
Artykuł w ciągu ostatnich 24 godzin czytało 1 Czytelników
Uwagi i recenzje podręcznika przesyłać na adres: wydawnictwo@chodor-projekt.net lub leszek@chodor-pojekt.pl
spis treści prodręcznika: [ Imperfekcyjna metoda projektowania konstrukcji ]
Część 2-3
Nawigacja: [2-2: Geneza metod imperfekcyjnych ] ⇐ ⊗ ⇒ [2:4 : Skalowanie pierwszej postaci wyboczenia ]
Formuła Ayrton-Perry (APF) [1] jest podstawą współczesnej formacji współczynników wyboczenia i zwichrzenia mimo, że została sformowana dla prostego przypadku ściskanego osiowo pręta idealnie sprężystego, obarczonego zdeterminowaną imperfekcją w postaci łukowego wygięcia. Obecnie formułę tę uogólniono na przypadek łącznego działania wyboczenia i zwichrzenia, czym zastąpiono skomplikowany układ współczynników korelacji z normy Eurokod.
Artykuł w opracowaniu
Uogólnienie formuły APF na zwichrzenie pręta
Podejście Eurokod
Maquoi i Janss (1991), [2] podjęli próbę uogólnienia formuły APF na przypadek zwichrzenia pręta w drodze skalibrowania formuły pierwotnej do wyników eksperymentalnych. W późniejszej wersji normy [3] zaimplementowano zmodyfikowaną wersję tej formuły w postaci przedstawionej w rozdziale postać Eurokod APF .Wyprowadzenie teoretyczne formuły APF na przypadek skręcania i zwichrzenia prętów podali Chapman i Buhagiar (1993) [4].
Modyfikacja Taras-Greiner
Taras i Greiner (2010) [5] zaproponowali zmodyfikowaną postać współczynnika zwichrzenia , która jest dokładniejsza niż wyrażenia podane w EC3 [3] i jednocześnie bardziej spójna z innymi zasadami projektowania prętów. Zmodyfikowaną postać uzyskano w drodze kalibracji numerycznej ogólnych krzywych normowych dla belek „testowych” pokazanych na rys. 1. Kalibrację przeprowadzono metodą GMNiA (Geometrycznie i Materiałowo Nieliniowa Analiza MES) dla belek jednoprzęsłowych zginanych równomiernie, obarczonych imperfekcją łukową $e_0 = L/1000) i wykonanych z dwuteowników europejskich, obarczonych naprężeniami resztkowymi.

Rys. 1. Przypadek „benchmark”. Założenia przyjęte w analizie GMNiA [5]– fig. 5
Krzywe teoretyczne podobne do podanych w nomie Eurokod (2-2.13) i (2-2.14) dla przypadku zwichrzenia zaproponowano w zmodyfikowanej postaci
$$\begin{equation} \chi_{LT}=\cfrac{1}{\Phi_{LT} +\sqrt{\Phi_{LT}^2 – \overline \lambda_{LT}^2}} \quad \le 1 \label {1} \end{equation}$$
$$\begin{equation} \Phi_{LT}= 0,5 \cdot \left ( 1+ \Theta_{Taras} + \overline \lambda_{LT}^2 \right ) \label{2}\end {equation}$$
gdzie zmodyfikowany (w stosunku do (2-2.15) parametr imperfekcji $\Theta_{Taras}$ wynosi
$$\begin{equation} \Theta_{Taras}=\alpha_{Taras} \cdot(\overline\lambda_z -0,2) \cdot \sqrt{\cfrac{W_{y,el}}{W_{z,el}}} \cdot \cfrac{\overline \lambda ^2_{LT}} {\overline \lambda^2_z}\label{3}\end {equation}$$
W przypadku kształtowników półzwartych klasy 3 należy dodatkowo sprawdzić warunek:
$$\begin{equation} M_{Ed}< M_{Rd}= \cfrac{W_{y,el}\cdot f_y}{\gamma_{M1}}\label{4}\end {equation}$$
Zmodyfikowane w stosunku do propozycji normy [3] współczynniki klasy imperfekcji dla kształtowników walcowanych należy przyjmować następująco:
$$\begin{equation} \alpha_{Taras} = \begin {cases}
0,16 & \text { dla } \cfrac{h}{2} \le 1,2\\
0,12 & \text { dla } \cfrac{h}{2} > 1,2
\end{cases} \label{5} \end {equation}$$
Przypomnijmy, że według obecnej normy [3] granice pomiędzy klasami imperfekcji wyznacza stosunek wymiarów przekroju $h/b=2$, a współczynniki klasy imperfekcji wynosiły: $\alpha_{LT}=0,2$ (krzywa wyboczeniowa (a)) dla niższych przekrojów oraz $\alpha_{LT}=0,2$ (krzywa wyboczeniowa (b)) dla wyższych przekrojów. Nadto w EC3 wprowadzono procedurę szczególn: $\alpha_{LT}=0,34$ (krzywa wyboczeniowa (a)) dla niższych przekrojów oraz $\alpha_{LT}=0,49$ (krzywa wyboczeniowa (b)) dla wyższych przekrojów. Modyfikacja Taras-Greiner nie przewiduje procedury szczególnej.
Uogólnienie formuły APF na zwichrzenie ze ściskaniem
Formuła Szalai-Papp
Warunki stosowania formuły APF dla wyboczenia i zwichrzenia
Szalai i Papp (2010) [6] wykazali, że uogólnienie formuły Ayrton-Perry na przypadek belki-słupa, podlegającemu wybaczaniu w dwóch kierunkach oraz zwichrzenia – można uzyskać w prostej formie analitycznej, podobnej do znanej formuły APF tylko wówczas, gdy formuła amplifikacji typu (1.12) spełnia dwa warunki:
1) liniowa Liniowość oznacza formułę amplifikacji przemieszczeniowej typu (2.2.32)
2) spójna.. Spójność polega na tym, że dla poszczególnych form niestateczności i stowarzyszonych przemieszczeń formuła amplifikacji ma identyczną postać.
