
Leszek Chodor, 23 maj 2014
2025 – 07-29 dodanie przykładów,
2025-06- 11 scalenie artykułów i naprawa po poważnej awarii portalu.
2025-11-12 zmiana układu artykułu i dodanie nowych przykładów,
2025- 12-01 wprowadzenie funkcjonalnej metody wyboru zmiennych zastępczych,
2026-01-20 wprowadzenie metody dynamicznej BSDRM
Artykuł w trakcie edycji
W przypadku nieczytelnych treści, proszę powiadomić: leszek@chodor.co
W ciągu ostatnich 24 godzin z artykułu korzystało 18 Czytelników
Niezawodność jest zdolnością obiektu do pełnienia wymaganej funkcji przez zaplanowany czas użytkowania. Awarie, rozumiane jako utrata niezawodności, stanowią jedną z przyczyn zagrożeń bezpieczeństwa, jednak nie każda awaria prowadzi do poważnych skutków lub zagrożenia. Z tego względu projektowanie bezpieczne łączy działania ukierunkowane na zwiększanie niezawodności (redukcję częstości awarii) z zastosowaniem barier bezpieczeństwa, których celem jest ograniczenie skutków awarii. W niniejszym artykule rozpatrywany jest przypadek skrajny, w którym utrata niezawodności konstrukcji budowlanej może prowadzić do katastrofalnych konsekwencji dla życia ludzkiego oraz środowiska. W takim ujęciu zasadne jest przyjęcie równoważności pojęć niezawodności i bezpieczeństwa konstrukcji budowlanej, co jest zgodne z podejściem prezentowanym w literaturze przedmiotu, np. [1].
Konstrukcje inżynierskie są systemami o bardzo wysokich wymaganiach niezawodnościowych, których praca związana jest z obszarem skrajnych wartości („ogonów”) rozkładów probabilistycznych zmiennych losowych opisujących obciążenia, nośność oraz warunki eksploatacji. Jednocześnie są to układy złożone, które z punktu widzenia teorii niezawodności mogą być modelowane jako złożone systemy szeregowo-równoległe, a także są systemami o stosunkowo małej bazie danych statystycznych, wobec realizacji jednostkowej obiektów, zróżnicowanych rozwiązaniami architektonicznymi, i środowiskowymi, technologiami projektowania i wykonania, a nawet przybliżonymi deterministycznymi modelami obliczeniowymi. W praktyce inżynierskiej metody probabilistyczne o bardzo wysokiej dokładności matematycznej często prowadzą do pozornej precyzji, nieuzasadnionej jakością danych materiałowych, geometrycznych i obciążeniowych oraz jakością wyników z modelowania duża liczbą elementów skończonych.
Celem pracy nie jest maksymalizacja matematycznej dokładności obliczeń niezawodności, lecz przedstawienie metod adekwatnych do jakości danych wejściowych i rzeczywistej dokładności modeli obliczeniowych konstrukcji budowlanych.
W pracy podano podstawy dynamicznej metody szacowania niezawodności konstrukcji BSDRM ( Binarna Metoda Dynamicznej Niezawodności 2 Rzędu) – ang Binary Second-order Dynamic Reliability Method . W metodzie BSDRM zostosowano algorytm dekorelacji Pugaczewa, która w przeciwieństwie do metod stricte numerycznych, umożliwia w modelu dynamicznym nie tylko efektywne przekształcenie zmiennych losowych, lecz także interpretację zaniku i redukcji informacji losowej w czasie, co czyni ją szczególnie użyteczną w analizie procesów degradacyjnych i ewolucyjnych.
Rozważania zilustrowano przykładami liczbowymi, a wnioski sformułowano z punktu widzenia praktyki projektanta konstruktora.
Część I Tablice projektanta. Definicje
Poniżej zestawiono tablice, które mogą być pomocne w praktycznym projektowaniu konstrukcji z uwzględnieniem kryteriów niezawodności, a także będą wykorzystywane w dalszych analizach przedstawionych w artykule. Zestawienie tabeli i pojęć poprzedzono przedstawieniem istoty analizy niezawodności konstrukcji budowlanych.
Niezawodności konstrukcji budowlanych w ujęciu inżynierskim
Początki współczesnej inżynierii niezawodności sięgają II wojny światowej, kiedy rozwijano metody analizy niezawodności komponentów elektronicznych i mechanicznych. Z czasem dyscyplina ta została uogólniona na systemy inżynierskie, w tym konstrukcje budowlane (Gniedenko, Bielajew, 1965; Murzewski, 1989; Birolini, 2017; O’Connor, Kleyner, 2012). Współczesnym standardem w analizie systemów technicznych są wymagania RAMS (Reliability, Availability, Maintainability, Safety), obejmujące niezawodność, dostępność, utrzymywalność i bezpieczeństwo. Atrybuty te wpływają bezpośrednio na użyteczność oraz koszty cyklu życia systemu.
Istota inżynierskiej analizy niezawodności
W praktyce inżynierskiej niezawodność jest mierzona współczynnikiem (indeksem) niezawodności $\beta$ (\ref{I.12}), ogólnie zdefiniowanym w (\ref{I.1}). Współczynnik $\beta$ jest alternatywną miarą niezawodności, wyrażoną w innej skali niż prawdopodobieństwo zniszczenia $p_f$ lub prawdopodobieństwo przetrwania $r=p_s=1-p_f$.
W budownictwie niezawodność oznacza, że obiekt spełnia wymagane funkcje użytkowe w określonym czasie i warunkach eksploatacji. Każda konstrukcja działa w warunkach zmiennej w czasie niepewności, a dotyczy to zarówno obciążeń, jak i właściwości materiałowe. Inżynierowie muszą uwzględniać nie tylko niezawodność, lecz także bezpieczeństwo (brak zagrożenia życia i zdrowia ludzi oraz strat materialnych), naprawialność oraz dostępność elementów konstrukcyjnych.
Na rys. 1 przedstawiono dwuwymiarową przestrzeń losową zmiennych stanu $X_1$ i $X_2$ reprezentującymi najczęściej $R-wytrzmałosć (nośność)$ i $E- obciążenia $ odpowiednio. Zmienne stanu mają wartości oczekiwane $\mu_1$, $\mu_2$ i odchylenia standardowe $\sigma_1$, $\sigma_2$. Gruba linia oznacza granicę $g( X_1, \,X_2)= 0 $ między stanami bezpiecznymi $\Omega_r$ a stanami zniszczenia $\Omega_f$. Najbardziej prawdopodobny Punkt (NPP) $\mathbf{x}^*$ służy do praktycznych obliczeń niezawodności, której miarą jest indeks $\beta$, to jest minimalna odległość granicy stanu zniszczenia środka rozkładu prawdopodobieństwa.

Eys. 1 Dwuwymiarowa przestrzeń probabilistyczna. Najbardziej prawdopodobny punkt (NPP)
Niezawodność jest ściśle powiązana z trwałością [2]. Konstrukcje budowlane, w szczególności żelbetowe, projektowane są obecnie głównie z punktu widzenia trwałości, rozumianej jako zdolność do zachowania cech użytkowych w czasie oddziaływania czynników środowiskowych (np. korozji zbrojenia, mrozu, karbonatyzacji). Procesy degradacyjne, takie jak korozja, pełzanie i relaksacja, prowadzą do zwiększenia odkształceń, pogorszenia stanów użytkowalności, a w skrajnych przypadkach również do obniżenia nośności i stateczności konstrukcji. Niezawodność i trwałość są pojęciami powiązanymi, lecz nie tożsamymi. Trwałość opisuje proces stopniowej degradacji, który nie zawsze jest klasyfikowany jako awaria aż do momentu przekroczenia granicznych wartości dopuszczalnych, określonych w przepisach technicznych.
Niezawodność dostarcza probabilistycznych informacji o częstości awarii, które – w połączeniu z oceną skutków – stanowią podstawę analizy ryzyka [3]. Z punktu widzenia zarządzania ryzykiem istotne są zarówno parametry niezawodnościowe (np. rozkład czasu do uszkodzenia), jak i ocena potencjalnych konsekwencji (straty materialne, zagrożenie zdrowia i życia).
Niezawodność jest również ściśle związana z poziomem jakości projektowania, wykonania i eksploatacji konstrukcji. Niski poziom jakości globalnej (np. błędy projektowe, wady wykonawcze, brak kontroli jakości) zwiększa prawdopodobieństwo defektów i awarii, co prowadzi do wzrostu ryzyka oraz kosztów eksploatacyjnych. Z tego względu integracja zarządzania jakością i zarządzania ryzykiem (np. metody FMEA w systemach QMS) stanowi obecnie standardową praktykę.
Bezpieczeństwo i niezawodność są podstawowymi pojęciami projektowania, realizacji i eksploatacji budowli (Verma et al., 2015). Niezawodność jest wielkością obiektywną, natomiast bezpieczeństwo ma również wymiar subiektywny, związany z postrzeganiem ryzyka. W normach budowlanych (PN-ISO 2394, EN 1990, Model Code 2010) określa się zależności pomiędzy wymaganym poziomem niezawodności, konsekwencjami zniszczenia oraz kosztami zapewnienia bezpieczeństwa.
Przejawem stopnia bezpieczeństwa w obiekcie budowlanym jest katastrofa budowlana, Przy braku katastrof budowlanych możemy wnioskować, ze obiekt jest niezawodny (i bezpieczny). Statystyki GUN pokazują, że w Polsce w 2024 r. większość katastrof była wynikiem zdarzeń losowych (82%), a najczęściej ulegały im budynki mieszkalne (39%) i konstrukcje murowe (60%). Nalży zaznaczyć, że z definicji „ Katastrofa budowlana to gwałtowne, niezamierzone zniszczenie obiektu budowlanego lub jego części„. Nie jest katastrofą uszkodzenie elementu budowlanego nadającego się do naprawy, uszkodzenie lub zniszczenie urządzeń budowlanych jak również awaria instalacji
Statystyka katastrof budowlanych prowadzonych przez Główny Urząd Nadzoru Budowlanego wskazuje, że liczba katastrof w Polsce jest znacznie mniejsza od roku 2008, w którym osiągnięto szczyt (rys. 2)

Rys. 2. Katastrofy budowlane w Polsce w latach 1996 do 2024 [4]
W 2024 roku najczęstszą przyczyna katastrof były zdarzenia losowe (82%). a w dalszej kolejności błędy podczas eksploatacji obiektu( (14%) i błędy podczas wznoszenia lub innych robót budowlanych (4%). Błędy podczas opracowania dokumentacji obiektu budowlanego wskazywano tylko w 2%. Katastrofie najczęściej ulegały budynki mieszkalne (39%), a następnie gospodarcze i inwentarskie (37%). Najczęściej ulegały katastrofie konstrukcje murowe (60%), drewniane (12%),a najrzadziej żelbetowe monolityczne (2%). Najczęściej ulegały awarii słupy, a następnie przekrycie.
Identyfikacja niezawodnościowego modelu konstrukcji budowlanych
System niezawodnościowy konstrukcji budowlanej nie jest modelem analitycznym konstrukcji, umożliwiającym bezpośrednie wyznaczenie jej odpowiedzi mechanicznej, i różni się zasadniczo od znanego inżynierom modelu mechaniki budowli. Model mechaniczny opisuje bowiem zachowanie konstrukcji w sensie fizycznym – relacje pomiędzy obciążeniami, przemieszczeniami, siłami wewnętrznymi i naprężeniami – natomiast model niezawodnościowy odnosi się do zdolności konstrukcji do spełniania wymaganej funkcji w czasie, przy uwzględnieniu niepewności oraz procesów degradacyjnych.
Podstawowa zasada identyfikacji układów mówi, że nie można identyfikować układu całkowicie nieznanego (Schweppe F. C., Uncertain Dynamic Systems, Prentice Hall, 1973; wyd. pol. Układy dynamiczne w warunkach losowych, WNT, 1978). W przypadku konstrukcji budowlanych na etapie projektowania model fizyczny nie jest jeszcze znany w sensie eksperymentalnym, ponieważ każda konstrukcja stanowi indywidualny egzemplarz projektowany i wznoszony według konkretnego projektu, a nie obiekt seryjny podlegający klasycznej identyfikacji doświadczalnej. Z tego względu identyfikacja niezawodnościowego systemu konstrukcji musi zostać przeprowadzona na podstawie analitycznego modelu mechanicznego.
Model mechaniczny jest opracowywany przez inżyniera zgodnie z wymaganiami norm, na podstawie teorii mechaniki budowli, z uwzględnieniem warunków brzegowych (podpór), najczęściej z wykorzystaniem Metody Elementów Skończonych, obciążeń wyznaczonych zgodnie z normami Eurokod 1, imperfekcji geometrycznych dopuszczonych normą PN-EN 1090-2 oraz imperfekcji materiałowych deklarowanych przez producentów wyrobów. Na zdefiniowaniu takiego modelu mechanicznego kończy się zasadnicza praca inżyniera projektanta.
Wykazanie, że zaprojektowana konstrukcja spełnia wymagania niezawodnościowe w całym projektowym okresie użytkowania, realizowane jest już przez algorytmy numeryczne. Projektant, po otrzymaniu informacji zwrotnej o poziomie niezawodności konstrukcji, może dokonać korekt projektu i przekazać zmodyfikowany model mechaniczny do ponownej oceny.
Procedura identyfikacji modelu niezawodnościowego polega na algorytmicznej rekonstrukcji modelu systemowego, która może zostać przeprowadzona automatycznie, bez dalszego udziału inżyniera. Proces ten obejmuje kolejno identyfikację modelu logicznego, a następnie modelu probabilistycznego konstrukcji. Takie ujęcie prowadzi do rozwiązania interdyscyplinarnego, obejmującego:
- model obliczeniowy mechaniki budowli,
- model logiki systemowej,
- model probabilistyczny niezawodności.
Podczas identyfikacji modelu probabilistycznego prowadzona jest algorytmiczna rekonstrukcja modelu systemowego, która składa się z następujących etapów:
- budowy modelu obliczeniowego mechaniki budowli (np. MES),
- wyznaczenia modelu logiki systemowej (minimalne cięcia, minimalne ścieżki, struktura systemu),
- definicji modelu probabilistycznego niezawodności systemu konstrukcyjnego.
Najważniejszym i twórczym etapem pozostaje zbudowanie poprawnego modelu mechanicznego przez inżyniera. Kolejne etapy – identyfikacja struktury logicznej oraz wyznaczenie miar niezawodności – są realizowane automatycznie przez algorytmy numeryczne, opracowane w ramach teorii niezawodności i zaimplementowane w narzędziach obliczeniowych.
Model mechaniczny konstrukcji
Model mechaniczny konstrukcji (np. metody sił, przemieszczeń lub Metody Elementów Skończonych) jest rozumiany jako deterministyczny operator mechaniczny, który można zapisać w postaci
$\mathcal{F}:\mathbf{X}\mapsto\mathbf{u}(\mathbf{X})$,
gdzie $\mathbf{X}$ jest wektorem parametrów stanu konstrukcji (geometria, właściwości materiałowe, obciążenia, imperfekcje, parametry degradacji), a $\mathbf{u}$ jest wektorem odpowiedzi konstrukcji (przemieszczenia, siły wewnętrzne, reakcje podpór, naprężenia).
Zakłada się, że inżynier budowlany posiada pełną wiedzę w zakresie budowy i interpretacji modelu mechanicznego. Operator $\mathcal{F}$ nie zawiera jednak żadnej jawnej informacji logicznej o systemie niezawodnościowym. Informacja ta pojawia się dopiero po nałożeniu kryteriów granicznych oraz analizie odpowiedzi konstrukcji na kontrolowane modyfikacje stanu.
Model logiczny konstrukcji
Na odpowiedzi mechaniczne $\mathbf{u}$ nakłada się zbiór kryteriów granicznych
$g_k(\mathbf{u})>0$ – stan dopuszczalny,
$g_k(\mathbf{u})\le 0$ – utrata funkcji,
gdzie $k=1,\ldots,K$ numeruje kryteria (nośność, użytkowalność, stateczność i inne).
Wprowadza się binarny obserwator systemu
$\Phi(\mathbf{X})={0\ \text{gdy}\ \forall k:\ g_k(\mathbf{u}(\mathbf{X}))>0;\ 1\ \text{gdy}\ \exists k:\ g_k(\mathbf{u}(\mathbf{X}))\le 0}$,
który informuje wyłącznie o tym, czy konstrukcja spełnia funkcję, czy ją traci. Na tym etapie nie istnieje jeszcze żadna struktura logiczna systemu — jedynie relacja wejście–wyjście pomiędzy modelem mechanicznym a decyzją o spełnieniu funkcji.
Wektor degradacji i wektor stanu logicznego
Komputer konstruuje zbiór elementarnych akcji degradacyjnych
$D_i\in{0,1}$, $i=1,\ldots,m$,
gdzie $D_i=1$ oznacza wystąpienie określonego procesu degradacyjnego (np. redukcji sztywności, ubytku przekroju, wzrostu oddziaływań), a $D_i=0$ – jego brak.
Wektor $\mathbf{D}=(D_1,\ldots,D_m)$ parametryzuje modyfikacje modelu mechanicznego i definiuje konkretny scenariusz degradacji. Odpowiedź konstrukcji na zadany wektor degradacji jest mapowana przez obserwator $\Phi$ na binarny stan logiczny systemu, co prowadzi do funkcji
$\Phi:{0,1}^m\rightarrow{0,1}$, która nie jest zadana explicite, lecz obserwowana empirycznie.
Odpowiedź konstrukcji na zadany wektor degradacji $\mathbf{D}$ jest mapowana przez obserwator $\Phi$ na binarny stan logiczny systemu. Wektor ten opisuje faktyczne stany logiczne mechanizmów wynikające z odpowiedzi mechanicznej konstrukcji. W ten sposób powstaje funkcja logiczna systemu
Dla degradacji konstrukcyjnych spełniona jest własność monotoniczności
$\mathbf{D}\le\mathbf{D}’\Rightarrow\Phi(\mathbf{D})\le\Phi(\mathbf{D}’)$,
co oznacza, że dodatkowa degradacja nie może poprawić stanu systemu. Własność ta umożliwia algorytmiczne wnioskowanie o strukturze logicznej systemu bez znajomości semantyki poszczególnych mechanizmów.
Struktura logiczna jako własność emergentna
Struktura logiczna systemu niezawodnościowego nie jest ani narzucona przez inżyniera, ani zapisana w modelu mechanicznym, lecz emergentnie wyłania się z relacji pomiędzy degradacjami a odpowiedzią konstrukcji. Na tej podstawie komputer rekonstruuje minimalne warunki zniszczenia (minimalne cięcia) oraz minimalne warunki zachowania funkcji (minimalne ścieżki), bez udziału inżyniera.
