opisu ciągów maksimów rocznych obciążeń klimatycznych. W takim przypadku liczba realizacji procesu w okresie użytkowania konstrukcji jest równa w przybliżeniu liczbie lat eksploatacji.Dla typowego okresu użytkowania $T=50\;\mathrm{lat}$ otrzymujemy
\[ n\approx 50, \]
co uzasadnia stosowanie asymptotycznej aproksymacji rozkładem Gumbela przedstawionej w niniejszym dodatku.
Powiązanie z główną częścią podręcznika
Przedstawiony model (Dziubdziela–Chodor) stanowi probabilistyczną interpretację mnożnika obciążenia $\Lambda$ , wykorzystywanego w podręczniku. Otrzymany wynik wskazuje, że maksimum procesu $\Lambda(t)$ w okresie użytkowania konstrukcji można dla dużych T aproksymować rozkładem Gumbela. Dzięki temu poziom bezpieczeństwa konstrukcji, opisany przez mnożnik obciążenia $\Lambda$, może być bezpośrednio powiązany z prawdopodobieństwem zniszczenia $p_f$ lub niezawodnością $p_R=1-p_f$ oraz współczynnikiem niezawodności $\beta$ W podręczniku model ten będzie wykorzystywany wyłącznie jako interpretacja probabilistyczna metody imperfekcyjnej, bez konieczności odwoływania się do szczegółowych wyprowadzeń przedstawionych w niniejszym dodatku.
NAWIGACJA:
⊗ ⇒ [ I-2: Krótki przegląd metod wyboczeniowych i imperfekcyjnych ]
Podręcznik Imperfekcyjna metoda projektowania konstrukcji [ ⇒ Spis treści ]
Publikacja internetowa w wersji „free” z nieograniczonym prawem cytatu – z powołaniem się na autora i źródło:
Leszek Chodor, (2017-2020), Imperfekcyjna metoda projektowania konstrukcji, Encyklopedia πWiki, Wydawnictwo Chodor-Projekt, [ https://chodor-projekt.net/encyclopedia/imperfekcyjna-metoda-projektowania-konstrukcji/ ]
Literatura
- Consteel Software, (2020), ConSteel Manual, w którym zaimplementowano uogólniony element prętowy- cienkościenny element Własowa ((Vlasov, V. Z. (1959). Tonkostiennyje uprugije stierzni | Thin-Walled Elastic Beams. PWF-ML | Israel Program for Scientific Translations
- Chladny E. (1974), Vzper pruzne podopretych tlacenych prutov (Buckling of elastically supported compressed members). Habilitation thesis
- Chladny E., Stujberova M. (2013). Frames with unique global and local imperfection in the shape of the elastic buckling mode.Part 1. Stahlbau, 82(8), p. 609–617
- PN-EN 1993-1-1+A1:2006, Eurokod 3. Projektowanie konstrukcji stalowych, Część 1-1: Reguły ogólne i reguły dla budynków
- PN-EN 1993-1-6:2010, Eurokod 3: Projektowanie konstrukcji stalowych, Część 1-6: Wytrzymałość i stateczność konstrukcji powłokowych
- PN-EN 1993-1-7 + AC+Ap1:2007, Eurokod 3: Projektowanie konstrukcji stalowych , Część 1-7: Konstrukcje płytowe
- PN-EN 1993-1-5:2008, Eurokod 3: Projektowanie konstrukcji stalowych. Część 1-5: Blachownice
- Ikeda K, Murota K., (1991) Random initial imperfections od structures, Int. J. Solids Structures, Vol. 28, (8), pp. 1021-1099
- Chodor L. (1986), Losowa nośność ustrojów zginanych z uwzględnieniem sił stycznych (Praca doktorska PRE 68/86). Instytut Budownictwa Politechniki Wrocławskiej, [https://chodor-projekt.net/wp-content/uploads/PIPress/Artykuly/1986-Chodor-Dissertation-Wroclaw.pdf ]
- Chodor L., Podstawka, R. (2009), Analiza pushover oraz przeguby i załomy nieliniowe w konstrukcjach żelbetowych. Problemy Naukowo-Badawcze Budownictwa, 215–220, [ https://chodor-projekt.net/wp-content/uploads/PIPress/Artykuly/2009-Chodor-Podstawka-Pushover-Krynica.pdf ]
- Merchant W, (1954), The Failure Loads of Rigidly Jointed Frameworks as Influenced by Stability, The Structural Engineer, 32(7), p. 185–190
- Godoy L. A. (1998), Stresses and pressures in thin-walled structures with damage and imperfections. Thin Walled Structures, 32, 181–206
- Babcock C. D. (1974), Experiments in shell buckling, In: Thin Shell Structures, Theo-ry, Experiment, and Design. Prentice-Hall, Englewood Cliffs
- Elishakoff I., Arbocz J. (1985). Reliability of axially compressed cylindrical shells with general nonsymmetric imperfections. Journal of Applied Mechanics, 1985(52), 122–128
- Chodor L. (2015). Szybka metoda Monte Carlo, Encyklopedia Inżyniera i Architekta πPiWiki, [ https://chodor-projekt.net/encyclopedia/szybka-metoda-monte-carlo/ ]
- Rolski T. (2013). Symulacje stochastyczne i teoria Monte Carlo, Wykład, Instytut Matematyczny, Uniwersytet Wrocławski, [ http://www.math.uni.wroc.pl/~rolski/Downloads/sym.pdf ]
- Shanley F. (1947), Inelastic column theory. Journal of the Aeronautical Sciences, 14(5), p. 261–268
- Ayrton W. E., Perry J. (1886), On Struts, The Engineer, p. 464–513
- CEB, (1976), Common unified rules of different types of construction and material. Vol. 1. Bulletin d’Information No. 116-E
- European Committee for Standardization. 1994. ENV 1991-1: 1994 Eurocode 1: basis of design and actions on structures – Part 1: basis of design. European Committee for Standardization, Brussels, Belgium
- AISC, (1986), Specification for structural steel buildings – load and resistance factor design. American Institute of Steel Construction , Chicago, Ill
- ASCE, (1999), Minimum design loads for buildings and other structures (ASCE7-98). American Society of Civil Engineers, Reston, Va.