W celu zachowania warunku liniowości i spójności formuły amplifikacji podczas oLTBiążania pręta wymagane jest, by wstępne imperfekcje geometryczne były ułożone w kształt zgodny z pierwszą postacią sprężystej niestateczności, Ten warunek nazwiemy warunkiem Szalai-Papp.
W konsekwencji podczas procesu obciążania pręta sprężyste przemieszczenia drugiego rzędu będą proporcjonalne do postaci imperfekcji (czyli pierwszej postaci wyboczenia) – zmienia się tylko amplituda przemieszczeń. Już w pracy [7] pokazano, że dla kształtów imperfekcji innych niż pierwsza postać zwichrzenia – formuła amplifikacji staje się nieliniowa i niespójna. W pracy [6] przeprowadzono formalny dowód powyższego warunku dla trzech przypadków historii oLTBiążenia złożonego: 1) zmienny moment zginający przy stałym ściskaniu, 2) zmienne ściskanie przy stałym zginaniu, 3) zmienny moment zginający oraz ściskanie przy zachowaniu dla oLTBiążenia jednoparametrowego ( stały stosunek zginania i ściskania).
Z warunku Szalai-Papp wynika, że stosunek amplitud wygięcia bocznego i skręcenia (a więc i impefekcji) jest stały. Według rozprawy doktorskiej Szalai [8] i pracy [9] w przypadku zwichrzenia stosunek ten wynosi:
$$ \begin {equation} i_{LT}= \cfrac{v_0}{\varphi_0} = \cfrac{M_{cr}}{N_{cr,z}}= r_0 \cdot \sqrt{\cfrac{N_{cr,x}}{N_{cr,z}}} \label {6} \end {equation}$$
Czyste siły krytyczne dla analizowanego pręta wzorcowego (belki swobodnie podpartej) można przedstawić w postaci:
$$ \begin {equation} M_{cr}= r_0 \cdot \sqrt{N_{cr,x} \cdot N_{cr,z}} \label {7} \end {equation}$$
$$ \begin {equation} N_{cr,z}=\cfrac{EI_z \pi^2}{L^2} \label {8} \end {equation}$$
$$ \begin {equation} N_{cr,x}= \cfrac{1}{r_0^2}\left( \cfrac{EI_\omega \pi^2}{L^2} +GI_T\right) \label {9} \end {equation}$$
gdzie: $M_{cr}$ moment zginający prowadzący do zwichrzenia; oraz $N_{cr,z}$, $N_{cr,x}$ – osiowe siły krytyczne przy wyboczeniu giętnym z płaszczyzny i wyboczniu skrętnym odpowiednio
W pracy [6] współczynnik ($\ref{6}$) na przyp[adek zwichrzenia ze ścikaniem LTB zapisano w postaci:
$$ \begin {equation} i_{LTB}= \cfrac{v_0}{\varphi_0} = r_0 \cdot \sqrt{ \cfrac{N_{cr,x}-N} {N_{cr,z}-N}} \label {10} \end {equation}$$
Po wprowadzeniu pojęcia giętno-skrętnego momentu krytycznego ze ściskaniem
$$ \begin {equation} M_{cr,N}=r_0\cdot \sqrt{(N_{cr,z}-N)\cdot (N_{cr,x}-N)}\label {11} \end {equation}$$
w drodze algebraicznych przekształceń ($\ref{10}$) można zapisać w postaci
$$ \begin {equation} i_{LTB} = \cfrac{M_{cr,N}}{N_{cr,z}} \cdot \cfrac{1}{1-\cfrac{N}{N_{cr,x}}} = \cfrac {M_{cr,N}}{N_{cr,z}} \cdot a_{ \Lambda,x} \label {12} \end {equation}$$
gdzie mnożniki krytyczne $\Lambda_{cr,x}$, $\Lambda_{cr,x}$ oraz współczynniki amplifikacji $a_{\Lambda,x}$ oraz $a_{\Lambda,z}$ – można wyznaczyć z zależności zależności (1-1.12), (1-1.13) ,uogólnionych na przypadek wyboczenia skrętnego i wyboczenia z płaszczyzny :
$$ \begin {equation} \Lambda_{cr,x}=\cfrac{N_{cr,x}}{N} \quad ; \quad a_{\Lambda,x}= \cfrac{1}{1-1/\Lambda_{cr,x}}\label {13} \end {equation}$$
$$ \begin {equation} \Lambda_{cr,z}=\cfrac{N_{cr,z}}{N} \quad ; \quad a_{\Lambda,z}= \cfrac{1}{1-1/\Lambda_{cr,z}}\label {14} \end {equation}$$
Związek imperfekcji bocznej i skręcenia w sytuacji LTB
Amplitudę imperfekcji skręcenia $\varphi_0$ w sytuacji LTB można uzyskać z amplitudy imperfekcji bocznej $v_0$ z wyrażenia uzyskanego z przekształcenia ($\ref{12}$) do postaci
$$ \begin {equation} \varphi_0= \cfrac {v_0} {r_0 \cdot \sqrt{ (a_{\Lambda,z} – 1) / (a_{\Lambda,x}-1)} } \label {15} \end {equation}$$
Rozwiązanie problemu korelacji niestateczności podczas ściskania ze zginaniem
W drodze czysto teoretycznych rozważań Szalai i Papp przedstawili następnie rozwiązanie fundamentalnego problemu korelacji ściskania ze zginaniem z uwzględnieniem wyboczenia giętnego oraz bocznego (zwichrzenia). Na rys.2 pokazano zastosowane oznaczenia.

Rys. 2 Model pręta w stanie zwichrzenia ( opracowano na podstawie [10] (z własnymi modyfikacjami)
Parametry problemu zwichrzenia z wyboczeniem w pracy [6] oznaczono indeksami BC ( Buckling-Compression). W literaturze (np. [11].) stosowane są indeksy LTB (Lateral-Torsional-Buckling), co lepiej oddaje problem i takie oznaczenie będziemy stosowali w niniejszym artykule.