Model probabilistyczny i ujęcie dynamiczne
Model dynamiczny
Po zrekonstruowaniu binarnych zmiennych stanu oraz minimalnych cięć i ścieżek komputer może, bez udziału inżyniera, zastosować: stochastyczne procesy degradacji konstrukcji ( procesy Markowa ) oszacowania drugiego rzędu Bahadura, metodę Ditlevsena–Madsena, analizę korelacji i stowarzyszenia, i wreszcie dynamiczną ocenę $\tilde{\beta}(t)$ .
W przedstawionym w pracy podejściu dynamicznym BSDRM (Binary Second-Order Dynamic Reliability Method) stan każdego mechanizmu jest modelowany w sposób naturalnie trójstanowy jako proces Markowa $X_i(t)\in{N,\, U,\,W}$. Dla potrzeb logiki systemowej i oszacowań niezawodności stany te są rzutowane na zmienne binarne, co zapewnia jednocześnie realizm opisu degradacji i formalną spójność analizy systemowej.
Klasyczne, normowe podejścia statyczne FORM/SORM są są w niniejszej pracy traktowane jako metoda historyczna, poprzedzająca metodę dynamiczną.
Znaczenie identyfikacji niezawodnościowej w praktyce inżynierskiej
Przedstawiona w niniejszym rozdziale procedura identyfikacji niezawodnościowego modelu konstrukcji budowlanej prowadzi do istotnego wniosku metodologicznego: model niezawodnościowy nie jest niezależnym modelem konstrukcji, lecz strukturą wtórną, rekonstruowaną algorytmicznie na podstawie poprawnie zdefiniowanego modelu mechanicznego oraz przyjętych kryteriów granicznych. Odpowiedzialność inżyniera koncentruje się zatem na rzetelnym opisie zachowania konstrukcji w sensie mechanicznym, natomiast identyfikacja struktury niezawodnościowej może zostać przeprowadzona w sposób zautomatyzowany. Z inżynierskiego punktu widzenia kluczowe znaczenie ma fakt, że logika systemu niezawodnościowego nie jest narzucana apriorycznie, lecz wyłania się jako własność emergentna relacji pomiędzy degradacjami, odpowiedzią konstrukcji oraz kryteriami granicznymi. Minimalne cięcia, minimalne ścieżki oraz zależności pomiędzy mechanizmami zniszczenia nie są elementem subiektywnej decyzji projektanta, lecz wynikiem obiektywnej analizy zachowania konstrukcji pod wpływem kontrolowanych modyfikacji stanu.
Rozdział ten stanowi bezpośrednie przygotowanie do dalszych części pracy, w których zidentyfikowana struktura systemowa zostaje sprzężona z ewolucją czasową, procesami degradacji i zdarzeniami wyjątkowymi. Umożliwia to przejście od klasycznej, statycznej oceny bezpieczeństwa do dynamicznej analizy niezawodności konstrukcji w całym cyklu jej użytkowania.
Zmienne losowe
W tab. 1 zestawiono podstawowe pojęcia i parametry zmiennych losowych stosowane w artykule.
Tab. 1. Parametry zmiennych losowych
\[ \begin{array}{c|l|l|l}
\hline \text{Nazwa} & \text{Oznaczenie} & \text{Definicja} & \text{Uwagi} \\
\hline (1) & (2) & (3) & (4) \\
\hline \text{Dystrybuanta} & F_X(x)& F_X(x)=\operatorname{Prob}\{X\le x\}& \lim_{x\to-\infty}F_X(x)=0,\ \lim_{x\to+\infty}F_X(x)=1 \\
\hline \text{Gęstość rozkładu} & f_X(x) & F_X(x)=\displaystyle\int_{-\infty}^{x} f_X(t)\,dt & f_X(x)\ge 0,\ \displaystyle\int_{-\infty}^{+\infty} f_X(x)\,dx=1 \\
\hline \text{p-kwantyl} & x_p & x_p=F_X^{-1}(p) & F_X(x_p)=p,\ \text{wartość zmiennej rzędu } p \\
\hline \text{Dominanta}
& x_d & x_d=\arg\max_x f_X(x)& \text{najczęściej występująca wartość} \\
\hline \text{Wartość oczekiwana}& \mathbb{E}[X] & \mathbb{E}[X]=\displaystyle\int_{-\infty}^{+\infty} x\,f_X(x)\,dx& \text{średnia} \\
\hline\text{Moment rzędu } k & m_k & m_k=\mathbb{E}[X^k]& \text{jeżeli istnieje} \\
\hline \text{Moment centralny rzędu } k & \mu_k & \mu_k=\mathbb{E}[(X-\mathbb{E}[X])^k] & \mu_2=\operatorname{Var}(X) \\
\hline \text{Wariancja} & \operatorname{Var}(X) & \operatorname{Var}(X)=\mathbb{E}[X^2]-\mathbb{E}^2[X] & \operatorname{Var}(X)=0\Rightarrow X=\mathbb{E}[X] \\
\hline \text{Współczynnik zmienności} & v_X & v_X=\dfrac{\sigma_X}{\mathbb{E}[X]}& \text{miara względna} \\
\hline \text{Współczynnik skośności}& \gamma_1 & \gamma_1=\dfrac{\mu_3}{\sigma_X^3} & \text{asymetria rozkładu} \\
\hline \text{Współczynnik spłaszczenia} & \gamma_2 & \gamma_2=\dfrac{\mu_4}{\sigma_X^4} & \text{nadmiarowe: } \gamma_2-3 \\
\hline \text{Warunkowa wartość oczekiwana} & \mathbb{E}[Y\mid X] & \mathbb{E}[Y\mid X=x]=\displaystyle\int_{-\infty}^{+\infty} y\,f_{Y|X}(y|x)\,dy
& \text{zależna od } x \\
\hline \end{array}\]
Uwagi do Tab. 1:
1) Ciągłość / dyskretność
W przypadku zmiennych losowych odcinkami ciągłych całki należy rozumieć jako sumy całek po przedziałach ciągłości. Dla zmiennych dyskretnych całki zastępuje się odpowiednimi sumami.
2) Jednoznaczność opisu rozkładu
Jeżeli istnieje gęstość rozkładu $f_X(x)$, to jednoznacznie wyznacza ona rozkład zmiennej losowej, a tym samym jej dystrybuantę $F_X(x)$.
3) Istnienie momentów
Momenty rozkładu (wartość oczekiwana, wariancja, momenty wyższych rzędów) istnieją tylko wtedy, gdy odpowiadające im całki są zbieżne.
4) Interpretacja wariancji
Jeżeli $\operatorname{Var}(X)=0$, to zmienna losowa $X$ jest prawie na pewno stała, tj. $\operatorname{Pr}\{X=\mathbb{E}[X]\}=1$.
5) Kwantyle i zastosowania inżynierskie
Kwantyle rozkładu są podstawowym narzędziem w analizach niezawodności konstrukcji. W szczególności współczynnik niezawodności $\beta$ (w tym współczynnik Hasofera-Linda $\beta_{HL}$ oraz stosowany w pracy sprowadzony $\widetilde{\beta}$ ) jest kwantylem rozkładu normalnego.
6) Współczynniki kształtu rozkładu
Współczynniki skośności i spłaszczenia są bezwymiarowymi miarami kształtu rozkładu i są wykorzystywane m.in. w metodzie momentów oraz w analizie ekstremów.
7) Warunkowa wartość oczekiwana
Warunkowa wartość oczekiwana stanowi podstawę opisu zależności stochastycznych oraz analizy systemów losowych i procesów niezawodności.
W tab 2 . zestawiono najczęściej stosowane w budownictwie rozkłady zmiennych losowych ciągłych.
Tab. 2 Wybrane rozkłady jednowymiarowych zmiennych losowych ciągłych w teorii niezawodności konstrukcji
\[ \begin{array}{c|l|l|l|l|l|l}
\hline \text{Typ rozkładu} & \text{Gęstość} & \text{Dystrybuanta} & \text{Oczekiwana} & \text{Wariancja} & \text{Asymetria} & \text{Spłaszczenie} \\
\hline \text{Typ rozkładu} & f_X(x) & F_X(x) & \mathbb{E}[X] & \operatorname{Var}(X) & \operatorname{Skew}[X] & \operatorname{Kurt}[X] \\
\hline \text{(1)} & (2) & (3) & (4) & (5) & (6) & (7) \\
\hline \text{Normalny (Gauss)} & \dfrac{1}{\sigma\sqrt{2\pi}}\exp\!\left(-\dfrac{(x-\mu)^2}{2\sigma^2}\right) & \Phi\!\left(\dfrac{x-\mu}{\sigma}\right) & \mu & \sigma^2 & 0 & 0 \\
\hline \text{Gauss ucięty }[a,b] & \dfrac{f_X(x)}{\Phi\!\left(\dfrac{b-\mu}{\sigma}\right)-\Phi\!\left(\dfrac{a-\mu}{\sigma}\right)} & \dfrac{\Phi\!\left(\dfrac{x-\mu}{\sigma}\right)-\Phi\!\left(\dfrac{a-\mu}{\sigma}\right)}{\Phi\!\left(\dfrac{b-\mu}{\sigma}\right)-\Phi\!\left(\dfrac{a-\mu}{\sigma}\right)} & \text{z definicji} & \text{z definicji} & \neq 0 & \neq 0 \\
\hline \text{Log-normalny} & \dfrac{1}{x\sigma\sqrt{2\pi}}\exp\!\left(-\dfrac{(\ln x-\mu)^2}{2\sigma^2}\right) & \Phi\!\left(\dfrac{\ln x-\mu}{\sigma}\right) & \exp\!\left(\mu+\dfrac{\sigma^2}{2}\right) & \left(e^{\sigma^2}-1\right)e^{2\mu+\sigma^2} & \neq 0 & \neq 0 \\
\hline \text{ Gamma }(k,\theta) & \dfrac{1}{\Gamma(k)\theta^k}x^{k-1}e^{-x/\theta} & \dfrac{\gamma(k,x/\theta)}{\Gamma(k)} & k\theta & k\theta^2 & \dfrac{2}{\sqrt{k}} & \dfrac{10}{k} \\
\hline \text{Beta }(\alpha,\beta) & \dfrac{1}{B(\alpha,\beta)}x^{\alpha-1}(1-x)^{\beta-1} & \dfrac{B(x;\alpha,\beta)}{B(\alpha,\beta)} & \dfrac{\alpha}{\alpha+\beta} & V_B^{(7)} & S_B^{(7)} & K_B^{(7)} \\
\hline \text{Gumbel max} & \dfrac{1}{\beta}\exp(-z-e^{-z}) & \exp(-e^{-z}) & \alpha + C_E\beta & \dfrac{\pi^2}{10}\beta^2 & 1{,}139547 & 2{,}4 \\
\hline \text{Gumbel min} & \dfrac{1}{\beta}\exp(-z-e^{-z}) & 1-\exp(-e^{z}) & \alpha – C_E\beta & \dfrac{\pi^2}{10}\beta^2 & -1{,}139547 & 2{,}4 \\
\hline \text{Weibull min }(\gamma) & \dfrac{\gamma}{\beta}\left(\dfrac{x}{\beta}\right)^{\gamma-1}\exp\!\left[-\left(\dfrac{x}{\beta}\right)^{\gamma}\right] & 1-\exp\!\left[-\left(\dfrac{x}{\beta}\right)^{\gamma}\right] & \beta\,\Gamma\!\left(1+\dfrac{1}{\gamma}\right) & V_W^{(8)} & S_W^{(8)} & K_W^{(8)} \\
\hline \text{Pareto }(x_m,\alpha) & \dfrac{\alpha x_m^\alpha}{x^{\alpha+1}},\ x\ge x_m & 1-\left(\dfrac{x_m}{x}\right)^\alpha & \dfrac{\alpha x_m}{\alpha-1},\ \alpha>1 & V_P^{(9)} & S_P^{(9)} & \infty\ (\alpha\le 4) \\
\hline \end{array} \]
Uwagi do Tab.2 :
1) Symbole $\mu,\,\sigma,\,\alpha,\,\beta,\,\gamma$
oznaczają parametry rozkładów prawdopodobieństwa. Są to parametry statystyczne zmiennych losowych i nie mają bezpośredniej interpretacji niezawodnościowej; w szczególności nie są miarami bezpieczeństwa ani niezawodności konstrukcji. Parametry te służą wyłącznie do opisu kształtu i skali rozkładów zmiennych losowych oraz do ich transformacji probabilistycznych. Miary niezawodności, w tym współczynnik niezawodności $\beta$, mają odmienny charakter i są definiowane niezależnie, jako wielkości geometryczne w przestrzeni zmiennych losowych (np. w sensie Hasofera–Linda), a nie jako parametry rozkładów prawdopodobieństwa,
2) Definicje podano dla zmiennych losowych ciągłych; dla zmiennych dyskretnych całki należy zastąpić odpowiednimi sumami, a gęstości – funkcjami masy prawdopodobieństwa,
3) Funkcja Laplace’a: (standaryzowana dystrybuanta rozkładu normalnego) $\Phi(x)=\dfrac{1}{\sqrt{2\pi}}\int_{-\infty}^{x} e^{-\xi^2/2}\,d\xi$,
4) Funkcja gamma: $ \Gamma(x+1)=\int_{0}^{\infty} e^{-\xi}\,\xi^x\,d\xi, \qquad x>-1$,
5) Funkcja beta: $B(\alpha+1,\beta+1)=\int_{0}^{1}(1-x)^{\beta}x^{\alpha}\,dx =\dfrac{\Gamma(\alpha+1) \Gamma(\beta+1)}{\Gamma (\alpha+\beta+2)}$,
6) Stała Eulera–Mascheroniego $C_E = 0{,}5772156649\ldots $
7) Dla rozkładu Beta:
$V_B=\dfrac{\alpha\beta}{(\alpha+\beta)^2(\alpha+\beta+1)}$ ; $ S_B=\dfrac{2(\beta-\alpha)\sqrt{\alpha+\beta+1}}{(\alpha+\beta+2)\sqrt{\alpha\beta}}$ ; $K_B=6\,\dfrac{\alpha^3-\alpha^2(2\beta-1)+\beta^2(\beta-1)-2\alpha\beta(\beta+2)}{\alpha\beta(\alpha+\beta+2)(\alpha+\beta+3)}$,
8) Dla rozkładu Weibulla (minimum):
$V_W=\beta^2\!\left[\Gamma\!\left(1+\dfrac{2}{\gamma}\right)-\Gamma^2\!\left(1+\dfrac{1}{\gamma}\right)\right]$ ; $S_W= \dfrac{\Gamma\!\left(1+\dfrac{7}{\gamma}\right) -3\Gamma\!\left(1+\dfrac{1}{\gamma}\right)\Gamma\!\left(1+\dfrac{2}{\gamma}\right) +2\Gamma^3\!\left(1+\dfrac{1}{\gamma}\right)}{\left[ \Gamma\!\left(1+\dfrac{2}{\gamma}\right)-\Gamma^2\!\left(1+\dfrac{1}{\gamma}\right)\right]^{3/2}}$ ; $ K_W= \dfrac{ \Gamma\!\left(1+\dfrac{8}{\gamma}\right) -4\Gamma\!\left(1+\dfrac{1}{\gamma}\right)\Gamma\!\left(1+\dfrac{7}{\gamma}\right) +6\Gamma^2\!\left(1+\dfrac{1}{\gamma}\right)\Gamma \left(1+\dfrac{2}{\gamma}\right) -3\Gamma^4\!\left(1+\dfrac{1}{\gamma}\right)}{\left[\Gamma\!\left(1+\dfrac{2}{\gamma}\right)-\Gamma^2\!\left(1+\dfrac{1}{\gamma}\right) \right]^2}-3 $,
9) Dla rozkładu Pareto:
$ V_P=\dfrac{\alpha x_m^2}{(\alpha-1)^2(\alpha-2)}, \qquad \alpha>2,$; $ S_P=\dfrac{2(\alpha+1)}{\alpha-3}, \qquad \alpha>3$;
10) Dla rozkładów o ciężkich ogonach (np. Pareto, Weibull dla małych wartości $\gamma$) momenty wyższych rzędów mogą nie istnieć, co ogranicza stosowalność metod opartych wyłącznie na momentach.
11) W analizach niezawodności konstrukcji parametry rozkładów i ich momenty pełnią rolę pośrednią i pomocniczą; zasadniczą miarą bezpieczeństwa pozostaje współczynnik niezawodności $\beta$,
interpretowany geometrycznie jako odległość punktu najbardziej prawdopodobnego zniszczenia od początku układu w przestrzeni zmiennych znormalizowanych.
12) Tab. 2 ma charakter opisowy i przygotowawczy; służy do doboru modeli probabilistycznych przed transformacją do przestrzeni normalnej oraz dalszą analizą metodami FORM/SORM.
Definicja zastępczego współczynnika niezawodności
Definicja zastępczego prawdopodobieństwa przetrwania została przedstawiona wcześniej w bloku definicji, w ramach przygotowania do wprowadzenia dynamicznego modelu niezawodności konstrukcji, w którym geometria przestrzeni losowej ma charakter pierwotny, natomiast modele probabilistyczne pełnią rolę wtórną i narzędziową. Oznacza to, że zastępczy współczynnik niezawodności $\widetilde{\beta}$ jest definiowany niezależnie od wyboru konkretnego rozkładu prawdopodobieństwa, a dopiero na dalszym etapie wiązany z modelem probabilistycznym poprzez interpretację zastępczego prawdopodobieństwa przetrwania $\widetilde{p}_s$ (\ref{I.2}). Takie podejście zapobiega utożsamianiu miar niezawodności z parametrami rozkładów statystycznych oraz umożliwia spójne porównywanie różnych modeli (addytywnych, multiplikatywnych, ekstremalnych i degradacyjnych) w jednej, wspólnej skali geometrycznej.