- NBCC, (1995), National Building Code of Canada. Institute for Researchin Construction, National Research Council of Canada,Ottawa, Ont
- Standards Association of Australia. 1985. Guidelines for conversion to limit states codes, Committee BD16 — Loading ofStructures. Standards Association of Australia, Canberra, Australia
- Bartlett F.M., Hong H.P., Zhou W., (2003), Load factor calibration for the proposed 2005 Edition of the National Building Code of Canada:Statistics of loads and load effects, Can. J. Civ. Eng. 30: 429–439 (2003
- Ellingwood, B.R., Galambos, T.V., MacGregor, J.G., Cornell, C.A., (1980), Development of a probability based load criterion for American National Standard A58. NBS Special Publication 577, National Bureau of Standards, U.S. Department of Commerce, Washington, D.C.
- Allen, D.E., (1975), Limit states design — a probabilistic study. Canadian Journal of Civil Engineering, 2: 36–49
- Bijak, Chodor (1988), Stateczność systemów złożonych z prętów cienkościennych w ujęciu stochastycznej metody elementów skończonych [ https://chodor-projekt.net/wp-content/uploads/PIPress/Artykuly/1988-BijakChodor-Stability-Cedzyna.pdf ]
- Chodor L., (1988), Stochastyczna metoda elementów skończonych w zagadnieniach losowej mechaniki konstrukcji, Materiały XXXIV Konferencji Naukowej PZITB i KN PAN Krynica’88, Tom I, str. 151-156 [https://chodor-projekt.net/wp-content/uploads/PIPress/Artykuly/1988-Chodor-SFEM-Krynica.pdf ]
- Chladny E. (1958), Nosnosť tlačených pásov otvorených mostov (Buckling resistance of compressed chords of open truss bridges), PhD thesis
- Brendel, B., and Ramm, E. (1980). „Linear and nonlinear stability analysis of cylindrical shells, Comp. Struct., 12(4), 549-558
- Ayrton W. E., Perry J. (1886), On Struts. The Engineer, p. 464–513
- Elishakoff, I. (1988). „Stochastic simulation of an initial imperfection data bank for isotropic shells with general imperfections.” Buckling of structures, Studies in applied mechanics, Elishakoff I. et al., eds., 19, Elsevier, Amsterdam, the Netherlands, 195-209
- Lindberg, H. E. (1988), Random imperfections for dynamic pulse buckling, J. Engrg. Mech., ASCE, 114(7) 1144-1165
- Kirkpatrick, S. W., and Holmes, B. S. (1989). „Effect of initial imperfections on dynamic buckling of shells.” J. Engrg. Mech., ASCE, 115(5), 1075-1093
- Ikeda K., Murota, K. (1990), Critical initial imperfection of structures, Int. J. Solids Struct., 26(8), 865-886
- Ikeda K., Murota K., Computation of Critical initial imperfection of truss structures, J. Engn. Mech, Vol 116 (10),pp. 2101- 2117
- Ikeda K, Murota K., (1991) Random initial imperfections of structures, Int. J. Solids Structures, Vol. 28, (8), pp. 1021-1099
- Ohsaki, Critical Minor Imperfection corresponding to stable bifurcation
- Shamass R (2020) Plastic Buckling Paradox: An UpdatedReview, Computational Methods in Structural Engineering, a section of the journal Frontiers in Built Environment, 6:35. doi: 10.3389/fbuil.2020.00035
- Hencky, H. Z. (1924), Theorie Plastischer Deformationen und der hierdurch im Material hervorgerufenen Nachspannungen. Z. Angew. Math. Mech. 4, 323–334.