Formułę APF dla problemu LTB daje się zapisać w postaci podobnej do równania kwadratowego Eurokod (2-2.12) dla czystego wyboczenia. Uogólnionienie na przypadek LTB (formuła Szalai-Papp) ma postać:
$$ \begin {equation} \chi_{LTB}^2 + \chi_{LTB} \cdot \left [ – \, \beta_N \, – \cfrac{1}{ \overline \lambda_{LTB}^2} \cdot \left( 1-\Theta_{LTB} \right ) \right ] +\cfrac{1}{ \overline \lambda_{LTB}^2} \beta_N = 0 \label {16} \end {equation}$$
gdzie współczynnik redukcyjny $\chi_{LTB}$ jest uogólnionym współczynnikiem wyboczeniowym-zwichrzenia na przypadek zginania ze ściskaniem, który jest zapisany formułą ($\ref{31}$) poniżej.
Równanie ($\ref{16}$) można przedstawić w równoważnej, krótszej formie da Silva (2.2.9)
$$ \begin {equation} ( \beta_N- \chi_{LTB}) \cdot (1-\overline \lambda_{LTB}^2 \cdot \chi_{LTB}) = \Theta_{LTB} \cdot \chi_{LTB} \label {17} \end {equation}$$
Zapis ($\ref{17}$) jest stosowany w pracach Giżejowskiego i in, np [11].
Uogólniony parametr imperfekcji
Uogólniony w stosunku do (2-2.10)=(2-2.3) parametr imperfekcji $\Theta_{LTB}$ wynosi:
$$ \begin {equation} \Theta_{LTB}= v_0 \cdot \cfrac{W_y}{W_\omega} \cdot \left [ a_{ \Lambda,z }+ \cfrac{ \varphi_0}{v_0} \cdot a_{ \Lambda,x } \left( \cfrac{W_\omega }{W_z} – \cfrac{GI_t}{F_{cr}} \right ) \right ] \label {18} \end {equation}$$
gdzie amplitudy imperfekcji pręta wynoszą (rys.2) :
$v_0$ – strzałka bocznego wygięcia wstępnego
$\varphi_0$ – kąt wstępnego skręcenia.
$F_{cr}=M_{cr}$
Po podstawieniu warunku Szalai-Papp ($\ref{15}$) do ($\ref{18}$) otrzymamy:
$$ \begin {equation} \Theta_{LTB}= a_{\Lambda,z} \cdot v_0 \cdot \cfrac{W_y}{W_\omega} \cdot \left [ 1+ C_1 \cdot \cfrac{a_{\Lambda,x}}{a_{\Lambda,z}} \cdot \left( \cfrac {W_\omega}{W_z} \,- \, C_2 \cdot GI_t/ N \right) \right ] \label {19} \end {equation}$$
gdzie:
$$ \begin {equation} C_1= \cfrac{1}{r_0} \cdot \sqrt{\cfrac{ (a_{\Lambda,x} -1)} {(a_{\Lambda,z} -1)}} \label {20} \end {equation}$$
$$ \begin {equation} C_2= \cfrac{1}{r_0} \cdot \sqrt{ \cfrac{(a_{\Lambda,x}- 1) \cdot( a_{\Lambda,z} -1)} { a_{\Lambda,x} \cdot a_{\Lambda,z}} } \label {21} \end {equation}$$
Współczynnik imperfekcji $\Theta_{LTB}$ zależy od:
- imperfekcji bocznej $v_0$ (i skrętnej $\varphi_0$;, ale poprzez warunek Szalai-Papp)
- charakterystyk geometrycznych przekroju belki-słupa $W_z$, $W_y$, W_\omega$ oraz $I_t$ (wskaźników wytrzymałości giętnej względem osi z, y oraz giętno- skrętnej i momentu bezwładności czystego skręcania Sant-Venanata odpowiednio;
- unormowanych (względnych) smukłości pręta $\lambda_z$, $\lambda_x$ – giętnej z płaszczyzny i skrętnej odpowiednio (pominięto klasyczne nadkreślenia);
- modułu poprzecznego (Kirchoffa) materiału $G$
- współczynników amplifikacji $a_{|Lambda,z}$ , $a_{\Lambda,x$ przy czystym wyboczeniu z płaszczyzny i skręcaniu , odpowiednio
- wartosci siły ściskającej N
Stwierdzenie zależności $\Theta_{LTB}$ od współczynników amplifikacji i siły ściskającej oznacza, że zmienia się on wraz z narastającym obciążeniem. Zależność smukłości pręta od wielkości obciążenia jest powszechnie znane (p. np. artykuł Pręty ściskane) . Współczynnik imperfekcjji przy zmierzaniu obciążenia do obciążenia krytycznego $a_{\Lambda ,x}->1)$ jest skończony , nie zalezy od $\varphi_0$ i wynosi
$$ \begin {equation} \lim_{a_{\Lambda,x} \rightarrow 1} \Theta_{LTB} = a_{\Lambda,z} \cdot v_0 \cdot \cfrac{W_y}{W_\omega} \label {22} \end {equation}$$
Należy podkreślić, że parametr imperfekcji ($\ref{19}$) wyznaczono dla $F_{cr}=M_{cr}$ w równaniu ($\ref{18}$)
W celu zachowania spójności zagadnienia LTB w tym miejscu należałoby stosować $F_{cr}= M_{cr,N}$ . Po takim podstawieniu wynik uprości się: bez mian pozostanie formuła ($\ref{19}$) oraz $C_1$ ($\ref{20}$), ale $C_2$ ($\ref{21}$)przyjmie postać