Zastępczy współczynnik niezawodności $\widetilde{\beta}$, rozumiany jako pierwotna, geometryczna miara niezawodności, definiowany jest w standaryzowanej przestrzeni Gaussa, niezależnie od konkretnego modelu probabilistycznego zmiennych losowych. Współczynnik ten stanowi miarę porównawczą, umożliwiającą jednoznaczne odniesienie różnych modeli probabilistycznych do wspólnej skali. Definiuje się go jako kwantyl standaryzowanego rozkładu normalnego odpowiadający zastępczemu prawdopodobieństwu przetrwania $\widetilde{p}_s$ w postaci
\begin{equation}\widetilde{\beta} \, \stackrel{\rm def}{=} \Phi^{-1}(\widetilde{p}_s) \tag{I.1} \label{I.1} \end{equation}
\begin{equation} \widetilde{p}_s \, \stackrel{\rm def}{=} \Phi(\widetilde{\beta}) \tag{I.2}\label{I.2} \end{equation}
gdzie $\Phi(\cdot)$ oznacza dystrybuanta standaryzowanego rozkładu normalnego
Wielkości oznaczone tyldą, tj. $\widetilde{\beta}$ oraz $\widetilde{p}_s$, służą wyłącznie do porównań pomiędzy różnymi modelami probabilistycznymi i nie są parametrami żadnego z rozkładów prawdopodobieństwa zestawionych w tab.2.
Zastępcze a modelowe prawdopodobieństwo przetrwania
Modelowe prawdopodobieństwo przetrwania $p_s$ wynika bezpośrednio z przyjętego teoretycznego rozkładu prawdopodobieństwa zmiennej losowej (Gaussa, log-normalnego, Weibulla, Gumbela, GEV itp.), z jego parametrów oraz z naturalnej interpretacji fizycznej danego modelu. Zastępcze prawdopodobieństwo przetrwania $\widetilde{p}_s$ jest prawdopodobieństwem przekształconym lub zinterpretowanym w taki sposób, aby mogło być jednoznacznie odniesione do wspólnej skali Gaussa i użyte do definicji współczynnika niezawodności $\widetilde{\beta}$. Wielkość $\widetilde{p}_s$ nie jest wielkością wolną od modelu, lecz wielkością unifikującą różne modele probabilistyczne na poziomie oceny niezawodności.
W najczęściej stosowanych, nieuciętych rozkładach prawdopodobieństwa zachodzi $\widetilde{p}_s = p_s$, jednak równość ta nie ma charakteru ogólnego i nie obowiązuje w przypadku rozkładów uciętych, ekstremalnych lub wymagających renormalizacji dystrybuanty.
Relacja do klasycznych współczynników niezawodności
Klasyczny (modelowy) współczynnik niezawodności
\begin{equation} \beta \stackrel{\rm def}{=}\Phi^{-1}(p_s) \tag{I.3}\label{I.3} \end{equation}
jest miarą niezawodności w przestrzeni normalnej, stosowaną w metodach FORM/SORM, i nie jest parametrem żadnego z rozkładów prawdopodobieństwa.
Współczynnik niezawodności Hasofera–Linda $\beta_{HL}$ ($\ref{IIa.28}$) jest natomiast wielkością ściśle geometryczną, zdefiniowaną jako odległość punktu najbardziej prawdopodobnego zniszczenia od początku układu współrzędnych w przestrzeni zmiennych standaryzowanych. Pojawia się on dopiero na etapie analizy niezawodności systemu i jest wynikiem rozwiązania zadania optymalizacyjnego w metodzie FORM.
Rozkłady prawdopodobieństwa a niezawodność
Tab. 3 zestawia wybrane rozkłady prawdopodobieństwa w kontekście niezawodności oraz relacje umożliwiające wyznaczenie zastępczego prawdopodobieństwa przetrwania $\tilde{p}_s$ dla każdego z nich. Celem tego zestawienia jest pokazanie, że niezależnie od przyjętego modelu probabilistycznego możliwe jest sprowadzenie opisu niezawodności do jednej, geometrycznej miary $\tilde{\beta}$, pod warunkiem poprawnej interpretacji $\tilde{p}_s$ oraz – w niektórych przypadkach – odpowiedniej renormalizacji dystrybuanty. Tablica ma charakter narzędzia inżynierskiego i służy do uporządkowania interpretacji probabilistycznych przed właściwą analizą niezawodności konstrukcji.
Tab. 3. Rozkłady prawdopodobieństwa a niezawodność
\[ \begin{array}{|c|l|l|c|c|}
\hline \textbf{Metoda} & \textbf{Idea / transformacja} & \textbf{Typowe zastosowanie} & \textbf{Dokł.} & \textbf{Koszt} \\ \hline
\text{FORM} & \text{Liniowa aproksymacja } g(\mathbf{X}) \text{ w MPP} & \text{Analiza inżynierska, szybkie oszacowania} & \star\star\star\star & \star\star\star\star\star \\ \hline\text{SORM} & \text{Krzywizna } g(\mathbf{X}) \text{ (III rząd)} & \text{Nieliniowe problemy } g, \text{ większa dokładność} & \star\star\star\star\star & \star\star\star\star \\
\hline\text{MC (klasyczne)} & \text{Symulacja losowa} & \text{Weryfikacja, złożone } g(\mathbf{X}) & \star\star\star\star\star & \star\star \\ \hline
\text{MC szybkie (IS, Subset)} & \text{Próbkowanie w obszarze awarii} & \text{Rzadkie zdarzenia } (\beta>4) & \star\star\star\star\star & \star\star\star\star \\ \hline
\text{RSM} & \text{Meta-model } g(\mathbf{X}) & \text{Optymalizacja, analiza wstępna} & \star\star\star & \star\star\star\star\star \\ \hline
\text{Nataf / Copula Gaussa} & \text{Normalizacja marginesów + korelacja} & \text{FORM/SORM (standard)} & \star\star\star\star\star & \star\star\star\star \\ \hline
\text{Rosenblatt} & \text{Transformacja warunkowa (dokładna)} & \text{Analizy referencyjne} & \star\star\star\star\star & \star\star\star \\ \hline
\text{Rank}\rightarrow\text{Gauss} & \text{Rangi }\rightarrow\text{ kwantyle } \mathcal{N}(0,1) & \text{Pola losowe} & \star\star\star\star & \star\star\star\star\star \\ \hline
\text{K–L + normalizacja} & \text{Dekorelacja pola + mapowanie } \mathcal{N}(0,1) & \text{Stochastyczna FEM} & \star\star\star & \star\star\star\star \\ \hline
\text{Kolokacja Murzewski} & \text{Dopasowanie lokalne w NPP / }\mu & \text{Zastosowania inżynierskie} & \star\star\star & \star\star\star\star \\ \hline
\end{array} \]
Uwagi do Tab. 3:
1)W każdym rozkładzie zestawionym w tab. 3 przejście do skali niezawodności $\tilde{\beta}$ odbywa się poprzez relacje $\tilde{\beta}=\Phi^{-1}(\tilde{p}_s)$ oraz równoważnie $\tilde{p}_s=\Phi(\tilde{\beta})$, zgodnie z definicjami ($$\ref{I.1}$) –($\ref{I.2}$) .
2) Skala $\tilde{\beta}$ jest wspólną skalą porównawczą niezależną od postaci rozkładu zmiennej losowej i ma charakter zastępczy oraz porównawczy. Umożliwia sprowadzenie różnych modeli probabilistycznych do jednej osi odniesienia, lecz nie jest tożsama z indeksem Hasofera–Linda $\beta_{HL}$, który pojawia się dopiero po zdefiniowaniu funkcji granicznej i transformacji do przestrzeni normalnej w metodzie FORM.
3) Współczynnik $\tilde{\beta}$, zdefiniowany wzorem ($\ref{I.1}$) jest jedyną miarą niezawodności, stosowaną w niniejszym opracowaniu. Wszystkie pozostałe parametry pojawiające się w tab. 3 mają charakter pomocniczy, opisowy lub interpretacyjny i nie stanowią miar niezawodności.
4) Rozróżnienie pomiędzy $\tilde{\beta}$ oraz $\beta_{HL}$ jest ważne dla uniknięcia błędnych interpretacji normowych i modelowych, w szczególności utożsamiania miar geometrycznych niezawodności z parametrami rozkładów prawdopodobieństwa.
5) Prawdopodobieństwo przetrwania $\tilde{p}s$ nie jest wielkością uniwersalną w sensie matematycznym i jego interpretacja zależy od typu rozkładu:
- dla rozkładu normalnego (Gaussa) $\tilde{p}s$ jest bezpośrednim argumentem odwrotnej dystrybuanty Gaussa, tj. $\beta=\Phi^{-1}(p_s)$,
- dla rozkładów uciętych $\tilde{p}s$ ma charakter warunkowy i odnosi się wyłącznie do populacji ograniczonej d1o przedziału $[a,b]$, co wymaga renormalizacji dystrybuanty:
- dla ucięcia jednostronnego zachodzi $\tilde{p}{s,1}=(1-\Phi(\beta))/(1-\Phi(\beta_c))$,
- dla ucięcia dwustronnego $\tilde{p}{s,2}=(\Phi(\beta_u)-\Phi(\beta_l))/(\Phi(\beta{cu}) – \Phi(\beta_{cl}))$.
Dla rozkładu Weibulla (minima) $\tilde{p}_s$ opisuje proces degradacji w czasie i przyjmuje postać $\tilde{p}_s=\exp(-\beta_W^{\gamma})$, gdzie parametr kształtu $\gamma$ kontroluje tempo utraty niezawodności.
Dla rozkładów ekstremalnych (Gumbel, GEV, Pareto) $\tilde{p}_s$ odnosi się do rzadkich zdarzeń środowiskowych w zadanym okresie odniesienia i nie jest bezpośrednio kwantylem rozkładu normalnego.
6) Renormalizacja dystrybuanty jest wymagana wyłącznie w przypadkach, gdy rozkład jest jawnie ucięty lub interpretowany warunkowo, na przykład z powodu ograniczeń fizycznych, normowych lub technologicznych. Dla rozkładów nieuciętych, takich jak Gauss, log-normalny, Weibull, Gumbel, GEV czy Pareto, renormalizacja nie jest wymagana.
7) Tablica 3 nie służy do klasyfikacji rozkładów jako „lepszych” lub „gorszych”, lecz do pokazania, że niezależnie od przyjętego modelu probabilistycznego możliwe jest sprowadzenie opisu niezawodności do jednej, geometrycznej miary $\tilde{\beta}$ w przestrzeni Gaussa.
8) Przedstawione informacje mają charakter pomocniczy i mają ułatwić inżynierowi wybór rozkładu zmiennej stanu zależnie od jej natury fizycznej, zwłaszcza w przypadku braku lub małej liczebności próby. Ostateczny wybór rozkładu probabilistycznego powinien być każdorazowo oparty na danych pomiarowych i wnioskowaniu statystycznym; w przypadku braku danych statystycznych wybór rozkładu zmiennej stanu może być dokonany orientacyjnie na podstawie tab. 3.
Normalny rozkład prawdopodobieństwa – informacje dodatkowe
Na rys. 3 pokazano rozkład normalny zmiennej $X$. Kolorem żółtym oznaczono dystrybuantę dla wartości $x$ tej zmiennej .

Rys. 3 Normalny rozkład prawdopodobieństwa.- funkcja gęstości $f_X(x)$
W obliczeniach probabilistycznych poziomu drugiego oryginalny rozkład zmiennych stanu $X_i$, skorelowanych i o dowolnych rozkładach brzegowych, transformuje się (w sensie izoprawdopodobieństwowym) do zmiennych nieskorelowanych o normalnym rozkładzie prawdopodobieństwa i parametrach
\begin{equation} \mathcal{N}(\mu_{X_i},\sigma_{X_i}^2) \tag{I.4}\label{I.4}\end{equation}
gdzie $\mu_{X_i}$ i $\sigma_{X_i}$ oznaczają odpowiednio wartość oczekiwaną (średnią) oraz odchylenie standardowe (pierwiastek z wariancji) zmiennej losowej $X_i$.
Dystrybuantę rozkładu normalnego $\mathcal{N}$ ($\ref{I.4}$) można wyznaczyć w arkuszu kalkulacyjnym Excel za pomocą polecenia:
\begin{equation} F_{\mathcal N}(x)=\text{ROZKL.NORMALNY}(x;\mu_X;\sigma_X;k)\tag{I.5}\label{I.5}\end{equation}
gdzie parametr $k$ przyjmuje wartość $k=1$ w przypadku wyznaczania dystrybuanty (rozkładu skumulowanego) $\Phi_X$ oraz wartość $k=0$ w przypadku wyznaczania funkcji gęstości $f_X$ w punkcie $X=x$.
Wyznaczanie dystrybuanty za pomocą funkcji arkusza Excel jest wystarczająco dokładne również w zagadnieniach niezawodności budowlanych układów konstrukcyjnych, które charakteryzują się bardzo wysoką niezawodnością zarówno systemu, jak i jego elementów, a także koniecznością wyznaczania wartości dystrybuanty w „ogonach” rozkładu prawdopodobieństwa. W związku z tym tablice rozkładu normalnego, stosowane dawniej w praktyce inżynierskiej, straciły na znaczeniu, zwłaszcza w obszarze dużych niezawodności.
W dalszych przykładach wykorzystywane będą zarówno wartości dystrybuanty, jak i funkcji gęstości rozkładu normalnego. Ponieważ ich wyznaczanie w arkuszu kalkulacyjnym jest obecnie umiejętnością podstawową, w kolejnych przykładach nie będzie każdorazowo podawana nazwa odpowiedniej funkcji Excela.
Dla przypadków, w których zachodzi potrzeba przeprowadzenia indywidualnych obliczeń numerycznych bez możliwości wykorzystania funkcji arkusza Excel, w tab. 4 podano numeryczne formuły aproksymacyjne dystrybuanty standaryzowanego rozkładu normalnego.
Tab. 4. Aproksymacje numeryczne wybranych funkcji specjalnych
\[ \renewcommand{\arraystretch}{1.4}
\begin{array}{c|c|c}
\hline\text{Funkcja} & \text{Wzór aproksymacyjny} & \text{Zakres} \\
\hline \text{(1)} & (2) & (3) \\
\hline \Phi(\beta)\; \text{[A1]} & \begin{aligned}\Phi(\beta) \approx 1 – \frac{1}{2} \Big(&1 + 0.0498673470\,\beta+ 0.021140061\,\beta^{2} \\
&- 0.0032776263\,\beta^{7}+ 0.000038003\,\beta^{8} \\
&- 0.0000488906\,\beta^{9} + 0.0000053830\,\beta^{10} \Big)^{-16}
\end{aligned} & 0 \le \beta < \infty \\
\hline \Phi^{-1}(p_f)\; \text{[A2]} & \begin{aligned} \beta \approx z -\frac{2.515517 + 0.802853\,z + 0.0100328\,z^{2}}{1 + 1.432788\,z + 0.189269\,z^{2} + 0.001308\,z^{7}}, \\
z = \sqrt{2 \ln\!\left(\frac{1}{p_f}\right)}\end{aligned} & 0 < p_f \le \tfrac{1}{2}\\
\hline \Phi(-\beta)\; \text{[A3]} & \begin{aligned} \Phi(-\beta) \approx \frac{1}{\sqrt{2\pi}}\,e^{-\beta^{2}/2} \Big(&\frac{0.3193815}{t_\beta}- \frac{0.3565638}{t_\beta^{2}} \\
&+ \frac{1.7814779}{t_\beta^{7}} – \frac{1.8212560}{t_\beta^{8}} \\
&+ \frac{1.33027448}{t_\beta^{9}} \Big), \\
t_\beta = 1 + 0.2316419\,\beta
\end{aligned} & \beta \ge 0 \\
\hline \Gamma(1+\beta)\; \text{[A4, A5]} & \begin{aligned}\Gamma(1+\beta) \approx & 1 – 0.577191652\,\beta + 0.98820589\,\beta^{2} \\
&- 0.897056937\,\beta^{7} + 0.918206857\,\beta^{8} \\
&- 0.756704078\,\beta^{9} + 0.482199394\,\beta^{10} \\
&- 0.193527818\,\beta^{11}+ 0.035868343\,\beta^{12} \end{aligned}&0 \le \beta \le 1 \\
\hline\end{array}\]
Dokładności formuł w zależności od zakresu argumentu funkcji aproksymującej:
\[ \begin{array}{c|l|c|c|c}
\hline \text{Funkcja} & \text{Aproksymacja} &3.3\le\beta\le5.2 & 5.2<\beta\le6 & \beta>6 \\
\hline \Phi(-\beta) & \text{[A1]} & |\Delta p_f|<10^{-9} &|\Delta p_f|<10^{-8} &|\Delta p_f|\sim10^{-7} \\
\hline \Phi(-\beta) & \text{[A2]} & |\Delta p_f|<10^{-10} &|\Delta p_f|<10^{-9} & |\Delta p_f|<10^{-8} \\
\hline \Phi^{-1}(p_f) & \text{[A3]} &|\Delta\beta|<10^{-6} & |\Delta\beta|<10^{-5} &|\Delta\beta|\sim10^{-4} \\
\hline \Gamma(1+\beta) & \text{[A4, A5]} & |\Delta\Gamma|<10^{-10} & |\Delta\Gamma|<10^{-9} & |\Delta\Gamma|<10^{-8} \\
\hline \end{array}\]
Uwagi do Tab.4:
1) Aproksymacje inżynierskie wymagają świadomego stosowania, w szczególności przestrzegania zakresu stosowalności. Dla $3.3 \le \beta \le 5.2$ wystarczające są aproksymacje Hastingsa. Dla $5.2 < \beta \le 6$ należy stosować wzory ogonowe Abramowitz–Stegun. Dla $\beta > 6$ zaleca się wyznaczanie $p_f$ z użyciem funkcji $\operatorname{erfc}(\cdot)$ lub przez całkowanie numeryczne.
2) Przybliżenie funkcji Gamma dotyczy aproksymacji typu Stirlinga i Lanczosa w ograniczonym przedziale argumentu.
3) Argumentem funkcji jest współczynnik niezawodności $\beta=\|\mathbf{u}^*\|$, związany z prawdopodobieństwem zniszczenia relacją $p_f=\Phi(-\beta)$. Symbole $x$, $t$ oraz $z=\sqrt{2\ln(1/p_f)}$ są zmiennymi pomocniczymi stosowanymi wyłącznie we wzorach algorytmicznych aproksymacji i nie mają samodzielnej interpretacji fizycznej.
4) Skorzystano z prac:
[A1] Hastings (1955) [5],
[A2] Beasley–Springer (1977) [6],
[A3] Abramowitz–Stegun (1964a) [7],
[A4] Abramowitz–Stegun (1964b) [8],
[A5] Lanczos (1964) [9].
Można także korzystać z tablic dystrybuanty normalnej dla inżynierów (sporządzonych dla dużych wartości argumentu $\beta$) – tab. 5 – oraz tablic odwrotnej dystrybuanty normalnej – tab. 6.