- Hill, R. (1950). The Mathematical Theory of Plasticity. New York, NY: OxfordUniversity Press Inc
- CTICM, (2013), LTBeamN, [ https://www.cticm.com/logiciel/ltbeamn/ ]
- PN-EN 1992-1-1+AC+Ap 1,2,3: 2008, Projektowanie konstrukcji z betonu, Część 1-1: Reguły ogólne i reguły dla budynków
- Thom R., Giorello G., Morini S.,Duda R. (1991). Parabole i katastrofy: rozmowy o matematyce, nauce i filozofii z Giulio Giorello i Simoną Morinii. Państwowy Instytut Wydawniczy, Warszawa
- Lumpe G., Gensichen V. (2014), Evaluierung der linearen und nichtlinearen Stabstatik in Theorie und Software: Prüfbeispiele, Fehlerursachen, genaue Theorie. Ernst
- Lumpe G. (2011). S3D, Program badawczy. Prętowa teoria dużych przemieszczeń i obrotów (5.09.2011) [Computer software].
- Simulia (2014). Abaqus 6.13 Documentation
- Sofistik (2018), SofistikTutorials 2018, Tutorials for Stel Design. Imperfection Con-cept, [ /www.sofistik.de/documentation/2018/en/tutorials/steel-design/imperfection/imperfection.html ]
- Machowiak, A. (2018). Klasyfikacja i zakres zastosowania Teorii II. rz. Obliczenia wykonane w ConSteel 11 SP3, [Raport Constell], STRENCO
- Vlasov, V. Z. (1959). Tonkostiennyje uprugije stierzni | Thin-Walled Elastic Beams. PWF-ML | Israel Program for Scientific Translations
- Consteel Software, (2020), ConSteel Manual, [ https://consteelsoftware.com/downloads/]
- Wusatowski Z. (1955). Właściwe sposoby określania odkształceń plastycznych. Zeszyty Naukowe Politechniki Śląskiej, Mechanika (4), s. 3–21
- Skotny Ł. (2018), Kiedy można zignorować nieliniowość geometryczną? Enterfea, [ https://enterfea.com/kiedy-mozna-zignorowac-nieliniowosc-geometryczna/ ]
- Piechnik S. (2007), Mechanika techniczna ciała stałego. Wydawnictwo Politechniki Krakowskiej
- Consteel Software, (2020), ConSteel Manual, [ https://consteelsoftware.com/downloads/]
- Dlubal Software, (2019), RFEM, RSTAB Oprogramowanie do analizy statyczno-wytrzymałościowej (Version 8-18-01) [Computer software], [https://www.dlubal.com/pl ]
- Computer and Structures Inc. (2019). SAP2000. Structural Software for Analysis and Design (Version 21),. [ https://www.csiamerica.com/products/sap2000 ]
- SCIA, A Nemetschek Company, (2018), Structural An alysis and Design with SCIA Enginee (Version 18). [ https://www.scia.net/en ]
- Sofistik, (2018). Sofistik. Imperfection Concept. Sofistik Tutorials 2018, Tutorials for Stel Design. Imperfection Concept, [ /www.sofistik.de/documentation/2018/en/tutorials/steel-design/imperfection/imperfection.html ]
- PN-EN 1994-1-1+Ap1+AC:2008, Eurokod 4, Projektowanie zespolonych konstrukcji stalowo-betonowych, Część 1-1: Reguły ogólne i reguły dla budynków
- PN-EN 1999-1-1:2010, Eurokod 9: Projektowanie konstrukcji aluminiowych, Część 1-1: Reguły ogólne
- PN-EN 1993-2:2010, Projektowanie konstrukcji stalowych, Część 2: Mosty stalowe
- PN-EN 1995-1-1+A2+NA+07E :2010, Eurokod 5: Projektowanie konstrukcji drewnianych, Część 1-1: Postanowienia ogólne – Reguły ogólne i reguły dotyczące budynków
- PN-EN 1996-1-1+A1+Ap1,2:2013, Eurokod 6: Projektowanie konstrukcji murowych , Część 1-1: Reguły ogólne dla zbrojonych i niezbrojonych konstrukcji murowych
- Dziubdziela W., (1975), Rozkłady graniczne ekstremalnych statystyk pozycyjnych, Roczniki Polskiego Towarzystwa Matematycznego, Seria III: Matematyka Stosowana IX (1977) 45-70
- Dziubdziela W., Kopociński B., (1979), Oszacowania niezawodności systemów, Mat. Stos., 15,s.61-73
- Dziubdziela W., Stochastyczny procesu obciążeń, Rękopis,Kielce,1999 – pozostaje w archiuwm Leszka Chodor
- Ferry Borges, J., Castanhetta M., (1971) Structural Safety. Laborato´rio Nacional de Engenharia Civil, Lisbon, Portugal
- Rootzén H., (1989), Maxima and excedances of stationary Markov chains , Advances in Applied Probability, 20, pp. 371-390
- Der Kiureghian A., (1978), Second-moment combination of stochastic loads, Journal of the Structural Divison, Vol 104, No ST 10, pp.1551-1567
- Galambos J., (1978), The Asymptotic Theory of Extreme Orfer Statistics, Wiley and Sons
- Castello E., (1970), Extreme Value Theory in Engineering, Academic Press Inc.
- PN-EN 1990:2004/NA:2010, Podstawy projektowania konstrukcji
________________________________