$$ \begin {equation} C_2= \cfrac{1}{r_0} \cdot \sqrt{ (a_{\Lambda,x}- 1) \cdot( a_{\Lambda,z} -1) } \label {23} \end {equation}$$
Współczynnik efektu ściskania
Współczynnik efektu ściskania $\beta_N$ został wyprowadzony w sytuacji równomiernego zginania siłami drugiego rzędu (pochodzącymi z rozwiązania II rzędu): momentem $M_y^{II} $ w kierunku głównej osi przekroju, $M_z^{II}$ w kierunku słabszej osi i ściskanych stałą siłą osiową $N_x$ , a także paczonych bimomentem $B^{II}$ .W takim stanie naprężenia w przekroju sprawczym wynoszą:
$$ \begin {equation} \sigma=\cfrac{M_y}{W_y}+ \cfrac {M_Z^{II}}{W_z}+\cfrac{B^{II}}{W_\omega}=f_y \label {24} \end {equation}$$
gdzie $M_Z^{II}$, ${B^{II}}$ są siłami obl;iczonymi wg teorii II rzędu: momentem zginającym z płaszczyzny oraz bimomentem odpowiednio
Siły drugiego rzędu od wymuszeń imperfekcji. można też oszacować w przybliżeniu z zależności:
$$ \begin {equation} M_z^{II}=M_{z,0} \cdot a_{\Lambda,z} =N\cdot v_0\cdot a_{\Lambda,z} \label {25} \end {equation}$$
$$ \begin {equation} B^{II}= \varphi_0\cdot a_{\Lambda,x} \cdot \left [ N\cdot r_0^2 -GI_T \cdot \left (1-\cfrac{1}{ a_{\Lambda,x}} \right )\right ] \label {26} \end {equation}$$
Współczynnik wpływu ściskania można obliczyć z formuły
$$ \begin {equation} \beta_N =1-n+m_z^{II}+b^{II} \label {27} \end {equation}$$
gdzie względne siły przekrojowe wynoszą:
$$ \begin {equation} n=\cfrac{N}{N_R} \quad ; m_z^{II} == \cfrac{M_z^{II}} {M_{R,z}} \quad; b^{II}=\cfrac{B^{II}}{B_R}\label {28} \end {equation}$$
Siły względne są odniesione do nośności przekroju: $N_R=N_{pl}= A \cdot f_y$, $M_{R,z}=W_z\cdot f_y$, $B_R=W_\omega\cdot f_y$,
gdzie $A$ – pole przekroju, $W_z$ – wskaźnik wytrzymałości względem osi słabszej, $W_\omega$ – wycinkowy wskaźnik wytrzymałości. giętno-skrętnej
Po podstawieniu do ($\ref{27}$) zależności ($\ref{13}$), ($\ref{14}$) i ($\ref{25}$) uzyskamy:
Krzywe niestateczności LTB
W rezultacie wykazano, że zagadnieniem wyboczenia-zwichrzenia LTB rządzi formuła APF analogiczna do (2-3.13} w postaci:
$$\begin{equation} \chi_{LTB}=\cfrac{\beta_N}{\Phi_{LTB} +\sqrt{\Phi_{LTB}^2 – \beta_N \lambda_{LTB}^2}} \label {29} \end{equation}$$
$$\begin{equation} \Phi_{LTB} = 0,5 \cdot \left( 1+ \Theta_{LTB} +\beta _N \cdot \lambda_{LTB}^2 \right) \label {30} \end{equation}$$
gdzie parametr imperfekcji $\Theta_{LTB}$ wg ($\ref{18}$).
Współczynnik niestateczności (redukcyjny) $\chi_{LTB}$ zależy od smukłości pręta $\lambda_{LTB}$
$$ \begin {equation} \lambda_{LTB} = \sqrt{\cfrac{W_y f_y}{M_{cr,N}}}\label {31} \end {equation}$$
Dla czystego zwichrzenia (N=0) zachodzi $\lambda_{LTB}=\lambda_{LT}$, a dla czystego ściskania (M=0) mamy dwa rozseparowane przypadki $\lambda_{LTB}=\lambda_y$ lub $\lambda_{LTB}=\lambda_z$. W każdym przypadku chodzi o smukłości względne, a klasyczne nadkreślenie jest pominięte.
Moment giętno-skretny ($\ref{11}$), po skorzystaniu z definicji ($\ref{13}$) i ($\ref{14}$) w postaci można uzależnić od współczynników amplifikacji (własne przedstawienie)
$$ \begin {equation} M_{cr,N}= \cfrac{N \cdot r_0}{\sqrt{(a_{\Lambda,x}-1) \cdot (a_{\Lambda,z}-1)}} \label {32} \end {equation}$$
Przykład krzywych niestateczności LTB
Dla dwóch przypadków: czystego zwichrzenia oraz interakcji zginania i ściskania dla poziomu ściskania ($\ref{28}$) $ n=0,3$ wykresy niestateczności profili szerokostopowych przedstawiono na rys. 3. Krzywe sporządzono kolejno dla przekrojów: HEM 300, HEB300, HEA300,HEAA300 (linia ciągła od grubej do cienkiej), HEM900, HEB900, HEA900, HEAA900 (linia przerywana od grubej do cienkiej).
W przypadku interakcji zginania i ściskania krzywe niestateczności mogą przyjąć zupełnie inny kształt od krzywych normowych, ale w ten sposób rozwiązano zagadnienie skomplikowanych współczynników interakcji stosowanych w normie [3] – metoda 1 i 2 ; patrz również rozdział Krótka charakterystyka metod wyboczeniowych.