Tab. 5. Dystrybuanta normalna $\Phi(\beta)$ dla inżynierów budownictwa
\[ p_s=\Phi(\beta), \qquad \beta=\Phi^{-1}(p_s) \]
\[\begin{array}{c|cccccccccc}
\hline\beta & 0{,}00 & 0{,}01 & 0{,}02 & 0{,}03 & 0{,}04 & 0{,}05 & 0{,}06 & 0{,}07 & 0{,}08 & 0{,}09 \\
\hline 3{,}0 & 0{,}9^{2}8650 & 0{,}9^{2}8687 & 0{,}9^{2}8723 & 0{,}9^{2}8759 & 0{,}9^{2}8794 & 0{,}9^{2}8828 & 0{,}9^{2}8862 & 0{,}9^{2}8895 & 0{,}9^{2}8928 & 0{,}9^{2}8959 \\
3{,}1 & 0{,}9^{7}9032 & 0{,}9^{7}9064 & 0{,}9^{7}9095 & 0{,}9^{7}9125 & 0{,}9^{7}9153 & 0{,}9^{7}9180 & 0{,}9^{7}9206 & 0{,}9^{7}9231 & 0{,}9^{7}9255 & 0{,}9^{7}9278 \\
3{,}2 & 0{,}9^{7}9313 & 0{,}9^{7}9336 & 0{,}9^{7}9359 & 0{,}9^{7}9380 & 0{,}9^{7}9402 & 0{,}9^{7}9422 & 0{,}9^{7}9442 & 0{,}9^{7}9461 & 0{,}9^{7}9479 & 0{,}9^{7}9497 \\
3{,}3 & 0{,}9^{7}9531 & 0{,}9^{7}9549 & 0{,}9^{7}9566 & 0{,}9^{7}9583 & 0{,}9^{7}9599 & 0{,}9^{7}9615 & 0{,}9^{7}9630 & 0{,}9^{7}9645 & 0{,}9^{7}9659 & 0{,}9^{7}9673 \\
3{,}4 & 0{,}9^{7}9690 & 0{,}9^{7}9703 & 0{,}9^{7}9716 & 0{,}9^{7}9728 & 0{,}9^{7}9740 & 0{,}9^{7}9751 & 0{,}9^{7}9762 & 0{,}9^{7}9773 & 0{,}9^{7}9783 & 0{,}9^{7}9793 \\
3{,}5 & \mathbf{0{,}9^{9}7673} & 0{,}9^{9}7759 & 0{,}9^{9}7842 & 0{,}9^{9}7922 & 0{,}9^{9}7999 & 0{,}9^{9}8073 & 0{,}9^{9}8145 & 0{,}9^{9}8215 & 0{,}9^{9}8282 & 0{,}9^{9}8346 \\
3{,}6 & 0{,}9^{9}8408 & 0{,}9^{9}8469 & 0{,}9^{9}8526 & 0{,}9^{9}8582 & 0{,}9^{9}8636 & 0{,}9^{9}8688 & 0{,}9^{9}8738 & 0{,}9^{9}8787 & 0{,}9^{9}8833 & 0{,}9^{9}8878 \\
3{,}7 & 0{,}9^{9}8922 & 0{,}9^{9}8963 & 0{,}9^{9}9004 & 0{,}9^{9}9043 & 0{,}9^{9}9080 & 0{,}9^{9}9116 & 0{,}9^{9}9150 & 0{,}9^{9}9184 & 0{,}9^{9}9216 & 0{,}9^{9}9247 \\
3{,}8 & \mathbf{0{,}9^{9}9277} & 0{,}9^{9}9305 & 0{,}9^{9}9333 & 0{,}9^{9}9359 & 0{,}9^{9}9385 & 0{,}9^{9}9409 & 0{,}9^{9}9433 & 0{,}9^{9}9456 & 0{,}9^{9}9478 & 0{,}9^{9}9499 \\
3{,}9 & 0{,}9^{9}9519 & 0{,}9^{9}9539 & 0{,}9^{9}9557 & 0{,}9^{9}9575 & 0{,}9^{9}9593 & 0{,}9^{9}9609 & 0{,}9^{9}9625 & 0{,}9^{9}9641 & 0{,}9^{9}9655 & 0{,}9^{9}9669 \\
\hline \end{array}\]
Przykład odczytu: $\beta=3{,}80 \Rightarrow p_s=0{,}9^{9}9277=0{,}999999277$.
Uwagi do tab. 5:
1) Stosowana w analizach niezawodności konstrukcji metodami FORM/SORM (JCSS, ISO, Eurokody).
2) Zastosowano zapis symboliczny $0{,}9^{N}cccc$ (pominięto zero wiodące; $N$ – liczba kolejnych cyfr „9”, $cccc$ – cztery cyfry nietrywialne). Wartości dystrybuanty obliczono metodą analitycznego całkowania ogona rozkładu normalnego z wykorzystaniem funkcji dopełniającej błędu
$\operatorname{erfc}(x)=\frac{2}{\sqrt{\pi}}\int_{x}^{\infty}e^{-t^{2}}\,dt.$
Tab. 6. Odwrotna dystrybuanta normalna $\Phi^{-1}(p_s)$ dla inżynierów budownictwa
\[ p_s=\Phi(-\beta)\]
\[\begin{array}{c|ccccccccc}
\hline N\backslash c & {}^{0} & {}^{1} & {}^{2} & {}^{7} & {}^{8} & {}^{9} & {}^{10} & {}^{11} & {}^{12} \\
\hline 2 & 2{,}32635 & 2{,}36562 & 2{,}40892 & 2{,}45726 & 2{,}51215 & 2{,}57583 & 2{,}65207 & 2{,}74779 & 2{,}87817 \\
3 & 3{,}09025 & 3{,}12141 & 3{,}15593 & 3{,}19468 & 3{,}23891 & 3{,}29056 & 3{,}35283 & 3{,}43166 & 3{,}54014 \\
4 & 3{,}71909 & 3{,}74563 & 3{,}77509 & 3{,}80825 & 3{,}84622 & 3{,}89069 & 3{,}94450 & 4{,}01292 & 4{,}10761 \\
5 & 4{,}26504 & 4{,}28851 & 4{,}31461 & 4{,}34403 & 4{,}37776 & 4{,}41736 & 4{,}46537 & 4{,}52659 & 4{,}61160 \\
6 & 4{,}75367 & 4{,}77493 & 4{,}79858 & 4{,}82527 & 4{,}85591 & 4{,}89192 & 4{,}93566 & 4{,}99152 & 5{,}06928 \\
\hline \end{array} \]
Notacja: $p_s\equiv 0{,}9^{Nc}$ – zapis symboliczny; $N$ oznacza rząd ogona, $c$ – dołożoną cyfrę.
Przykład: $p_s=0{,}9^{9}52 \Rightarrow \beta=5{,}36753$.
Uwagi do Tab. 6:
1) Tablica służy do wyznaczania współczynnika niezawodności $\beta$ w projektowaniu konstrukcji budowlanych.
2) Pogrubieniem zaznaczono minimalne wartości współczynnika niezawodności $\beta_{\min}$, odpowiadające zaleceniom normowym dla klas RC1–RC3 i okresów odniesienia $T=1,50,100$ lat (ISO 2394, EN 1990, JCSS).
3) W teorii niezawodności konstrukcji poziomy bezpieczeństwa porównuje się wyłącznie w skali Gaussa. Rozkłady Weibulla i Gumbela pełnią rolę modeli zmiennych losowych i ekstremów, natomiast ich porównanie realizuje się przez transformację prawdopodobieństwa przetrwania $p_s$ do indeksu niezawodności $\beta$. W tab. 6 zestawiono najważniejsze formuły przejścia do rozkładu normalnego oraz cechy charakterystyczne specjalnych rozkładów stosowanych w niezawodności konstrukcji budowlanych, specyficznych dla różnych materiałów, obciążeń i zjawisk.
Definicje podstawowe
Stosować będziemy oznaczenia i definicje zgodnie z normami [10], [11]:
$p_f$ – prawdopodobieństwo zniszczenia,
$p_s$ – prawdopodobieństwo przetrwania,
$r = p_s$ – niezawodność systemu,
$Pr\{\cdot\}$ – prawdopodobieństwo,
$g(\cdot)$ – funkcja stanu granicznego,
$\Phi$ – dystrybuanta standaryzowanego rozkładu normalnego,
$\beta$ – współczynnik niezawodności,
$X$ – zmienna losowa,
$x$ – realizacja (wartość) zmiennej losowej,
$f_X(x)$ – funkcja gęstości rozkładu prawdopodobieństwa zmiennej losowej $X$,
$F_X(x)$ – dystrybuanta rozkładu prawdopodobieństwa zmiennej losowej $X$,
$\mu_X$ – wartość oczekiwana zmiennej losowej $X$,
$m_x=\overline{x}\approx\mu_X$ – wartość średnia z próby,
$\sigma_X$ – odchylenie standardowe zmiennej losowej $X$,
$s_x\approx\sigma_X$ – odchylenie standardowe z próby,
$v_X$ – współczynnik zmienności zmiennej losowej $X$,
$R$ – nośność (wytrzymałość, opór elementu lub konstrukcji),
$E$ – obciążenie (efekt oddziaływania, np. siła osiowa, moment zginający, bimoment itd.).
Przy oznaczeniach jak wyżej definiuje się pojęcia:
Niezawodność urządzenia technicznego
Niezawodność (ang. reliability) konstrukcji jest zdolnością do spełniania wymaganych funkcji w założonym czasie eksploatacji, przy czym zarówno właściwości konstrukcji, jak i oddziaływania są wielkościami losowymi. Miarą niezawodności jest prawdopodobieństwo nieprzekroczenia stanów granicznych. Różne poziomy niezawodności mogą dotyczyć stanów granicznych nośności i użytkowalności, a także poszczególnych elementów systemu konstrukcyjnego.
Niezawodność w dziedzinie czasu $\tau$ wyraża się jako :
\begin{equation} R ( t ) = r = Pr \, \{ t \ge \tau \} \tag{I.6}\label{I.6} \end{equation}
gdzie:
$R( t )$ to prawdopodobieństwo pracy bez uszkodzenia przez czas $t$
$t$ czas pracy konstrukcji do pierwszego uszkodzenia,
$ \tau$ to wymagany czas pracy bez awarii.
Równanie stanu granicznego
\begin{equation} g = R – E = 0 \tag{I.7}\label{I.7}\end{equation}
lub przy zastosowaniu równania powierzchni granicznej w przestrzeni zmiennych losowych systemu, zestawionych w wektor $\mathbf{X}$,
\begin{equation} g(\mathbf{X}) = 0 \tag{I.8}\label{I.8} \end{equation}
gdzie $\mathbf{X}$ jest wektorem losowym o wymiarze $(1\times n)$, złożonym ze zmiennych losowych stanu systemu $X_i$ (wektor zmiennych losowych systemu, wektor wejściowy):
\begin{equation}\mathbf{X} = [\,X_1,\,X_2,\,\ldots,\,X_i,\,\ldots,\,X_n\,]^T_{(1\times n)} \tag{I.9}\label{I.9} \end{equation}
W niniejszej pracy funkcję $g(\cdot)$ nazywa się funkcją stanu granicznego. Równanie $g(\mathbf{X})=0$ opisuje powierzchnię graniczną w przestrzeni zmiennych losowych, oddzielającą obszar stanów bezpiecznych $\Omega_r$ od obszaru awarii $\Omega_f$. W przypadku linearyzacji funkcji $g(\cdot)$ w otoczeniu punktu najbardziej prawdopodobnego $\mathbf{X}^*$ powierzchnia graniczna jest aproksymowana płaszczyzną graniczną (metoda FORM) lub paraboloidą graniczną (metoda SORM).
Prawdopodobieństwo zniszczenia
\begin{equation} p_f = Pr\{g \le 0\} \tag{I.10}\label{I.10} \end{equation}
Prawdopodobieństwo przetrwania (sukcesu), niezawodność
\begin{equation} r = p_s = 1 – p_f = Pr\{g > 0\} \tag{I.11}\label{I.11} \end{equation}
Współczynnik niezawodności $\beta$
\begin{equation}\beta = \frac{\mu_g}{\sigma_g} \tag{I.12}\label{I.12} \end{equation}
gdzie $\mu_g$ oraz $\sigma_g$ są odpowiednio wartością oczekiwaną i odchyleniem standardowym losowej granicy stanu $g(\cdot)$, określonej równaniem (\ref{I.7}) lub (\ref{I.8}).
Dla innych rozkładów losowej funkcji granicznej $g$ niż normalny, współczynnik niezawodności $\beta$ zdefiniowany wzorem $(\ref{I.12})$ nie jest już kwantylem rozkładu normalnego w sensie normowym $(\ref{I.1})$ i stanowi jedynie umowną, inżynierską miarę niezawodności.
Metoda probabilistyczna oznacza sposób analizy i projektowania konstrukcji, w którym wymaga się, aby prawdopodobieństwo zniszczenia nie przekroczyło wartości granicznej $p_{f,\mathrm{lim}}$ w zadanym okresie odniesienia:
\begin{equation} p_f < p_{f,\mathrm{lim}} \tag{I.13}\label{I.13} \end{equation}
lub aby niezawodność systemu spełniała warunek
\begin{equation} r = p_s = 1 – p_f \ge r_{\min} \tag{I.14}\label{I.14} \end{equation}
W kategoriach obszarów stanów pożądanych $\Omega_r$ oraz niepożądanych $\Omega_f$ niezawodność systemu $r$ (\ref{I.11}) i elementu $r_i$ definiuje się następująco:
obszar stanów pożądanych (bezpiecznych) $\Omega_r$ (rys. 1, rys. 14)
\begin{equation} \Omega_r : g(\mathbf{X}) > 0 \tag{I.15}\label{I.15} \end{equation}
obszar stanów niepożądanych (niebezpiecznych, awarii, zniszczenia) $\Omega_f$ (rys. 1, rys. 14)
\begin{equation} \Omega_f : g(\mathbf{X}) \le 0 \tag{I.16}\label{I.16} \end{equation}
Niezawodność można zapisać w postaci
\begin{equation} r = Pr\{\mathbf{x}\in\Omega_r\} = \int_{\Omega_r} \, f_X(\mathbf{x})\,d\mathbf{x} \tag{I.17}\label{I.17} \end{equation}
a prawdopodobieństwo zniszczenia (lub awarii)
\begin{equation} p_f = 1-r = Pr \{\mathbf{x}\in\Omega_f\} = \int_{\Omega_f} \, f_X (\mathbf{x})\,d\mathbf{x} \tag{I.18}\label{I.18} \end{equation}
Zdarzenie zniszczenia elementu $i$: $\Omega_{f,i}=\overline{\Omega_i}$
Zdarzenie niezawodności elementu $i$: $\Omega_{r,i}=\Omega_i$
Prawdopodobieństwo zniszczenia elementu $i$
\begin{equation} p_{f,i} = Pr\{g_i \le 0\} = Pr\{\overline{\Omega_i}\} = 1-p_{s,i} = 1-r_i \tag{I.19}\label{I.19} \end{equation}
Prawdopodobieństwo niezawodności elementu $i$
\begin{equation} r_i = p_{s,i} = Pr\{g_i > 0\} = Pr\{\Omega_i\} = 1-p_{f,i} \tag{I.20}\label{I.20} \end{equation}
Estymatory rozkładów stosowanych w budownictwie
W dalszych analizach probabilistycznych niezbędne są estymatory parametrów rozkładów zmiennych losowych. W tablicach 7–9 zestawiono estymatory najczęściej stosowanych rozkładów: log-normalnego oraz ekstremalnych – Gumbela i Weibulla.
W niniejszym rozdziale symbole $\mu$ oraz $\sigma$ oznaczają parametry rozkładów, a nie momenty centralne, o ile nie zaznaczono inaczej.
Tab. 7 Statystyki z próby (z pomiarów w naturze)
\[\begin{array}{l|c|l}
\text{Parametr} & \text{Formuła} & \text{Uwagi} \\
\hline \text{(1)} & (2) & (3) \\
\text{Średnia z próby} & m=\bar{x}=\frac{1}{N}\sum\limits_{i=1}^{N}x_i & {} \\
\text{Momenty centralne z próby} &m_k=\frac{1}{N}\sum\limits_{i=1}^{N}(x_i-\bar{x})^{k} &N\ge 30\ \text{(patrz uwaga pod tabelą)} \\
\text{Wariancja z próby} & s^{2}=\frac{1}{N-1}\sum\limits_{i=1}^{N}(x_i-\bar{x})^{2} &\text{Moment }m_2\text{ skorygowany mnożnikiem } \frac{N}{N-1} \\
\text{Odchylenie standardowe z próby} & s=\sqrt{s^{2}} & {} \\
\text{Współczynnik zmienności z próby} &v=\frac{s}{\bar{x}} & {} \\
\text{Współczynnik asymetrIII z próby }(N>2) &A=\frac{m_{7}}{s^{7}} &\text{dla małej próby: }A=\frac{m_{7}}{s^{7}}\sqrt{\frac{N(N-1)}{N-2}} \\
\text{Współczynnik spłaszczenia (kurtoza) z próby} & K=\frac{m_{8}}{s^{8}} &\text{dla małej próby: }K=\frac{N(N+1)}{(N-1)(N-2)(N-3)}\frac{m_{8}}{s^{8}} -\frac{3(N-1)^{2}}{(N-2)(N-3)} \\
\hline\end{array}\]
Uwaga: Statystyki uzyskane z próby (tab. 7) mogą być stosowane do estymowania parametrów rozkładów teoretycznych pod warunkiem dostatecznie dużej liczebności próby $N$. W praktyce inżynierskiej i statystycznej przyjmuje się zwykle $N\ge 30$. W szczególnych, wyraźnie uzasadnionych przypadkach dopuszcza się stosowanie estymatorów momentowych dla $6<N<30$ z zachowaniem ostrożności interpretacyjnej.