Rys.3. Krzywe nistateczności dla zwichrzenia i ściskania (n=0,3) ze zwichrzeniem dla wybranych dwuteowników
Uwagi krytyczne do modelu Szalai-Papp
Współczynniki ($\ref{9}$) i ($\ref{10}$) można przedstawić w krótkiej formie po skorzystaniu z definicji ($\ref{13}$) i ($\ref{14}$) w postaci (własne przedstawienie):
$$ \begin {equation} A_{0,Szalai}= \cfrac{v_0}{\varphi_0} = r_0 \cdot \sqrt{ \cfrac { a_{\Lambda,z}-1) \cdot a_{\Lambda,x} } { (a_{\Lambda,x}-1) \cdot a_{\Lambda,z}} }\label {33} \end {equation}$$
$$ \begin {equation} A_{0,Szalai-Papp}= \cfrac{v_0}{\varphi_0} = r_0 \cdot \cfrac {a_{\Lambda,x}} {a_{\Lambda,z}} \cdot \sqrt{ \cfrac { a_{\Lambda,z}-1} { a_{\Lambda,x}-1}} \label {34} \end {equation}$$
Współczyniki ($\ref{9}$) i ($\ref{10}$), nie są tożsame, bo ich stosunek wynosi
$$ \begin {equation} \cfrac{A_{0,Szalai-Papp}}{A_{0,Szalai}}= \sqrt{ \cfrac { a_{\Lambda,x}} { a_{\Lambda,z}} }\label {35} \end {equation}$$
Różnica nie jest praktycznie istotna, a tożsamość zajdzie w szczególnym przypadku, gdy $N_{cr,z}=N_{cr,x}$ lub ogólniej gdy $(N_{cr,x}-N)/(N_{cr,z}-N) = N_{cr,x} / N_{cr,z}$. Ta „niedokładność” pozwoliła jednak na analityczne rozwiązanie problemu.
Zarówno uogólniony parameter imperfekcji $\Theta_{LTB}$ jak i współczynnik wpływu ściskania $\beta_N$ zależą od amplitud geometrycznych imperfekcji wygięcia bocznego $v_0$ i kąta skręcenia wstępnego $\varphi_0$.
Mamy tylko jedną zależność funkcyjną ($\ref{10}$) pomiędzy tymi wielkościami. W pracy Szalai-Papp [6] nie przedstawiono procedury do wyznaczenia amplitud imperfekcji, a bez tego rozwiązania zagadnienia ma ograniczoną przydatność dla praktyki, bowiem jest niejednoznaczny
Amplituda imperfekcji bocznych i skrętnych
W pracy Tankova i in. [12]. Przyjęto mianowicie, że imperfekcje z płaszczyzny $v_0$ i skrętna $\varphi_0$ można połączyć ze zmodyfikowaną imperfekcją łukową $e_0$ zdefiniowaną w normie [3], uwzględniającą również obecność naprężeń szczątkowych podjęto próbę usunięcia niejeznoznacznosci modelu Szali-Papp. Przyjęto, że nomową imperfekcję projektową $e_0$ można wyrazić w postaci:
$$ \begin {equation} e_0=v_0+\varphi_0\cdot \cfrac{h}{2} \label {36} \end {equation}$$
co zilustrowano na rys, 4.

Rys.4 związek pomiędzy imperfekcją $e_0$ oraz $v_0$ i $\varphi_0$ [12]
Autor wskzuje, że założenie ($\ref{36}$) (rys.4) określa jedynie imperfekcję boczną mierzoną w osi górnej półki w zależności od imperfekcji składowych. Możłiwe są inne podejścia. Np. w pracy [13] wskazano, że z imperfekcja boczna $e_0$ daje skręcenie wstępne $\varphi_0=e_0/h$.
Prowadzono nieliczne badania doświadczalne z jednoczesnym pomiarem imperfekcji bocznych oraz skrętnych. Na podstawie wyników badań doświadczalnych zestawionych w pracy Kalkan (2010) [14] dla serii belek żelbetowych o różnej długości $L$ i przekroju prostokątnym o różnej wysokości $h$ mierzono boczne imperfekcje $u_0$ na wysokości osi obojętnej przekroju oraz skręcenia $\varphi_0$ wokół środka przekroju. Indeks $\cfrac{\varphi_0 \cdot h}{u_0}$ .
Na podstawie tych wyników autor wykonał analizę przestawioną w tab.1, z któej wynika, że $\varphi_0= \text {(0 do 10,8)} \cdot v_0/h$, czyli średnio znacznie więcej niż założono w pracy [12] , a nawet w pracy [13].
Tab.1. Imperfekcje boczne i skrętne z badań belek żelbetowych [14]

Obszerne badania numeryczne wpływu rozmaitych modeli imperfekcji geometrycznych (bocznych i skrętnych) oraz wynikających z napreżeń resztkowych w przkrojach stalowych dwuteowników przeprowadzili Boissonnade i Somja (2012) [15]. Rozpatrzyli trzy modele naprężeń resztkowych, 3 modele stali, 11-modeli globalnych imperfekcji materiałowych różnicowanych imperfekcjami $v_0$ oraz $\varphi_0$ , w tym przedstawionych na rys. 5

Rys.5 Modele imperfakcjia nalizowane w pracy [15]
Stwierdzono, że najlepsze dopasowanie do krzywych zwichrzenia normowego dają modele pokazane na rys. 6

Rys.6 Rekomendowane imperfekcje [15]
Rekomendowana imperfekcja boczna wynosi $v_0=(11+5)=8/12000 \approx 1/1000 \cdot L$
Natomiast rekomendowana imperfekcja skrętna wynosi $\varphi_0 =L/(2000 \cdot h) \approx \cfrac{v_0}{2\cdot h}$
Jednocześnie w pracy [15] wskazano, że imperfekcje loklane (wybrzuszenia ścianek) nie mają istotnego znaczenia i mogą być pominięte.
W dalszej części tego podręcznika przyjmujemy dla cwlów porówenawczych często przyjmujemy
$$ \begin {equation} v_0=e_0 \label {37} \end {equation}$$
$$ \begin {equation} \varphi_0=\cfrac{v_0}{2 \cdot h} \label {38} \end {equation}$$
gdzie: $e_0$ jest projektową imperfekcją określoną zgodnie z normami przedmiotowymi (dla danego rodzaju konstrukcji) bądź na podstawie tolerancji wykonawczych w sposób pokazany w rozdziale Imperfekcje projektowe z odchylek wykonawczych.
Badania Tankova i in
Tankova i in (2017) [12] zweryfikowali metodę Szalai-Papp poprzez obliczenia nośności kilku schematów belek-słupów poddanych działaniu zginanie i ściskania, a także pronali z wieloma badaniami doświadczalnymi,obliczenimi numerycznymi GMNiA oraz formułami interakcji normy [3]. Potwierdzono poprawność formuły Szalai-Papp ($\ref{29}$).
Do powiązania imperfekcji bocznych $v_0$ i skrętnych $\varphi_0$ z imperfekcją projektową $e_0$ przyjęli zależność ($\ref{36}$) i przy tym założeniu wyprowadzili zmodyfikowane formuły na parametr imperfekcji $\Theta_{LTB}$ ($\ref{18}$) oraz współczynnik ściskania $\beta_N$ ($\ref{27}$).
Przyjęte założenie, zgodnie z analizą przedstawioną w punkcie wyżej – nie jest akceptowane, więc nie podajemy wyników uznanych za niepełne.
W celu uwzględnienia nierównomiernie rozłożonych momentów zginających po długości pręta, za propozycją Taras (2010) [16], zastosowano współczynnika normujący bezpośrednio współczynnik wyboczeniowy ($\ref{29}$).
W niniejszej pracy po krytycznej analizie, skorygowano rozwiązania Tankova i in [12] w ten sposób, że:
1) założenie Tankova (${36}$) , zostało zastąpione przez ($\ref{37}$)+($\ref{38}$), a w rezultacie dla równomiemego zginania pręta pozostawiono bez korekt teorię Szalai-Papp
2) uwzględnienie nierównomiernego zginania zaproponowano poprzez normalizację momentu krytycznego ($\ref{11}$) na podstawie znanych metod aproksymacyjnych , a w ogólnym przypadku w drodze rozwiązania pomocniczego zadania programem LTBeamN , w którym moment krytyczny jest obliczany ściśle dla dowolnego schematu statycznego, dowolnych obciążeń oraz stężeń po długości belki.
Uzyskany z programu LTBEamN moment krytyczny $M_{cr, LTBeam}$ może posłużyć do obliczenia współczynnika równoważnego stałego momentu $C_1$
$$ \begin {equation} C_1 =\cfrac{M_{cr, LTBeam}}{M_{cr,N} \label {39} \end {equation}$$
Znormalizowaną (względną) smukłość $\lambda_{LTB}$ ($\ref{31}$) oblicza się z użyciem momentu krytycznego $C_1 \cdot M_{cr,N}$
Takie podejście jest uzasadnione licznymi badaniami (np. Trahair (2008) [17], które wskazują na to, że moment krytyczny ($\ref{7}$)uzyskany z analizy LBA dla stałego momentu zginającego $\ref{9}$) można korygować dla innych typów rozkładu zginania poprzez zastosowanie współczynnika $C_1$,
Do obliczeni współczynnika równomiernego momentu $C_1$ można też korzystać z aprokysmacji analitycznych. W przypadku symetrycznego schematu oLTBiążeń, współczynnik $C_1$ wyznacza się ze wzoru Bijaka (2011) [18], [19], który lepiej przybliża $M{cr}$ do rozwiązania otrzymanego z MES w porównaniu od analogicznych propozycji podanych w innych pracach, np Trahair (2008) [17]:
$$ \begin {equation} C_1= \sqrt{\cfrac{21 \cdot M_0^2}{M_0^2 +6 M_2^2 + 8 M_3^2 +6 M_1^2}} \label {40} \end {equation}$$
gdzie: $M_0$, $M_2$, M_2$, M_3$ – wartości momentów zginających na belce M2, M3, M4 – momenty zginające odpowiednio dla x = 0, L/4, L/2, 3L/4.
Dalsza procedura wyznaczenia współczynnika redukcyjnego (niestateczności) przy zginaniu i ściskaniu jest zgodna z metodą Szalai-Papp i polega na kolejnym zastosowaniu zależności: ($\ref{8}$) – ($\ref{9}$) – ($\ref{11}$) -($\ref{18}$) -($\ref{27}$) -($\ref{31}$) -($\ref{30}$) -($\ref{29}$).
W pracy [12] zdefiniowano pojęcie równowaźnej imperfekcji j$e_0$ jako wynikającej z definicji parametru imperefekcji (2-2.3):
$$ \begin {equation} e_0= \Theta \cdot \cfrac{W_z}{A} = \end {equation}$$
gdzie $\Theta =\Theta_{LTB}$ ($
jako
przy czym dla zwichrzenia $e_0=v_0$
Formuła Szalai
Szalai (2017) [20] zaprezentował ogólne równanie APF rozciągnięte na dowolne przypadki obciążenia belki-słupa o przekroju symetrycznym lub niesymetrycznym.