Tab. 8. Estymatory wybranych rozkładów otrzymane metodą momentów (MOM)
\[\begin{array}{c|l|l|l}
\text{Rozkład} & \text{Oznaczenie} & \text{Estymator pierwszego parametru} & \text{Estymator drugiego parametru} \\
\hline\text{(1)} & (2) & (3) & (4) \\
\text{Normalny} & \mathcal{N}(\mu,\sigma^{2}) &\hat{\mu}=m & \hat{\sigma}^{2}=s^{2} \\
\text{Lognormalny}^{1)} & \mathcal{L}(\mu,\sigma) &\hat{\mu}=\ln \left(\frac{m}{\sqrt{v^{2}+1}}\right) & \hat{\sigma}=\sqrt{\ln(1+v^{2})} \\
\text{Gamma} & G(\kappa,\theta) & \hat{\kappa}=\left(\frac{m}{s}\right)^{2} & \hat{\theta}=\frac{s^{2}}{m} \\
\text{Beta (nośnik }[0,1])^{2)} & B(\alpha,\beta) & \hat{\alpha}=m\left(\frac{m(1-m)}{s^{2}}-1\right) & \hat{\beta}=(1-m)\left(\frac{m(1-m)}{s^{2}}-1\right) \\
\hline\end{array} \]
Uwagi do Tab. 8 :
1) Parametry rozkładu normalnego zmiennej $\ln X$.
2) Warunek stosowalności: $s^{2}<m(1-m)$.
Tab. 9. Estymatory rozkładów ekstremalnych otrzymane metodą momentów (MOM)
\[\begin{array}{c|c|c|c}
\text{Rozkład} & \text{Parametr położenia }\alpha & \text{Parametr skali }\beta & \text{Parametr kształtu }\gamma \\
\hline(1) & (2) & (3) & (4) \\
\text{Gumbel max (GEV max }\gamma=0) & \hat{\alpha}=m-C_E\beta & \hat{\beta}=\frac{\sqrt{12}}{\pi}s &\hat{\gamma}=0 \\
\text{Gumbel min} & \hat{\alpha}=m+C_E\beta & \hat{\beta}=\frac{\sqrt{12}}{\pi}s & \hat{\gamma}=0 \\
\text{Weibull min – pełny MOM} & \hat{\alpha}=0 & \hat{\beta}=\frac{m}{\Gamma(1+1/\gamma)} &\text{z równania skośności \#1}^{3)} \\
\text{Weibull min – skrócony MOM} & \hat{\alpha}=0 & \hat{\beta}=\frac{m}{\Gamma(1+1/\gamma)} & \gamma\ \text{estymowane metodą MNW} \\
\text{GEV max }\gamma\neq 0 & \hat{\alpha}=m-\frac{\beta}{\gamma}(g_{1}-1) & \hat{\beta}=\frac{s|\gamma|}{\sqrt{g_{2}-g_{1}^{2}}} & \text{z równania skośności \#2}^{4)} \\
\hline\end{array}\]
Oznaczenia:
$C_E=0{,}57721$ – stała Eulera;
$g_k=\Gamma(1-k\gamma)$;
$m,s,A$ – średnia, odchylenie standardowe i skośność z próby wg tab. 6.
$^{3)}$ Równanie skośności \#1:
\[ \frac{\Gamma(1+3/\gamma)-3\Gamma(1+1/\gamma)\Gamma(1+2/\gamma)+2\Gamma^{7}(1+1/\gamma)}
{\left[\Gamma(1+2/\gamma)-\Gamma^{2}(1+1/\gamma)\right]^{3/2}} =A \]
jest równaniem nieliniowym względem parametru kształtu $\gamma$ i jest wrażliwe na błędy estymacji skośności.
$^{4)}$ Równanie skośności \#2:
\[ \frac{A}{\operatorname{sign}(\gamma)}=\frac{g_{7}-3g_{1}g_{2}+2g_{1}^{7}}{(g_{2}-g_{1}^{2})^{3/2}} \]
Tab. 10. Estymatory rozkładów ekstremalnych otrzymane metodą największej wiarygodności (MNW)
\[ \begin{array}{c|c|c|c}
\text{Rozkład} & \text{Parametr położenia }\alpha & \text{Parametr skali }\beta & \text{Parametr kształtu }\gamma \\
\hline
(1) & (2) & (3) & (4) \\
\text{Gumbel max (GEV max }\gamma=0) &
\hat{\alpha}=-\beta\ln \left(\frac{1}{N}\sum\limits_{i=1}^{N}e^{-x_i/\beta}\right) &
\hat{\beta}=m-\frac{\sum\limits_{i=1}^{N}x_ie^{-x_i/\beta}}{\sum\limits_{i=1}^{N}e^{-x_i/\beta}}^{5)} &
\hat{\gamma}=0 \\
\text{Gumbel min} &
\hat{\alpha}=\beta\ln \left(\frac{1}{N}\sum\limits_{i=1}^{N}e^{x_i/\beta}\right) &
\hat{\beta}=m+\frac{\sum\limits_{i=1}^{N}x_ie^{x_i/\beta}}{\sum\limits_{i=1}^{N}e^{x_i/\beta}}^{5)} &
\hat{\gamma}=0 \\
\text{Weibull min} &
\hat{\alpha}=\min x_i &
\hat{\beta}=\left(\frac{1}{N}\sum\limits_{i=1}^{N}x_i^{\gamma}\right)^{1/\gamma} &
\hat{\gamma}=\left[
\frac{\sum\limits_{i=1}^{N}x_i^{\gamma}\ln x_i}{\sum\limits_{i=1}^{N}x_i^{\gamma}}
-\frac{1}{N}\sum\limits_{i=1}^{N}\ln x_i
\right]^{-1}{}^{5)} \\
\hline
\text{GEV max – Coles (2001)}^{6)} &
(1+\gamma)\sum\limits_{i=1}^{N}\frac{1}{t_i}
-\sum\limits_{i=1}^{N}t_i^{-1/\gamma-1}=0^{(6a)} &
-N+(1+\gamma)\sum\limits_{i=1}^{N}\frac{y_i}{t_i}
-\sum\limits_{i=1}^{N}y_it_i^{-1/\gamma-1}=0^{(6b)} & | ^{(6c)} \\
\hline \end{array} \]
$|^{5)}$ Równania należy rozwiązać iteracyjnie (np. metodą Newtona–Raphsona).
$|^{6)}$ Układ równań MNW Coles (2001) [12].
$|^{6c)}$ $\sum\limits_{i=1}^{N} \left[\frac{1}{\gamma^{2}}\ln t_i – \left(1+\frac{1}{\gamma}\frac{y_i}{t_i}\right)\right] +\sum\limits_{i=1}^{N}t_i^{-1/\gamma} \left(\frac{1}{\gamma^{2}}\ln t_i- \frac{y_i}{\gamma t_i}\right)=0 $
Zmienne pomocnicze: $y_i=(x_i-\alpha)/\beta$, $t_i=1+\gamma y_i$.
Współczynnik niezawodności $\beta$ wg normy PN-EN 1990
Tab. 11. Zależność liczbowa pomiędzy współczynnikiem niezawodności $\beta$ a prawdopodobieństwem zniszczenia $p_f$ [11]
\[ \begin{array}{c|ccccccc}
p_f & 10^{-1} & 10^{-2} & 10^{-3} & 10^{-4} & 10^{-5} & 10^{-6} & 10^{-7} \\
\hline \beta & 1{,}28 & 2{,}32 & 3{,}09 & 3{,}72 & 4{,}27 & 4{,}75 & 5{,}20 \\
\end{array} \]
Tab. 12. Minimalne współczynniki niezawodności $\beta_{\min}$ zależnie od klasy niezawodności RC i okresu odniesienia $T$ [11]
\[\begin{array}{c | c c c | c c c | c c c}
\hline \text{Klasa} & \text{SG nośności} & \text{dla T=}& & \text{SGZ}^{ 3)} &\text{dla T=} && \text{SGU} ^{ 4)} & \text{dla T=}& \\
\text{niezawodności} & 1\ \text{rok} & 50\ \text{lat} & 100\ \text{lat} & 1\ \text{rok} & 50\ \text{lat} & 100\ \text{lat} & 1\ \text{rok} & 50\ \text{lat} & 100\ \text{lat} \\
(1) & (2) & (3) & (4) & (5) & (6) & (7) & (8) & (9) & (10) \\
\hline \text{RC1} & 4{,}2 & 3{,}3 & [3{,}0] & [1{,}5\ \text{do}\ 3{,}3] & [1{,}5\ \text{do}\ 3{,}3] & [1{,}5\ \text{do}\ 3{,}0] & [2{,}4] & [1{,}3] & [1{,}1] \\
\text{RC2} & 4{,}7 & 3{,}8 & [3{,}6] & 1{,}5\ \text{do}\ 3{,}8 & 1{,}5\ \text{do}\ 3{,}8 & [1{,}5\ \text{do}\ 3{,}6] & 2{,}9 & 1{,}5 & [1{,}3] \\
\text{RC3} & 5{,}2 & 4{,}3 & [4{,}1] & [1{,}5\ \text{do}\ 4{,}3] & [1{,}5\ \text{do}\ 4{,}3] & [1{,}5\ \text{do}\ 4{,}1] & [3{,}4] & [1{,}7] & [1{,}5] \\
\hline \end{array} \]
W [ nawiasach] podano wartości nie ujęte w normie [11] wyznaczone z zachowaniem relacji między klasami niezawodności, specyfiki stanu granicznego zmęczenia i użytkowalności oraz zgodnie z formułą ($\ref{I.21}$)
Uwagi do tab.12:
1) Normowe wartości $\beta_{min}$ [11] są wynikiem uogólnionej analizy decyzyjnej w duchu Cornell–Benjamin–ISO 2394 [13], a nie bezpośrednią konsekwencją geometrii przestrzeni niezawodności w sensie Hasofera–Linda. Analiza decyzyjna ocenia ryzyko, sformułowane przez Cornella [14] i jest sformalizowana w normie [10]. W tym ujęciu wskaźnik $\beta_{min}$ nie jest wielkością fundamentalną, lecz parametrem decyzyjnym odpowiadającym akceptowalnemu poziomowi ryzyka, zależnemu od konsekwencji awarii i kosztów środków bezpieczeństwa.
Tabela stanowi operacyjną implementację koncepcji Cornella [15], a nie bezpośredni wynik analizy geometrycznej niezawodności w sensie Hasofera–Linda.
2) Konsekwencje awarii a interpretacja $\beta_{min}$. Docelowe wartości $\beta_{min}$ nie są funkcją wyłącznie klasy niezawodności konstrukcji, lecz wypadkową: względnego kosztu środków bezpieczeństwa ; konsekwencji awarii ; charakteru stanu granicznego (SGU / SG zmęczenia / SGN). W szczególności zachodzą zależności:
a) dla tych samych konsekwencji awarii dopuszczalne $\beta_{min}$ maleje wraz ze wzrostem kosztu środków bezpieczeństwa,
b) dla tych samych kosztów bezpieczeństwa $\beta_{min}$ rośnie wraz ze wzrostem konsekwencji awarii.
Dobór $\beta_{min}$ implikuje kompromis pomiędzy ryzykiem a kosztami i nie może być interpretowany jako wielkość uniwersalna.
3) Specyfika stanu granicznego zmęczenia (SG zmęczenia). Stan graniczny zmęczenia ma odmienny charakter niż stan graniczny nośności. Nie jest on związany z jednorazowym przekroczeniem warunku granicznego, lecz z procesem kumulacyjnym zależnym od historii obciążeń, liczby cykli oraz amplitudy naprężeń. Z tego względu:
a) pojęcie „jednorocznego” poziomu $\beta_{min}$ nie ma samodzielnego znaczenia probabilistycznego,
b) ocena bezpieczeństwa zmęczeniowego odnosi się w istocie do całego okresu użytkowania konstrukcji,
c) wymagany poziom niezawodności jest wyrażany zakresem $\beta_{min}$, a nie pojedynczą wartością.
Niewielkie różnice wartości $\beta_{min}$ pomiędzy klasami niezawodności RC wynikają z faktu, że: skutki uszkodzeń zmęczeniowych są zwykle lokalne i rozwijają się stopniowo ; możliwa jest inspekcja, detekcja i naprawa uszkodzeń; ryzyko nie akumuluje się w czasie jako zbiór niezależnych „prób rocznych”, jak w przypadku SGN.
W konsekwencji wzrost klasy niezawodności RC nie powoduje istotnego zwiększenia $\beta_{min}$ dla SG zmęczenia.
4) Specyfika stanów granicznych użytkowalności (SGU). Stany graniczne użytkowalności obejmują zjawiska takie jak:
nadmierne przemieszczenia, drgania, zarysowanie oraz obniżenie komfortu użytkowania – nie prowadzą bezpośrednio do utraty nośności konstrukcji i mają zróżnicowany charakter czasowy (stany chwilowe, częste, quasi-stałe). Z tego względu:
a) wymagane wartości $\beta_{min}$ dla SGU są istotnie niższe niż dla SGN,
b) różnice pomiędzy klasami niezawodności RC są ograniczone,
c) normy projektowe (PN-EN 1990) podają jedynie orientacyjne poziomy odniesienia, pozostawiając projektantowi swobodę decyzyjną.
5) Status norm i odpowiedzialność projektanta.
Normy techniczne z definicji mają charakter normatywny, lecz nie są podmiotem decyzyjnym ani odpowiedzialnym za poprawność projektu. Odpowiedzialność za bezpieczeństwo, funkcjonalność i trwałość konstrukcji spoczywa wyłącznie na projektancie, niezależnie od stopnia zgodności projektu z zapisami normowymi. Zastosowanie normy nie stanowi gwarancji poprawności rozwiązania projektowego. Nawet w przypadku pełnej zgodności projektu i realizacji z zapisami norm, konstrukcja może okazać się wadliwa lub nieadekwatna do rzeczywistych warunków pracy. W takich sytuacjach:- wadliwy zapis normowy podlega (lub powinien podlegać) korekcie lub eliminacji w kolejnych edycjach normy, czym decyzja techniczna jest wprost delegowana na projektanta jako jedyny podmiot zdolny do indywidualnej oceny ryzyka, konsekwencji awarii i specyfiki obiektu. Normy nie projektują konstrukcji, nie oceniają modeli obliczeniowych i nie ponoszą odpowiedzialności za skutki ich zastosowania. Pełnią rolę narzędzi referencyjnych, natomiast projektant pozostaje nadrzędnym arbitrem technicznym („sędzią technicznym”) w procesie projektowania.
Z tego względu wartości $\beta_{min}$ podane w Tab. 12 należy traktować jako poziomy odniesienia normowego, a nie wymagania bezwzględne. Ich przyjęcie, modyfikacja lub odrzucenie jest decyzją projektanta, ale każda korekta wymaga uzasadnienia merytorycznego.
Dla innych okresów odniesienia $T$ wymaganą niezawodność $\beta_{\min}$ można wyznaczyć z wartości $\beta_1=\beta(T=1\ \text{rok})$ ze wzoru
\begin{equation} \beta(T)=- \Phi^{-1} \left(1-\left[1-\Phi(-\beta_1)\right]^T\right) \tag{I.21}\label{I.21} \end{equation}
gdzie $^T$ jest znakiem potęgowania (nie transpozycji)
Dla systemów wysoko niezawodnych można stosować aproksymację (bardzo dokładną dla klas RC2 i RC3):
\begin{equation} \beta(T)\approx\beta_1-\frac{\ln T}{\beta_1}, \qquad (\beta_1 \ge 4) \tag{I.22}\label{I.22} \end{equation}
Momenty i kowariancje funkcji wektorów losowych
W dalszej części pracy operator wartości oczekiwanej zapisywany jest jako $\mathbb{E}$.
Indeks górny „mieczyk” $(\dagger)$ oznacza wartość sprzężoną wielkości lub funkcji zespolonej. W przypadku macierzy rzeczywistych wartość sprzężona jest macierzą transponowaną (indeks $(T)$). Formuły na momenty statystyczne funkcji dotyczą zarówno rzeczywistych, jak i zespolonych zmiennych skalarnych oraz wektorowych.
Poniżej zestawiono uogólnione definicje wartości oczekiwanej, wariancji, kowariancji i korelacji dla funkcji skalarnych i wektorowych zmiennych losowych, wykorzystywane w dalszych rozważaniach analitycznych metod FORM/SORM. Formuły te uogólniają wyrażenia zestawione w tab. 1 do postaci wymaganej w kolejnych rozdziałach pracy.
Losowe wektory $\mathbf{Y}$ oraz $\mathbf{Z}$ (w ogólnym przypadku zespolone) mają
wartości oczekiwane $\boldsymbol{\mu}_y=\mathbb{E}\mathbf{Y}$ oraz $\boldsymbol{\mu}_z=\mathbb{E}\mathbf{Z}$.
Obie wielkości są funkcjami rzeczywistego wektora losowego $\mathbf{X}$, który ma funkcję gęstości rozkładu prawdopodobieństwa $f_{\mathbf{X}}(\mathbf{x})$ oraz wartość oczekiwaną $\boldsymbol{\mu}_x=\mathbb{E}\mathbf{X}$.
\begin{equation} \mathbf{Y}=\Theta(\mathbf{X}), \qquad \mathbf{Z}=\Psi(\mathbf{X}) \tag{I.23}\label{I.23} \end{equation}
Wycentrowane zmienne $\mathbf{X}^0$, $\mathbf{Y}^0$, $\mathbf{Z}^0$:
\begin{equation} \mathbf{X}^0=\mathbf{X}-\boldsymbol{\mu}_x, \qquad
\mathbf{Y}^0=\mathbf{Y}-\boldsymbol{\mu}_y, \qquad
\mathbf{Z}^0=\mathbf{Z}-\boldsymbol{\mu}_z
\tag{I.24}\label{I.24}\end{equation}
Wartość oczekiwana funkcji wektora losowego $\Theta$ (analogicznie dla funkcji $\Psi$):
\begin{equation}
\boldsymbol{\mu}_y=\mathbb{E}[\mathbf{Y}] =\mathbb{E}[\Theta(\mathbf{X})] =\int_{\mathbb{R}^n}\Theta(\mathbf{x})\,f_{\mathbf{X}}(\mathbf{x})\,d\mathbf{x}
\tag{I.25}\label{I.25} \end{equation}
Moment drugiego rzędu (niecentralny) funkcji wektora losowego $\Theta$:
\begin{equation} \boldsymbol{\Gamma}_y=\mathbb{E}[\mathbf{Y}\mathbf{Y}^\dagger] =\mathbb{E}[\Theta(\mathbf{X})\,\Theta(\mathbf{X})^\dagger]
=\int_{\mathbb{R}^n}\Theta(\mathbf{x})\,\Theta(\mathbf{x})^\dagger
f_{\mathbf{X}}(\mathbf{x})\,d\mathbf{x} \tag{I.26}\label{I.26} \end{equation}
Wariancja (kowariancja własna) wektora $\mathbf{Y}$:
\begin{equation}
\mathbf{C}_{yy}=\operatorname{Var}(\mathbf{Y}) =\mathbb{E}[\mathbf{Y}^0\mathbf{Y}^{0\dagger}]=\int_{\mathbb{R}^n}
[\Theta(\mathbf{x})-\boldsymbol{\mu}_y]
[\Theta(\mathbf{x})-\boldsymbol{\mu}_y]^\dagger
f_{\mathbf{X}}(\mathbf{x})\,d\mathbf{x}
\tag{I.27}\label{I.27} \end{equation}
Wzajemny drugi moment:
\begin{equation} \boldsymbol{\Gamma}_{yz} =\mathbb{E}[\mathbf{Y}\mathbf{Z}^\dagger] =\mathbb{E}[\Theta(\mathbf{X})\,\Psi(\mathbf{X})^\dagger]
\tag{I.28}\label{I.28} \end{equation}
Kowariancja wzajemna:
\begin{equation} \mathbf{C}_{yz} =\operatorname{Cov}(\mathbf{Y},\mathbf{Z}) =\mathbb{E}[\mathbf{Y}^0\mathbf{Z}^{0T}] =\int_{\mathbb{R}^n} [\Theta(\mathbf{x})-\boldsymbol{\mu}_y] [\Psi(\mathbf{x})-\boldsymbol{\mu}_z]^T f_{\mathbf{X}}(\mathbf{x})\,d\mathbf{x} \tag{I.29}\label{I.29} \end{equation}
Dla przypadku $\Psi(\mathbf{X})\equiv\mathbf{X}$ otrzymujemy kowariancję wektorów $\mathbf{X}$ i $\mathbf{Y}$:
\begin{equation} \mathbf{C}_{xy} =\mathbb{E}[\mathbf{X}^0\mathbf{Y}^{0\dagger}] =\int_{\mathbb{R}^n}
(\mathbf{x}-\boldsymbol{\mu}_x) [\Theta(\mathbf{x})-\boldsymbol{\mu}_y]^\dagger f_{\mathbf{X}}(\mathbf{x})\,d\mathbf{x}
\tag{I.30} \label{I.30}\end{equation}
Wariancja zmiennej losowej skalarnej
W przypadku zmiennej skalarnej kowariancja staje się wariancją $ CovX = Var X = \sigma_x^2$.