Warunek Szalai -Papp ($\ref{10}$ przedstawiono w ogólnej postaci:
$$ \begin {equation} i_{LTB} = \cfrac{1}{r_0} \cdot \sqrt {\cfrac{N_{cr,z} – \Lambda_{cr}\cdot N} {N_{cr,x} – \Lambda_{cr} \cdot N}} = \cfrac{N_{cr,z}}{M_{cr}} \cdot \mu \label {41} \end {equation}$$
gdzie $\Lambda_{cr}$ globalny mnożnik krytyczny obciążeń konstrukcji (1-1.13), a $M_{cr}$ monet krytyczny dla czystego zwichrzenia ($\ref{7}$)
Współczynnik $mu$ oblicza się z zależnośći:
$$ \begin {equation} \mu= \sqrt{\cfrac{1-\Lambda_{cr} \cdot N/N_{cr,z}}{1-\Lambda_{cr} \cdot N/N_{cr,x}}}\label {42} \end {equation}$$
Ilustrację analizowanej sytuacji pokazano na rys. 6. , gdzie:
$N_{cr}$ – sprężyste obciążenie krytyczne pręta , przy którym zachodzi utrata stateczności w jednej z form: giętnej, skrętnej, zwichrzenia. Obciążenie krytyczne stanowi ograniczenie z góry obciążeń,
$N_R = A \cdot f_y$ – nośność na ściskanie przekroju (bez uwzględnienia utraty stateczności pręta),
$N_{lim}= N_b$ – nośność pręta,
$v_{0,eq}$ – amplituda imperfekcji równoważnej do imperfekcji normowej $e_0$ dla przypadku złożonej utraty stateczności,
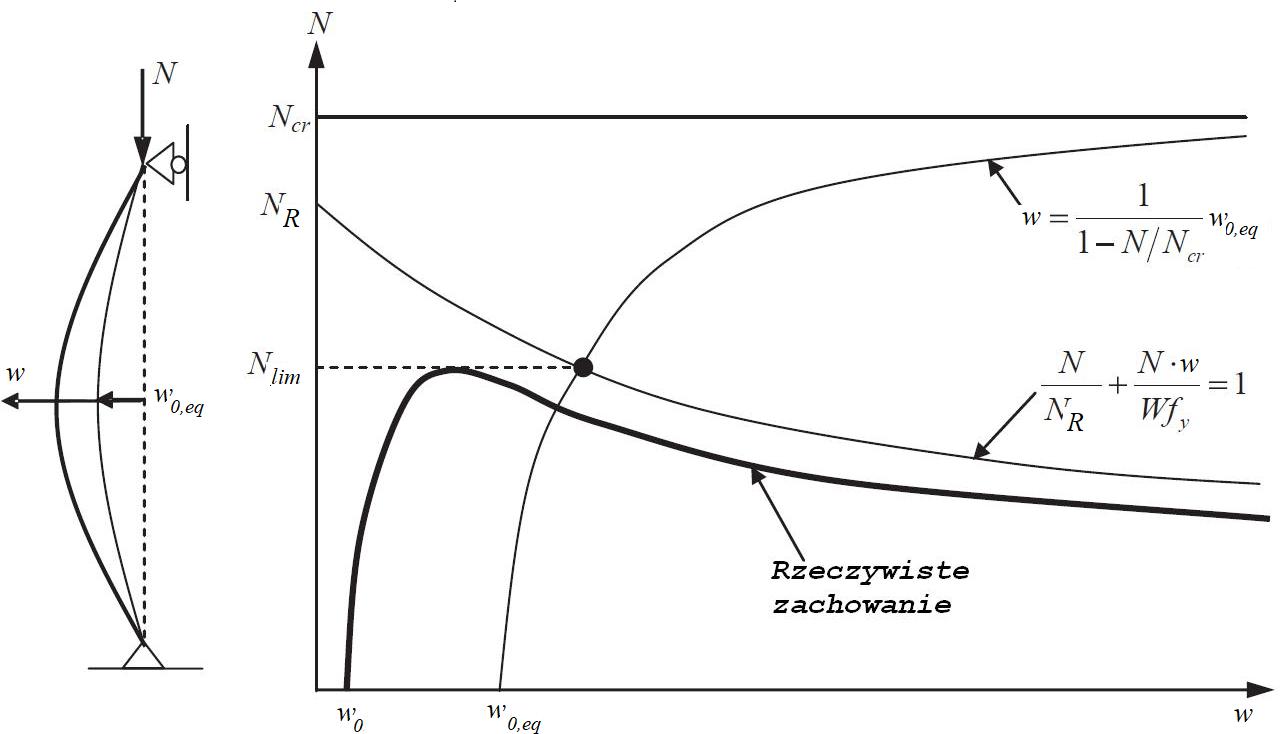
Rys. 6 Ilustracja do formuły Szalai [20]
$$ \begin {equation} [u](x) =a_\Lambda \cdot [u]_0(x) \label {43} \end {equation}$$
gdzie:
$[u]_0(x) $ imperfekcje geometryczne pręta: wstępne skrócenia $u_0 (x)=0$, wygięcia w kierunku poprzecznym do pręta $v_0(x)$, ugięcia $ w_0(x)$ oraz skręcenia $\varphi_0(x)$ ujęte w wektor
$ [u]_0 (x)= \left [ \begin{array}{l}
0 \\
v_0(x)\\
w_0(x)\\
\varphi_0(x)
\end{array} \right] $
$[u](x)$ całkowite przemieszczenie pręta w stanie II rzędu złożone z imperfekcji $[u[_0(x)$ oraz ich przyrostu wywołanego działaniem sił przekrojowych
$ [u] (x)= \left [ \begin{array}{l}
u(x) \\
v(x)\\
w(x)\\
\varphi(x)
\end{array} \right] $
Współczynnik amplifikacji $a_{\Lambda}= \cfrac{1}{1-\tfrac{1}{\Lambda_{cr}}}$ zdefiniowano w rozdziale „Imperfekcyjna metoda. Pojęcia podstawowe” wzór (1-1.12),
przy czym mnożnik krytyczny $\Lambda_{cr}$ należy wyznaczać w analizie LBA całego ustroju na modelu uwzględniającym wszystkie badane postacie wyboczenia, czyli wyboczenie giętne, skrętne i giętno-skrętne (zwichrzenie). Takim modelem jest uogólniony pręt Własowa, to znaczy pręt o siedmiu stopniach swobody z paczeniem jako siódmym stopniem.
Formuła ($\ref{41}$) jest uogólnieniem klasycznej formuły amplifikacji ($\ref{2-3.22}$) i jest analogicznie wyprowadzona. Całość wyprowadzenia można znaleźć w pracy [20].
Na rys. 5 pokazano ilustrację zagadnienia ściskania rzeczywistego pręta w nomenklaturze przyjętej w pracy [20] . Nośność $N_R$ jest nośnością przekroju na czyste ściskanie. Natomiast $N_{cr}$ jest nośnością pręta (Eulera). Definiuje się następujące mnożniki oLTBiążenia $N$:
krytyczny $\Lambda_{cr}=N_{cr}/N$ (1-1.13),
graniczny (spręzysto-plastyczny) $\Lambda_{lim}=N_{lim}/N$ (1-1.16)
przekroju (nośności plastycznej $N_R=A \cdot f_y$ , $\Lambda_R=N_R/N$
Odróżnienie tego podejścia od prezentowanego w podręczniku polega na tym, że w miejsc mnożnika plastycznego konstrukcji $\Lambda_{pl}$ (1-1.15) stosuje się nośność plastyczną przekroju $\Lambda_R$.
Kierunki rozwoju zastosowania formuły APF
Słupy-belki z bocznymi stężeniami po długości
Giżejowski i Stachura [11] zaprzentowali rozszerzoną formułę APF Tankowej [12] na przypadek elementów, które mają po rozpiętości dyskretne utwierdzenia boczne i przeciwskrętne. Współczynnik smukłości belka-słup przy różnych kombinacjach oLTBiążenia oceniano z wykorzystaniem mnożnika oLTBiążenia sprężystego wg teorii Trahair [21].
⇒ [ Alternatywna amplituda imperfekcji ]
Publikacja internetowa w wersji „free” z nieograniczonym prawem cytatu – z powołaniem się na autora i źródło:
Leszek Chodor, (2017-2020), Imperfekcyjna metoda projektowania konstrukcji, Encyklopedia πWiki, Wydawnictwo Chodor-Projekt,
[ https://chodor-projekt.net/encyclopedia/imperfekcyjna-metoda-projektowania-konstrukcji/ ]
Historia edycji artykułu:
Publikacja jest edytowana od roku 2017, pierwotnie jako podręcznik dla wydawnictwa PWN, Zakończenie edycji zostało przerwane na początku roku 2018 na skutek wypadku i rekonwalescencji autora podręcznika. Obecnie cykl artykułów składający się na podręcznik jest w trakcie edycji internetowej i jest publikowany odcinkami.
(2019-04-08 do 15) wersja 1,0: wersja pierwotna
(2019-05-27) Wersja 2.0: dokonano podziału rozdziału na części w celu poprawy procesu wczytywania strony Literatura
- Ayrton W. E., Perry J. (1886). On Struts. The Engineer, 464–513
- Maquoi R., Janss J., (1991), EC3 design model for lateral torsional buckling resistance. In: International conference on steel and aluminium structures, Singapore, 22-24 May 1991
- PN-EN 1993-1-1+A1:2006, Eurokod 3. Projektowanie konstrukcji stalowych, Część 1-1: Reguły ogólne i reguły dla budynków
- Chapman J. C., Buhagiar D. (1993), Application of Young’s buckling equation to design against torsional buckling. Proc Instn Civ Engrs Structs and Bldgs, 99, 359–369
- Taras A., Greiner R., (2010), New design curves for lateral-torsional buckling-Proposal based on a consistent derivation, Journal of Constructional Steel Research 66, pp.648-663
- Szalai J, Papp F., (2010), On the theoretical background of the generalization of Ayrton–Perry type resistance formulas, Journal of Constructional Steel Research, 66 , 670–679
- Boissonnade N, Villette M, Muzeau JP. (2001), About amplification factors for lateral-torsional buckling and torsional buckling., In: Festschrift Richard Greiner,TU Graz; 2001.
- Szalai J., (2005), Analysis of the resistance of steel beam-column on probabilistic basis, Ph.D. dissertation, Budapest University of Technology and Ekonomics
- Papp F. (2016), Buckling assessment of steel members through overall imperfection method. Engineering Structures, 106, 124–136
- Papp F. (2016). Buckling assessment of steel members through overall imperfection method. Engineering Structures, 106, 124–136, [ https://doi.org/10.1016/j.engstruct.2015.10.021 ]
- Giżejowski M. A., Stachura Z. (2017), A consistent Ayrton-Perry approach for the flexural-torsional buckling resistance evaluation of steel i-section members, Civil and Environmental Engineering Reports (CEER), 25 (2), 089-105
- Tankova T., Marques L., Simoes da Silva L., Andrade A. (2017), Development of a consistent methodology for the out- of- plane buckling resistance of prismatic beam-columns. Journal of Constructional Steel Research, 128, 839–852
- Chodor L. (2016), Przekrycia hal i galerii. W: XXXI Ogólnopolskie Warsztaty Pracy Projektanta Konstrukcji: Tom I, s. 25–202, [ https://chodor-projekt.net/wp-content/uploads/2016/03/Chodor_LPrzekrycia-hal-i-galerii-WPPK-2016.pdf ]
- Kalkan I., (2010) Application of Southwell Method on the Analysis of Lateral Torsional Buckling Tests on Reinforced Concrete Beams, Int.J.Eng.Research & Development,Vol.2,No.1,January 2010
- Boissonnade N.,, H. Somja H., (2012), Influence of Imperfections in FEM Modeling of Lateral Torsional Buckling, Proceedings of the Annual Stability Conference Structural Stability Research Council, Grapevine, Texas, April 18-21, 2012
- Taras A. (2010), Contribution to the Development of Consistent Stability Design Rules for Steel Members, PhD thesis TU Graz, 2010
- Trahair N.S., Bradford M.A., Nethercot D.A., Gardner L.: The behaviour and design of steel structures to EC3 (4th Edition), Taylor & Francis, London-New York 2008
- Bijak R.: Moment krytyczny zwichrzenia niestężonych bisymetrycznych belek dwu-teowych podpartych widełkowo. ICMS 2011 Conference, Wrocław 2011
- Bijak R., (2017), Giętno-skrętna utrata stateczności podpartych widełkowo i oLTBiążonych mimośrodowo słupów dwuteowych, Journal of Civil Engineering, Enviroment and Architecture (JCEEA), t. XXXIV, z. 64 (3/I/17), liipiec-wrzesień 2017, s. 461-470
- Szalai J. (2017). Complete generalization of the Ayrton-Perry formula for beam-column buckling problems. Engineering Structures, 153, 205–223
- Trahair N.S., (1993), Flexural-Torsional Buckling of Structures, Boca Raton, CRC Press Inc.
________________________________