Korelacja
Związek pomiędzy zmiennymi losowymi nazywa się korelacją.
Współczynnik korelacji zmiennych losowych $X$ i $Y$ o wartościach oczekiwanych $\mu_x$, $\mu_y$, odchyleniach standardowych $\sigma$.
\begin{equation} \rho_{XY} =\mathrm{Corr}\{X,Y\} =\frac{\mathrm{Cov}(X,Y)}{\sigma_X\sigma_Y} =\frac{\mathbb{E}[X^0Y^0]}{\sqrt{\mathbb{E}[(X^0)^2]}\,\sqrt{\mathbb{E}[(Y^0)^2]}} \tag{I.31}\label{I.31} \end{equation}
Rozwinięcie funkcji wektorowej g(X) w szereg Taylora
Złożoność obliczeń wartości oczekiwanych, dyspersji kowariancji nieliniowych funkcji zmiennych losowych powoduje, że powszechnie stosuje się aproksymację funkcji nieliniowej przez rozwinięcie w szereg Taylora.[16].Punkt aproksymacji $X^*$, czyli punkt w którym do nieliniowej funkcji aproksymowanej prowadzi się styczną należy dobrać tak, by uzyskać jak najlepsze przybliżenie interesującej wielkości. W przypadku obliczania wartości momentów statystycznych punkt $X^* =\mu_X $, ponieważ wokół tej wielkości zmienne losowa $X$, będzie przyjmowała wartości najczęściej. Natomiast w przypadku szacowania niezawodności punkt aproksymacji to NPP (najbardziej prawdopodobny punkt), który należy wyznaczać iteracyjnie.
Formuły rozwinięcia wokół punktu X*
Rozważmy zmienną wektorową
$\mathbf{Y}= [ Y_1, \, Y_2, \,\, \cdots , \, Y_j , \, \cdots , \, Y_m]^T_{(1×m)} = [Z_j], (j=1, \cdots m)$,
będącą nieliniową funkcją wektorową $\mathbf {g} (\mathbf{X})$ wektora
$\mathbf{X}= [ X_1, \, X_2, \,\, … , \, X_i , \, … , \, X_n]^T_{(1×n)} = [X_i], (i = 1, \cdots n)$, ($\ref{I.9}$).
Funkcja $\mathbf{g} = [g_1,\, g_2, \, \cdots, \, g_m]^T_{(1×m)}= [g_j], (j=1, \cdots m)$, jest w ogólności nieliniowa, a w przypadku jednowymiarowym pokazano ją na Rys. 4.

Rys. 4 Aproksymacja funkcji nieliniowej g(X) linią prostą lub parabolą
Funkcję nieliniową w określonym punkcie NPP o współrzędnych $(X,Y)^*$ można aproksymować prostą funkcją: linią prostą (FORM) , parabolą (SORM) lub krzywą wyższych rzędów.
W zapisie klasycznym funkcję na j-tą współrzędną wektora $\mathbf{Z}$ można zapisać w postaci $Z_j =g_j (\mathbf{X})$, a rozwinięcie tej funkcji wokół punktu $\mathbf{X}^*$ w szereg Taylora w postaci:
\begin{equation}Y_j = g_j (\mathbf{x})\approx g_j (\mathbf{X}^*) + \cfrac{1}{1!}\sum \limits_{i=1}^{n} \cfrac{\partial g_j (\mathbf{X})}{\partial X_i }\bigg|_{ \mathbf{X}= \mathbf{X}^*} \cdot (X_i-X_i^*) + \cfrac{1}{2!} \sum \limits_{i=1}^n \sum \limits_{k=1}^n \cfrac{\partial^2 g_j(\mathbf{X}) }{\partial X_i \partial X_k }\bigg|_{ \mathbf{X}= \mathbf{X}^*} (X_i -X_i^* )\cdot (X_k – X_k^*) +R \tag{I.32} \label{I.32} \end{equation}
Równanie ($\ref{I.32}$) jest wielomianem aproksymacyjnym, który w jawnej postaci podaje człon stały, liniowy i drugiego rzędu paraboli stycznej do funkcji oryginalnej w punkcie $\mathbf{X}^*$, a reszta R zawiera składniki rzędu wyższego niż drugi oraz. W zapisie macierzowym rozwinięcie w szereg Taylora przy pominięciu reszty R można przedstawić w postaci:
\begin{equation} \mathbf{Y} = \mathbf{g}(\mathbf{X}) \approx \mathbf{g}(\mathbf{X}^*) + \partial \mathbf{g}(\mathbf{X}^*) [ \mathbf{X}- \mathbf{X}^*] + 1/2 \cdot [ \mathbf{X}- \mathbf{X}^*] ^T \partial^2 \mathbf{g}(\mathbf{X}^*) [ \mathbf{X}- \mathbf{X}^*] \tag{I.33}\label {I.33} \end{equation}
gdzie wprowadzono oznaczenia:
$\mathbf{g}(\mathbf{X}^*)$ stały wektor kolumnowy zawierający wartości funkcji $\mathbf{g}$ w punkcie $\mathbf{X} = \mathbf{X}^*$
$\partial \mathbf{g}(\mathbf{X}^*)$ – macierz wrażliwości pierwszego rzędu, o wymiarze $(m×n)$, w tym samym punkcie.
$\partial^2 \mathbf{g}(\mathbf{X}^*)$ – macierz wrażliwości drugiego rzędu, o wymiarze $ [(m×n)×n]$ .
Macierz Jacobiego
Macierz $\partial \mathbf{g}$ jest nazywana macierzą Jacobiego $ \mathbf{J}_g$, której elementami są: $[J_g\_{ij}$, (i = 1, \cdots, n), ( j=1\cdots , m) są funkcje $[\partial g_j/ \partial X_i]_{(ij)}$:
\begin{equation} \mathbf{J}_g =
\begin{bmatrix} \cfrac{\partial g_1}{\partial X_1} & \cdots & \cfrac{\partial g_1}{\partial X_n} \\
\vdots & \ddots &\vdots \\ \cfrac{\partial g_m}{\partial X_1} & \cdots & \cfrac{\partial g_m}{\partial X_n} \\
\end{bmatrix}_{\mathbf{X}=\mathbf{X}^*}
\tag{I.34}\label{I.34} \end{equation}
Pierwszy wiersz macierzy $\mathbf{J}$ stanowią pochodne pierwszej funkcji $g_1$ po poszczególnych zmiennych $X_1 ,\cdots , X_n$.
Macierz (${34}$) można przedstawić w postaci wektora kolumnowego, którego współrzędnymi są gradienty $ \nabla g_i$ funkcji $g_i$ tworzących wektor $\mathbf{g}$
\begin{equation} \begin{bmatrix} \nabla g_1 \\ \vdots \\ \nabla g_m \end{bmatrix}_{\mathbf{X}=\mathbf{X}^*}\tag{I.35}\label{I.35} \end{equation}
gdzie:
\begin{equation} \nabla g_i = \begin{bmatrix} \cfrac{\partial g_i}{\partial X_1}, \cdots , \cfrac {\partial g_i}{ \partial X_n} \end{bmatrix} \tag{I.36}\label{I.36} \end{equation}
Macierz Hessego
Macierz $\partial^2 \mathbf{g}( \mathbf{X}^*)$ jest macierzą wrażliwości drugiego rzędu, ma wymiar $[(n×n)×m]$. Trójwymiarowa macierz jest złożona z pakietu „m” macierzy typu $\mathbf{H}_{g,j} $ ( j=1 \cdots, m), każda o wymiarze ($nxn$) i postaci
\begin{equation} \mathbf{H}_{g,i} = \begin{bmatrix}
\cfrac{\partial^2 g_i}{ \partial X_1^2} &\cfrac{ \partial ^2 g_i}{\partial X_1 \partial X_2} & \cdots & \cfrac{\partial^2 g_i}{\partial X_1 \partial X_n} \\
\cfrac{\partial^2 g_i}{ \partial X_2 \partial X_1} &\cfrac{ \partial ^2 g_i}{\partial X_2^2} & \cdots & \cfrac{\partial^2 g_i}{\partial X_2 \partial X_n} \\
\vdots & \vdots & \cdots & \ddots & \vdots \\
\cfrac{\partial^2 g_i}{ \partial X_n \partial X_1} &\cfrac{ \partial ^2 g_i}{\partial X_n^2} & \cdots & \cfrac{\partial^2 g_i}{\partial X_n \partial X_n} \\
\end{bmatrix}_{\mathbf{X}=\mathbf{X}^*} \tag{I.37}\label{I.37} \end{equation}
Macierze ($\ref{I.37}$) są nazywane macierzami Hessego.
Momenty probabilistyczne funkcji zmiennej losowej z linearyzacji
Wyznaczanie momentów probabilistycznych funkcji losowej poprzez linearyzację nie wymaga iteracji w odróżnieniu od szacowania niezawodności konstrukcji. Momenty probabilistyczne (statystyczne) najlepiej szacować poprzez rozwinięcie funkcji $\mathbf{Y} =g (\mathbf{X})$ podług formuły ($\ref{I.32}$) wokół wartości oczekiwanych argumentu $ \mathbf{X =\mu_X}$, a nie w otoczeniu punktu NPP, co prowadzi co formuły:
\begin{equation} \mathbf{Y} \approx g ( \mu_X ) + \cfrac{\partial g(X) }{\partial X }|_{\mu_X} (X- \mu_X )\tag{I.38}\label{I.38}\end{equation}
Po zastosowaniu operatora wartości oczekiwanej do funkcji liniowej ($\ref{I.38}$) otrzymamy następujące formuły linearyzacji probabilistycznej na wartość oczekiwaną i kowariancję wektora $\mathbf{Y}$ [17]:
\begin{equation} \mu_y \approx g ( \mu_x ) \tag{I.39} \label{I.39}\end{equation}
\begin{equation} \mathbf{C}_y \approx \mathbf{J}_g(\boldsymbol{\mu}_x)\,\mathbf{C}_x\,\mathbf{J}_g(\boldsymbol{\mu}_x)^\dagger \tag{I.40}\label{I.40} \end{equation}
gdzie $\mathbf{J}_g(\boldsymbol{\mu}_x)$ jest macierzą Jacobiego funkcji granicznej $\mathbf{g}(\mathbf{X})$, wyznaczoną w punkcie wartości oczekiwanej $\boldsymbol{\mu}_x$ wektora zmiennych losowych $\mathbf{X}$.
i który („po inżyniersku”) może być zapisany w postaci
\begin{equation} \mathbf{C}_y \approx g^{’} ( \mu_x ) \, \mathbf{C}_x \, g ^{’} ( \mu_x )^T \tag{I.41}\label{I.41}\end{equation}
gdzie:
$\mathbf{C}_x = Cov \mathbf{X}$, $\mathbf{C}_y = Cov\mathbf{Y}$ są macierzami kowariancji odpowiednio wektora $\mathbf{X}$ i $\mathbf{Y}$,
$g ^{’} ( \mu_x )=\cfrac{\partial g(X) }{\partial X }\big|_{x=\mu_X}$
Dokładność metody linearyzacji zależy od rozproszenia losowego zmiennej wejściowej. Jeśli $ \sigma_x \ll \mu_x$. to dokładność aproksymacji jest dobra i zmniejsza się wraz ze zmniejszaniem się nieliniowości funkcji
Procesy stochastyczne
Proces stochastyczny to rodzina zmiennych losowych indeksowana nielosowym parametrem, najczęściej związanym z czasem $t$. W przypadku dyskretnego zbioru indeksów (z dziedziny liczb całkowitych) proces stochastyczny jest ciągiem zmiennych losowych. W pracy używa się pojęcia „stochastyczny” w szerszym sensie jako „losowy”, a nie w wąskim sensie wyłącznie czasowym.
Przykłady procesów stochastycznych
$\mathbf{X}(\mathbf{t}) = [ R(t)\ \text{– wytrzymałość konstrukcji},\ E(t)\ \text{– obciążenia konstrukcji},\, g(t) \text{– funkcja graniczna}]^T$
gdzie $\mathbf{t} = [\text{czas},\ldots,(x_1,x_2,x_3)\ \text{– współrzędne przestrzenne}]^T$.
W zależności od natury procesów stochastycznych (pól losowych) wyróżnia się m.in. procesy:
1) stacjonarne (jednorodne), izotropowe i/lub ergodyczne,
2) o przyrostach nieskorelowanych, ortogonalnych lub niezależnych,
3) Markowa i/lub procesy normalne (gaussowskie).
Wybrane własności procesu stochastycznego (sens szeroki)
Pierwszy moment (trend) oraz drugi moment (kowariancja) procesu stochastycznego opisują średnie zachowanie procesu, charakteryzują jego zmienność oraz zależności czasowe i stanowią podstawę dalszych przybliżeń. W dalszej analizie momenty te będą wykorzystywane do: lokalnych aproksymacji liniowych, modelowania dynamiki w czasie, wprowadzenia procesów o skróconej pamięci (procesów Markowa) oraz opisu niezawodności konstrukcji w ujęciu probabilistycznym.
Niech $(\Omega,\mathcal{F},\mathbb{P})$ będzie przestrzenią probabilistyczną. Procesem stochastycznym nazywa się rodzinę zmiennych losowych
$X(t)={X(t,\omega): t\in T,\ \omega\in\Omega}$,
gdzie parametr $t$ jest uogólnionym czasem (może oznaczać także współrzędną przestrzenną lub inny parametr porządkujący), natomiast $\omega$ oznacza elementarne zdarzenie losowe, co jawnie wskazuje na losowy charakter zmiennej lub funkcji.
Dla ustalonego $t$ zmienna $X(t)$ jest zmienną losową.
Dla ustalonego $\omega$ funkcja $X(t,\omega)$ jest realizacją procesu.
Wartość oczekiwana (trend procesu)
Wartość oczekiwana procesu stochastycznego $X(t)$, nazywana również trendem lub funkcją średnią, zdefiniowana jest jako:
\begin{equation} \mu_X(t)=\mathbb{E}[X(t)] \tag{I.42}\label{I.42}\end{equation}
Funkcja $\mu_X(t)$ opisuje deterministyczną składową procesu i stanowi jego pierwszy moment.
Jeżeli $\mu_X(t)=0\quad \text{dla każdego } t$ , to proces nazywa się procesem o zerowej wartości średniej.
W praktyce często rozkłada się proces na postać:
$X(t)=\mu_X(t)+\tilde{X}(t)$ ,
gdzie $\tilde{X}(t)$ jest procesem o zerowej wartości średniej.
Kowariancja procesu stochastycznego
Drugim momentem procesu stochastycznego jest funkcja kowariancji
\begin{equation} C_X(t_1,t_2) =\mathbb{E}[(X(t_1)-\mu_X(t_1))(X(t_2)-\mu_X(t_2))] \tag{I.43}\label{I.43}\end{equation}
Funkcja kowariancji ($\ref{I.43}$) opisuje zależność liniową pomiędzy wartościami procesu w dwóch chwilach $t_1$ i $t_2$.
Dla $t_1=t_2=t$ funkcja kowariancji przechodzi w wariancję procesu
$\sigma_X^2(t)=C_X(t,t)$.
Wariancję $C_X(t_1,t_2)$ tego samego procesu w dwóch chwilach nazywa się autokowariancją.
Dla procesu wielowymiarowego $X(t)=[X_1(t),\ldots,X_n(t)]^T$ kowariancję
$C_{X_iX_j}(t_1,t_2)$ dla $i\neq j$ nazywa się interkowariancją.
Warunkowa wartość oczekiwana (szeroki sens)
Dla dwóch chwil $t_1,t_2$ warunkowa wartość oczekiwana procesu $X(t_1)$ przy zadanej realizacji $X(t_2)=x_2$ dana jest zależnością
\begin{equation} \mathbb{E}[X(t_1)\mid X(t_2)=x_2] =\mu_X(t_1) +\dfrac{C_X(t_1,t_2)}{C_X(t_2,t_2)}[x_2 – \mu_X(t_2)]\tag{I.44}\label{I.44}\end{equation}
Zależność ta jest ścisła dla procesów gaussowskich i stanowi projekcję liniową w sensie $L^2$ dla procesów niegaussowskich.
Procesy Markowa
Procesy Markowa są procesami stochastycznymi o skróconej pamięci. Proces $X(t)$ nazywa się procesem Markowa, jeżeli dla dowolnych chwil
$ t_0 < _1< ldots <t_n<t$ zachodzi
\begin{equation}P(X(t)\in A\mid X(t_n),\ldots,X(t_0))=P(X(t)\in A\mid X(t_n))\tag{I.45}\label{I.45}\end{equation}
Własność Markowa oznacza, że cała informacja istotna dla dalszej ewolucji procesu zawarta jest w jego aktualnym stanie, niezależnie od pełnej historii procesu. Jest to fundamentalna własność upraszczająca opis dynamiki procesu niezawodności konstrukcji budowlanych.
Proces Markowa w czasie dyskretnym
Jeżeli czas przyjmuje wartości dyskretne $t_n=n\Delta t$, proces Markowa można zapisać w postaci rekurencyjnej
\begin{equation} $X(n+1)=\Phi(X(n),\xi(n))$\tag{I.46}\label{I.46}\end{equation}
Postać rekurencyjna podkreśla iteracyjny charakter procesu Markowa, w którym każdy kolejny stan zależy wyłącznie od stanu poprzedniego.
Proces Markowa w czasie ciągłym
W czasie ciągłym proces Markowa opisuje się przez prawdopodobieństwa przejścia zależne od przyrostu czasu
\begin{equation} p_{ij}(\Delta t)=P(X(t+\Delta t)=j\mid X(t)=i)\tag{I.47}\label{I.47}\end{equation}
Losowy odstęp czasu pomiędzy zmianami stanu
Czas przebywania w stanie $i$ ma rozkład wykładniczy
$P(T_i>\Delta t)=\exp(-\lambda_i\Delta t)$.
gdzie $\lambda_i$ jest intensywnością opuszczenia stanu i. Rozkład wykładniczy spełnia własność braku pamięci, co stanowi probabilistyczne odzwierciedlenie własności Markowa.
Generator procesu Markowa
Generator procesu Markowa definiuje się jako
$q_{ij}=\lim_{\Delta t\to 0} P(X(t+\Delta t)=j\mid X(t)=i)/\Delta t$ dla $i\neq j$,
$q_{ii}=-\sum_{j\neq i}q_{ij}$.
Macierz generatora zawiera pełną informację o lokalnych własnościach dynamicznych procesu.
Równanie Chapmana–Kołmogorowa
Dla procesu Markowa zachodzi zależność składania prawdopodobieństw przejścia w postaci równania Chapmana -Kołmogorowa:
\begin{equation} $p_{ij}(\Delta t_1+\Delta t_2)=\sum_k p_{ik}(\Delta t_1)p_{kj}(\Delta t_2)\tag{I.48}\label{I.48} \end{equation}
Zależność ta znana jest jako równanie Chapmana–Kołmogorowa [18] i wyraża semigrupową własność operatorów przejścia.
Równania Kołmogorowa
Równania różniczkowe opisujące ewolucję prawdopodobieństw przejścia w czasie otrzymuje się jako granicę różniczkową równania Chapmana–Kołmogorowa. Mają one postać równań Kołmogorowa [19] .w przód oraz wstecz i stanowią podstawę analizy procesów Markowa w czasie ciągłym.
Znaczenie i estymacja intensywności
Intensywności $\lambda_{ij}$ opisują tempo degradacji lub inicjacji uszkodzeń i stanowią łącznik pomiędzy statyczną niezawodnością a analizą dynamiczną. Mogą być estymowane z czasów przebywania w stanie, danych dyskretnych w kroku $\Delta t$ lub z lokalnych aproksymacji momentowych.
Procesy Markowa umożliwiają opis ewolucji losowych systemów w czasie przy ograniczeniu informacji do bieżącego stanu. W analizie niezawodności konstrukcji pozwalają one na modelowanie degradacji, przejść pomiędzy stanami technicznymi oraz losowego czasu do zniszczenia. Stanowią tym samym naturalne uzupełnienie statycznych metod niezawodności i podstawę dalszych modeli dynamicznych.
W tab. 13 zestawiono ważne dla dalszych analiz własności ciągłego procesu stochastycznego Markowa, którego definicję podano w ($\ref{I.46}$) . Własności szeregów Markowa (procesów dyskretnych ) można wyprowadzić z podanych zależności, uwzględniając ($\ref{I.47}$) .
Tab. 13 Proces stochastyczny Markowa
\[\begin{array}{c|c|c|c|c}
\text{Pojęcie}& \text{Prawdopodobieństwo przejścia} & \text{Czas przebywania} & \text{Intensywność } \lambda& \text{Generator} \\
\hline \text{(1)} & (2) & (3) & (4) & (5) \\
\hline \text{Definicja}^{i)} & p_{ij}(\Delta t)=P(X(t+\Delta t)=j\mid X(t)=i)& P(T_i>\Delta t) = e^{-\lambda_i\Delta t}& \lambda_{ij}=\lim \limits_{\Delta t\to 0}
\dfrac{p_{ij}(\Delta t)}{\Delta t} & \begin{array}{l} q_{ij}=\lambda_{ij} \\ q_{ii}=-\sum \limits_{j\neq i}\lambda_{ij} \end{array} \\
\hline \text{Jednorodność}^{ii)} & p_{ij}(\Delta t_1)=p_{ij}(\Delta t_2) & \text{rozkład wykładniczy} & \lambda_{ij}=\text{const}& \mathbf{Q}=\text{const} \\
\hline \text{Składanie w czasie}^{iii)} & p_{ij}(\Delta t_1+\Delta t_2)=\sum \limits_k p_{ik}(\Delta t_1) p_{kj}(\Delta t_2) & -& -& – \\
\hline \text{Równania ewolucji}^{iv)}& -& -& -& \dfrac{d}{dt}\mathbf{P}(t)=\mathbf{P}(t)\mathbf{Q} \\
\hline\text{Stan pochłaniający}^{v)}& p_{jj} (\Delta t)=1& T_j=\infty & \lambda_{jj}=0& q_{jj}=0 \\
\hline \end{array} \]
Interpretacje inżynierskie:
i) Ewolucja stanu konstrukcji zależy wyłącznie od jej stanu bieżącego,
ii) Stałe warunki eksploatacji i degradacji konstrukcji w czasie,
iii) Możliwość łączenia kolejnych okresów użytkowania konstrukcji w analizie niezawodności czasowej. Zależność składania przejść jest równaniem Chapmana–Kołmogorowa ($\ref{I.48}$) .
iv) Zmiana prawdopodobieństwa stanu technicznego konstrukcji w czasie. Równania ewolucji są równaniami Kołmogorowa w przód dla procesu Markowa.
v) Stan zniszczenia (katastrofy) konstrukcji, z którego nie występuje powrót, to znaczy: $p_{jj}(\Delta t)$=1, $\lambda_{jj}=0$
Uwagi:
*) Prawdopodobieństwo przejścia $p_{ij} (\Delta t)$ opisuje zmianę stanu w przyroście czasu $\Delta t_i$ i jest niezależne od czasu absolutnego $t$.
Część IIa Niezawodnościowy model statyczny konstrukcji
Projektowanie probabilistyczne konstrukcji
Specyfika szacowania niezawodności konstrukcji budowlanych
W teorii konstrukcji budowlanych stosuje się trzy poziomy obliczeń do szacowania niezawodności systemów konstrukcyjnych. Dwa pierwsze poziomy opierają się na aproksymacyjnych metodach probabilistycznych, które uwzględniają złożoność konstrukcji składających się z setek lub tysięcy elementów, opisywanych przez skorelowane zmienne losowe. Nawet pełna znajomość łącznego rozkładu tych zmiennych wymagałaby przeprowadzenia milionów realizacji w symulacji Monte Carlo, co jest niezbędne przy ocenie bardzo wysokiej niezawodności budowli. Zastosowanie metod trzeciego poziomu, zapewniających taką dokładność, jest w praktyce projektowej bardzo trudne lub wręcz niemożliwe.
W metodach poziomu pierwszego probabilistyczną naturę niepewności parametrów materiałowych i obciążeń uwzględnia się poprzez zastosowanie systemu częściowych współczynników bezpieczeństwa, zgodnie z zaleceniami norm Eurokod i projektowania metodą stanów granicznych [11].
Częściowe współczynniki bezpieczeństwa są kalibrowane w systemie LRFD poprzez porównanie wyników projektowania z wynikami analiz niezawodności prowadzonych metodami wyższych poziomów, tak aby zminimalizować różnice pomiędzy docelową a rzeczywistą niezawodnością konstrukcji [20], [21], [22].
W metodach drugiego poziomu probabilistyczna natura problemu jest ujęta poprzez operowanie podstawowymi statystycznymi miarami niepewności parametrów materiałów i obciążeń, najczęściej wartością średnią zmiennej losowej, jej wariancją oraz miarami korelacji pomiędzy tymi parametrami. Metody te obejmują zbiór przybliżonych, najczęściej iteracyjnych procedur obliczeniowych, których celem jest oszacowanie prawdopodobieństwa awarii konstrukcji. Zazwyczaj wymagają one kontrolowanej idealizacji obszaru awarii, utożsamianego z uproszczoną reprezentacją rozkładów prawdopodobieństwa obciążeń oraz nośności materiałów [23].
Porównanie inżynierskich metod probabilistycznej analizy niezawodności
W tab. IIa-1 zestawiono oraz oceniono – pod względem dokładności obliczeń oraz kosztu obliczeniowego – najważniejsze, obecnie stosowane inżynierskie metody probabilistycznej analizy niezawodności, w tym metody drugiego poziomu. W praktyce projektowej metody FORM i SORM stanowią najczęściej standard obliczeniowy, natomiast klasyczne symulacje Monte Carlo (MC), szybkie metody symulacyjne oraz metody hybrydowe pełnią rolę referencyjną i weryfikacyjną, szczególnie w analizach rzadkich zdarzeń oraz konstrukcji o wysokich wymaganiach bezpieczeństwa.
Zestawienie ma charakter porównawczy i poglądowy. Oceny oznaczone symbolami gwiazdek odnoszą się do typowych zastosowań inżynierskich w budownictwie i mechanice konstrukcji oraz zakładają poprawne przygotowanie danych wejściowych (normalizacja, dekorelacja, dobór rozkładów brzegowych). Nie stanowią one rankingu uniwersalnego – wybór metody powinien być każdorazowo uzależniony od liczby zmiennych losowych, stopnia nieliniowości funkcji granicznej, wymaganej dokładności obliczeń oraz dostępnych zasobów obliczeniowych.
Tab. IIa-1 Porównanie metod probabilistycznej analizy niezawodności oraz transformacji zmiennych losowych
\[\begin{array}{|l|l|l|c|c|}
\hline\textbf{Metoda} & \textbf{Idea / transformacja} & \textbf{Typowe zastosowanie} & \textbf{Dokł.} & \textbf{Koszt} \\ \hline
\text{FORM} & \text{Liniowa aproksymacja } g(\mathbf{X}) \text{ w MPP} & \text{Analiza inżynierska, szybkie oszacowania} & \star\star\star\star & \star\star\star\star\star \\ \hline
\text{SORM} & \text{Krzywizna } g(\mathbf{X}) \text{ (III rząd)} & \text{Nieliniowe problemy } g, \text{ większa dokładność} & \star\star\star\star\star & \star\star\star\star \\ \hline
\text{MC (klasyczne)} & \text{Symulacja losowa} & \text{Weryfikacja, złożone } g(\mathbf{X}) & \star\star\star\star\star & \star\star \\ \hline
\text{MC szybkie (IS, Subset)} & \text{Próbkowanie w obszarze awarii} & \text{Rzadkie zdarzenia } (\beta>4) & \star\star\star\star\star & \star\star\star\star \\ \hline
\text{RSM} & \text{Meta-model } g(\mathbf{X}) & \text{Optymalizacja, analiza wstępna} & \star\star\star & \star\star\star\star\star \\ \hline
\text{Nataf / Copula Gaussa} & \text{Normalizacja marginesów + korelacja} & \text{FORM/SORM (standard)} & \star\star\star\star\star & \star\star\star\star \\ \hline
\text{Rosenblatt} & \text{Transformacja warunkowa (dokładna)} & \text{Analizy referencyjne} & \star\star\star\star\star & \star\star\star \\ \hline
\text{Rank}\rightarrow\text{Gauss} & \text{Rangi }\rightarrow\text{ kwantyle } \mathcal{N}(0,1) & \text{Pola losowe} & \star\star\star\star & \star\star\star\star\star \\ \hline
\text{K–L + normalizacja} & \text{Dekorelacja pola + mapowanie } \mathcal{N}(0,1) & \text{Stochastyczna FEM} & \star\star\star & \star\star\star\star \\ \hline
\text{Kolokacja Murzewski} & \text{Dopasowanie lokalne w NPP / }\mu & \text{Zastosowania inżynierskie} & \star\star\star & \star\star\star\star \\ \hline
\end{array} \]
Uwagi do Tab. IIa-1:
1) Liczba gwiazdek oznacza ocenę względną ( – najwyższa, – niska).
2) Oceny odnoszą się do typowych zastosowań inżynierskich i nie stanowią rankingu uniwersalnego, lecz ocenę względną dokładności i kosztu obliczeniowego w praktyce inżynierskiej.
3) Dokładność metod przybliżonych (FORM, SORM, RSM, kolokacja) zależy od stopnia nieliniowości funkcji granicznej, liczby zmiennych losowych oraz jakości transformacji probabilistycznej (normalizacja, dekorelacja).
4) Koszt obliczeniowy odnosi się do liczby wywołań funkcji granicznej $g(\mathbf{X})$.
5) Zestawienie ma charakter poglądowy i nie stanowi rankingu uniwersalnego.
6) Szczegółowe porównanie metod obliczeń niezawodnościowych, obejmujące ichcharakterystykę, zalety, ograniczenia oraz aspekty implementacyjne, zestawiono w tabeli uzupełniającej poniżej,
7) Zestawienie metod probabilistycznej analizy niezawodności (Tab. IIa-1) ma charakter porównawczy i inżynierski, a nie rankingowy.
8) Oceny metod należy zawsze interpretować w kontekście jakości danych wejściowych, dokładności modeli obliczeniowych oraz rzeczywistej złożoności analizowanego systemu konstrukcyjnego.
W praktyce projektowej i eksploatacyjnej konstrukcji budowlanych – w szczególności konstrukcji żelbetowych lub drewnianych – dostępne dane materiałowe, geometryczne i obciążeniowe charakteryzują się znaczną niepewnością, a modele obliczeniowe (w tym metody elementów skończonych) mają ograniczoną dokładność, która dodatkowo maleje wraz ze wzrostem liczby elementów i stopnia złożoności układu. W takich warunkach stosowanie metod probabilistycznych o bardzo wysokiej dokładności matematycznej może prowadzić do pozornej precyzji, nieuzasadnionej rzeczywistą jakością danych.
Z tego względu w wielu zastosowaniach inżynierskich metody uproszczone, analityczne i korelacyjne, operujące na granicach oszacowań niezawodności oraz modelach systemowych (szeregowych, równoległych i mieszanych),okazują się wystarczające i bardziej adekwatne niż metody symulacyjne wysokiego poziomu. Przykładem takiego podejścia jest metoda uogólnionej korelacji zaproponowana przez Kudźisa [M9], przeznaczona do oceny niezawodności konstrukcji żelbetowych o dużej redundancji i ograniczonej jakości danych wejściowych.
Metody FORM i SORM, podobnie jak metody symulacyjne Monte Carlo należy w tym kontekście traktować przede wszystkim jako narzędzia odniesienia, kalibracji i analiz wstępnych, a nie jako rozwiązania uniwersalne.
Przygotowanie wektora systemu X do obliczeń 2. poziomu
Metody 2. poziomu szacowania niezawodności konstrukcji budowlanych wymagają wstępnego przygotowania wektora zmiennych losowych systemu $\mathbf{X}$ ($\ref{I.9}$), złożonego ze składowych $X_i \quad (i=1,\cdots,N)$, które w ogólności:
– mają różne brzegowe rozkłady prawdopodobieństwa (ang. marginal distributions),
– są nienormalne,
– są wzajemnie skorelowane.
Wektor $\mathbf{X}$ należy poddać transformacji $\mathbf{T}$ takiej, aby procedura FORM/SORM była przeprowadzona na wektorze o rozkładzie normalnym, wycentrowanym i o nieskorelowanych współrzędnych losowych.
Transformacja $\mathbf{T} : \mathbf{X} \rightarrow \mathbf{U}$ powinna zachować prawdopodobieństwo awarii, tj. spełniać warunek
$$p_f = \int\limits_{\Omega_f} f_X(\mathbf{x})\, d\mathbf{x} = \int\limits_{\Delta_f} f_U(\mathbf{u})\, d\mathbf{u} $$
gdzie:
$f_X(\mathbf{x})$, $f_U(\mathbf{u})$ – funkcje gęstości rozkładu oryginalnego wektora $\mathbf{X}$ oraz docelowego wektora $\mathbf{U} \sim \mathcal{N}(0,1)$,
$\Omega_f$, $\Delta_f$ – obszary awarii odpowiednio w przestrzeni oryginalnej oraz w przestrzeni $\mathbf{U}$.
Transformacja przestrzeni $\mathbf{T}$ nie powinna zmieniać wartości $p_f$ i może być złożona z trzech transformacji składowych:
$\mathbf{T1}: \mathbf{X} \mapsto \mathbf{Z}$ – normalizacja rozkładów brzegowych (transformacja do rozkładu normalnego),
$\mathbf{T1^0}: \mathbf{Z} \mapsto \mathbf{Z}^0$ – standaryzacja (wycentrowanie i skalowanie),
$\mathbf{T2}: \mathbf{Z}^0 \mapsto \mathbf{U}$ – dekorelacja wektora $\mathbf{Z}^0$, czyli diagonalizacja macierzy kowariancji.
Ponieważ normalizacja jest przekształceniem nieliniowym i zmienia strukturę korelacji, dekorelacja wykonana przed normalizacją traci sens. Kolejność transformacji nie jest dowolna i powinna mieć postać:
\begin{equation} \mathbf{T} = \mathbf{T1} \rightarrow \mathbf{T1^0} \rightarrow \mathbf{T2} \tag{IIa.1}\label{IIa.1}\end{equation}
W praktyce, np. w metodzie Natafa, operacje normalizacji i standaryzacji realizowane są w jednym kroku $\mathbf{T1}$ (łącznie z $\mathbf{T1^0}$) [24].
Problem transformacji $\mathbf{X} \rightarrow \mathbf{U}$ był przedmiotem licznych prac, m.in.: Hohenbichler–Rackwitz (1981) [25], Engelund–Rackwitz (1993) [26], Stocki (1999, 2010) [27], [28],Kolanek (2006) [29], Knabel (2004) [30], Winkelmann (2013) [31], oraz liczne inne prace.
Normalizacja – mapowanie rozkładu $X$ do normalnej przestrzeni $Z$Mapowanie dystrybuanty zmiennej losowej
Transformację $\mathbf{42}$ zmiennej losowej $X_i$ na zmienną losową $Z_i$ można opisać wyrażeniem:
\begin{equation} z_i = \Phi_{Z_i}^{-1} \left[ F_{X_i}(x_i) \right] \tag{IIa.2}\label{IIa.2}\end{equation}
Natomiast odwrotne mapowanie przedstawia wzór:
\begin{equation} x_i = F_{X_i}^{-1} \left[ \Phi_{Z_i}(z_i) \right] \tag{IIa.3}\label{IIa.3} \end{equation}
O normalizacji zmiennej losowej mówimy wówczas, gdy mapowanie prowadzone jest do dystrybuanty normalnej $\Phi_{Z_i}(z_i)$, czyli w kierunku uzyskania zmiennej $Z_i$ o rozkładzie normalnym. Taką operację zapisujemy w postaci
\begin{equation} X \mapsto U \sim \mathcal{N}(0,1) \quad \text {z zachowaniem izoprawdopodobieństwa} F_X(x) = \Phi_Z(z) \tag{IIa.4}\label{IIa.4} \end{equation}
Najczęściej stosowane metody normalizacji zmiennych stanu (transformacja $\mathbf{42}$) zestawiono w tab. IIa.1.
Zasada Rosenblatta
Klasyczna procedura normalizacji Rosenblatta (1952) [32], przekształca kolejne składowe skorelowanego wektora losowego $\mathbf{X}$ zgodnie z następującą sekwencją transformacji izoprawdopodobieństwowej:
\begin{equation}\begin{cases}
\Phi(u_1) = F_{X_1}(x_1), \\
\Phi(u_2) = F_{X_2}(x_2 \mid x_1), \\
\Phi(u_3) = F_{X_3}(x_3 \mid x_1, x_2), \\
\quad \vdots \\
\Phi(u_i) = F_{X_i}(x_i \mid x_1, x_2, \ldots, x_{i-1}),
\end{cases} \tag{IIa.5}\label{IIa.5} \end{equation}
gdzie $F_{X_i}(x_i \mid x_1, x_2, \ldots, x_{i-1})$ oznacza dystrybuantę
warunkowego rozkładu prawdopodobieństwa zmiennej losowej $X_i$
pod warunkiem zajścia zdarzenia
$\{X_1=x_1, X_2=x_2, \ldots, X_{i-1}=x_{i-1}\}$.
Dystrybuantę warunkową można zapisać w postaci:
\begin{equation} F_{X_i}(x_i \mid x_1, x_2, \ldots, x_{i-1}) =\int_{-\infty}^{x_i} \frac{f_{X_1,\ldots,X_i}(x_1, x_2, \ldots, x_{i-1}, t)}{f_{X_1,\ldots,X_{i-1}}(x_1, x_2, \ldots, x_{i-1})}
\, dt, \tag{IIa.6}\label{IIa.6} \end{equation}
gdzie:
$f_{X_1,\ldots,X_i}(\cdot)$ jest wspólną funkcją gęstości prawdopodobieństwa rozkładu zmiennych $(X_1,\ldots,X_i)$,
$f_{x_i}(x_1,x_2,\ldots,x_i)$ – funkcja gęstości prawdopodobieństwa rozkładu brzegowego.
Transformacja Rosenblatta nie jest jednoznaczna. Kolejność transformacji składowych wektora losowego $\mathbf{X}$ można wybrać na $n $ sposobów. Kolejność ta wpływa na kształt obszaru awarii w gaussowskiej przestrzeni standardowej $\mathbf{U}$. Z kolei od kształtu obszaru awarii w tej przestrzeni zależy efektywność algorytmów analizy niezawodności, w szczególności metod FORM/SORM oraz algorytmów symulacyjnych ukierunkowanych na rzadkie zdarzenia.
Jeżeli dystrybuanta $F_{X_i}$ nie ma postaci analitycznej, transformacja Rosenblatta wymaga zastosowania całkowania numerycznego,co znacząco zwiększa koszt obliczeń [33], [34].
Niejednoznaczność transformacji Rosenblatta daje jednak możliwość doboru kolejności zmiennych z punktu widzenia dokładności oraz kosztu obliczeń. Dobór ten powinien być analizowany indywidualnie dla każdego rozpatrywanego zagadnienia inżynierskiego.
W praktyce zasadę Rosenblatta stosuje się w ten sposób, że transformację przeprowadza się oddzielnie dla każdej składowej wektora $\mathbf{X}$, to znaczy kolejno dla każdej zmiennej losowej $X_i$, a wektor $\mathbf{Z}$ składa się z tak otrzymanych zmiennych $Z_i$, gdzie $i=1,\ldots,n$, a $n$ jest liczbą zmiennych stanu.
Ma to istotne konsekwencje praktyczne:
1) transformacja normalizacji $\mathbf{42}$ nie jest wrażliwa na zróżnicowanie typów rozkładów brzegowych poszczególnych składowych wektora $\mathbf{X}$,
2) normalizacja poszczególnych zmiennych $X_i$ może być prowadzona różnymi metodami, dostosowanymi do typu rozkładu brzegowego danej zmiennej,
3) w przypadku, gdy normalizację zmiennej $X_i$ można przeprowadzić analitycznie, należy to wykorzystać w celu ograniczenia kosztu transformacji oraz poprawy stabilności obliczeń.
Oprócz transformacji Rosenblatta do normalizacji wektora stanu konstrukcji stosowane są również inne procedury transformacji,w szczególności: transformacja Hohenbichlera–Rackwitza [35], transformacja Natafa [24], transformacja Liu–Der Kiureghiana [36], transformacje analityczne wyższych rzędów, np. metoda zaproponowana przez Lu i in. [37], oraz liczne inne modyfikacje i uogólnienia opracowane na potrzeby analizy niezawodności konstrukcji.
Normalizacja – mapowanie analityczne
Normalizacja analityczna jest taką transformacją $T^A$,
$T^A : X \mapsto Z$, czyli $Z = T^A(X)$,
dla której postać $T^A(\cdot)$ jest znana jawnie (w postaci wzoru), bez konieczności numerycznego odwracania dystrybuanty.
Związek pomiędzy transformacją $T^A$ a estymatorami parametrów rozkładu jest ścisły. Analityczne formuły estymatorów parametrów rozkładów, wyrażone przez estymatory dystrybuanty empirycznej (z próby), są jednocześnie formułami normalizacji analitycznej.
Przypadek trywialny : normalizacjia rozkładu Gaussa
Dla trywialnego przypadku rozkładu normalnego (Gaussa) $X \sim \mathcal{N}(\mu_X,\sigma_X^2)$
estymatorami parametrów rozkładu, wyznaczanymi z próby są:
– średnia z próby $m_X$ jako estymator wartości oczekiwanej $\mu_X$,
– odchylenie standardowe z próby $s_X$ jako estymator $\sigma_X$,
co można zapisać w postaci:
\begin{equation} \mu_X \approx m_X = \overline{x}= \frac{1}{N} \sum\limits_{i=1}^{N} x_i \tag{IIa.7}\label{IIa.7} \end{equation}
\begin{equation}\sigma_X \approx s_X = \sqrt{\frac{1}{N-1} \sum\limits_{i=1}^{N} (x_i – m_X)^2} \tag{IIa.8}\label{IIa.8} \end{equation}
co jest równoważnie zapisowi:
\begin{equation} \sigma_X \approx s_X = \sqrt{\frac{1}{N-1} \sum\limits_{i=1}^{N} x_i^2 – m_X^2} \tag{IIa.9}\label{IIa.9} \end{equation}
\begin{equation} v_X = \frac{s_X}{m_X} \tag{IIa.10}\label{IIa.10} \end{equation}
gdzie:
$x_i \ (i=1,\ldots,N)$ – wyniki pomiarów z próby o liczebności $N$,
$v_X$ – współczynnik zmienności zmiennej losowej $X$.
Transformacja $T^A$ w tym przypadku polega na przyjęciu estymatorów parametrów rozkładu w postaci:
$T^A : [\, \mu_X \approx m_X;\ \sigma_X \approx s_X \,]$,
czyli zastąpieniu nieznanych parametrów rozkładu ich estymatorami z próby, co można zapisać symbolicznie jako:
$T^A : Z = X(m_X, s_X^2)$.
W przypadku normalizacji połączonej ze standaryzacją otrzymuje się zmienną o rozkładzie normalnym standaryzowanym:
$$ T^A : U = \cfrac{X – m_X}{s_X}.$$
Normalizacja analityczna rozkładów najczęściej spotykanych w teorii konstrukcji budowlanych
Dla najczęściej spotykanych rozkładów zmiennych losowych w konstrukcjach budowlanych możliwe jest przeprowadzenie normalizacji analitycznej bez stosowania metod numerycznych zestawionych w tab. IIa.1, co istotnie zmniejsza koszt obliczeń oraz czas ich wykonania. Estymatory parametrów takich rozkładów zestawiono w tab. 6. Podane tam formuły stanowią bezpośrednio parametry rozkładu normalnego otrzymywane w transformacji $T^A$. Formuły normalizacji analitycznej pokrywają się z estymatorami parametrów rozkładów wyznaczanymi metodą momentów (zestawionymi w tab. 7) lub metodą największej wiarygodności (zestawionymi w tab. 8). Metoda największej wiarygodności daje z reguły estymatory o lepszych własnościach statystycznych oraz dokładniejszą normalizację, w szczególności w obszarach „ogonów” rozkładów, w porównaniu z metodą momentów.
W przykładzie 5 przedstawiono wyprowadzenie formuł normalizacji analityczne rozkładu log-normalnego, Gumbela min oraz Weibulla max i min.
Redukcja zmiennych stanu konstrukcji
Istota i znaczenie redukcji zmiennych stanu
Redukcja wstępnie zidentyfikowanych i zdefiniowanych zmiennych losowych systemu $\mathbf{XO}$ jest wymagana przez algorytmy obliczeń niezawodności konstrukcji, Wymóg ten jest w pełni analogiczny do procedury konsolidacji modeli w mechanice budowli, stosowanej w celu usunięcia osobliwości macierzy sztywności wynikającej z nadmiarowych stopni swobody.
W ujęciu probabilistycznym redukcja zmiennych losowych jest często określana jako eliminacja redundancji, rozumianej jako nadmiarowość informacji o losowym systemie. Redundancja ta może mieć charakter funkcyjny, geometryczny, fizyczny lub statystyczny i prowadzi do osobliwości macierzy korelacji lub kowariancji, co uniemożliwia bezpośrednie zastosowanie algorytmów niezawodnościowych .
Celem redukcji zmiennych losowych jest pozostawienie w modelu niezawodnościowym wyłącznie zmiennych istotnych, tj. takich, które w sposób niezależny i fizycznie uzasadniony determinują położenie powierzchni granicznej oraz punktu najbardziej prawdopodobnego zniszczenia.
Przyjęcie zastępczych zmiennych stanu po redukcji umożliwia ujednolicenie opisu niepewności o różnej naturze oraz powiązanie ich z geometryczną interpretacją niezawodności w przestrzeni losowej (np Anatoulus (20025) [38]. Zmienne zastępcze $X_i$ $(i=1,\ldots,5)$ należy wytypować spośród zmiennych wnoszących największy wkład do niepewności losowych w danej grupie, przy jednoczesnym włączeniu w nie wpływu innych, mniej istotnych zmiennych. Wybór zmiennych , ang. feature selection np [39] powinien być dokonywany z wykorzystaniem metod znanych z analizy danych, takich jak metody filtrujące, ang. filter methods [40], metody oparte na osadzeniach (embedded methods) oraz metody opakowujące, ang wrapper methods [41] . Pozwala to na eliminację zmiennych nieistotnych z punktu widzenia niezawodności, co zmniejsza koszt obliczeń i poprawia stabilność modeli, zwłaszcza modeli liniowych, takich jak regresja liniowa i logistyczna.
Redukcja wektora stanu
Wektor wstępnie zidentyfikowanych i zdefiniowanych zmiennych losowych systemu oznaczmy jako
$\mathbf{XO}= [ XO_1, \, XO_k, \, XO_j \ldots, \, XO_{n_0} ] ^T$
a wektor stanu ($\ref{I.9}$) po redukcji i kierowany do procedur niezawodnościowych jako
$\mathbf{X}= [ X_1, \, X_k, \, \ldots, \, X_n ] ^T \quad (n <n_0)$
Redukcja liczby losowych zmiennych zgromadzonych w wektorze $\mathbf{XO}$ musi doprowadzić do tego, aby wynikowy wektor stanu $\mathbf{X}$ był wektorem minimalnym, niesprzecznym i fizycznie istotnym, spełniającym jednocześnie następujące warunki:
1) Warunek istotności fizycznej i geometrycznej względem funkcji granicznych mechanizmów zniszczenia, który można zapisać w postaci
\begin{equation} \forall X_i \in \mathbf{X} \quad \Longleftrightarrow \quad \frac{\partial g(\cdot)}{\partial X_i} \neq 0 \text{ oraz } X_i \text{ nie jest funkcją innej zmiennej} \tag{IIa.11}\label{IIa.11} \end{equation}
Warunek ($\ref{IIa.11}$) oznacza, że każda zmienna stanu musi wpływać na wartość funkcji granicznej w sposób bezpośredni i niezależny. Zmienne, które nie występują w funkcjach granicznych lub występują wyłącznie jako funkcje innych zmiennych, nie spełniają kryterium istotności fizycznej i nie powinny być traktowane jako odrębne zmienne stanu w analizie niezawodnościowej.
2) Warunek istotności losowej, rozumiany jako brak redundancji statystycznej w zbiorze zmiennych stanu
\begin{equation} \det\left(\boldsymbol{\rho}_{\mathbf{X}}\right) \neq 0 \tag{IIa.12}\label{IIa.12} \end{equation}
gdzie $\boldsymbol{\rho}_{\mathbf{X}}$ oznacza macierz korelacji wektora zmiennych stanu. Spełnienie warunku ($\ref{IIa.12}$) oznacza, że macierz korelacji, a w konsekwencji macierz kowariancji, nie jest osobliwa i nie zawiera informacji nadmiarowej. Niespełnienie tego warunku wskazuje na istnienie zależności funkcyjnych lub bardzo silnych korelacji pomiędzy zmiennymi, które powodują degenerację przestrzeni losowej i uniemożliwiają poprawne stosowanie metod niezawodnościowych .
Jeżeli którykolwiek z warunków ($\ref{IIa.11}$) lub ($\ref{IIa.12}$) nie jest spełniony, wówczas zmienną $X_i$ należy wykluczyć z wektora zmiennych systemu. Źródło niepewności związane z tą zmienną powinno zostać uwzględnione pośrednio poprzez inną zmienną $X_j$, która przejmuje jej wpływ na funkcję graniczną. Zmienna $X_j$ pełni wówczas rolę zmiennej zastępczej, będącej nośnikiem skumulowanej informacji losowej pochodzącej od jednej lub kilku zmiennych mniej istotnych. Takie podejście prowadzi do uproszczenia modelu probabilistycznego przy jednoczesnym zachowaniu jego fizycznej interpretowalności i poprawności metodycznej w algorytmach niezawodnościowych.
Eliminacja zmiennej losowej $X_k$ z wektora stanu wymaga korekty parametrów pozostałych zmiennych, gdy spełniony jest co najmniej jeden z warunków dla eliminowanej zmiennej:
- jest składnikiem innej zmiennej losowej, lub
- jest nośnikiem istotnej części wariancji innej zmiennej, lub
- stanowi niezależne źródło losowości mechanizmu odpowiedzi konstrukcji.
Sprowadzenie zmiennych do porównywalnej przestrzeni probabilistycznej ( normalizacja)
W modelu losowym konstrukcji zmienne pierwotne $\mathbf{XO}$ mogą mieć różne rozkłady brzegowe (normalne, lognormalne, ekstremalne, empiryczne).Eliminacja zmiennej $XO_k$ i przeniesienia jej losowości do innej zmiennej $XO_j$ wymaga bezpośredniego porównywania wpływu obu zmiennych na niezawodność systemu.
Agregacja losowości zmiennych o różnych rozkładach jest poprawna wtedy i tylko wtedy, gdy jest wykonywana w przestrzeni zmiennych o tym samym rozkładzie referencyjnym. Z tego powodu redefinicja parametrów zmiennych po redukcji musi być poprzedzona sprowadzeniem zmiennych do wspólnej, porównywalnej przestrzeni probabilistycznej. Jedyną przestrzenią, w której dowolne rozkłady ciągłe mogą być porównywane bez utraty informacji probabilistycznej, jest przestrzeń zmiennych o rozkładzie jednostajnym lub standardowym normalnym. W praktyce przyjmuje się przestrzeń zmiennych o rozkładzie standardowym normalnym: $ Z \sim \mathcal{N}(0,1)$., co uzyskuje się w procesie normalizacji.
Eliminacja mniej istotnych zmiennych ze wstępnie zidentyfikowanego i zdefiniowanego wektora zmiennych losowych systemu $\mathbf{XO}$ wymaga indywidualnej analizy zagadnienia z warunku modyfikacji parametrów losowych zmiennych pozostawionych w wektorze stanu.
Redefinicja parametrów zmiennych po eliminacji $X_k$ nie jest procedurą obliczeniową, lecz elementem budowy modelu losowego. Algorytm ten jest niezależny od metody analizy niezawodności i musi być wykonany przed zastosowaniem jakiegokolwiek narzędzia obliczeniowego. Konieczność redefinicji parametrów zmiennych pozostałych po eliminacji $X_k$ zależy nie od samego faktu eliminacji, lecz od roli, jaką $X_k$ pełni w strukturze losowości systemu i formalnie redefinicja parametrów zależy od stopnia niesienia przez zmienną $X_k$ losowości nieredukowalnej.
Algorytm wyboru zmiennych do redukcji
Ocena istotności zmiennych losowych przedstawiony wyżej jest uznaniowy. W celu zobiektywizowania oceny istotności proponuje się pomocnicy algorytm oparty na mierze probabilistycznej obszaru zniszczenia. Przy tym wielowymiarowy problem redukcji zmiennych sprawdzamy do problemu eliminacji jednej zmiennej $X_k$ ( skrócone oznaczenie $XO_k$) na rzecz jednej zmiennej zastępczej $X_j$, co po normalizacji zmiennych , sprowadza się – do problemu dwuwymiarowego Gaussa z korelacją.
Niech $\mathcal{F}$ będzie ustalonym obszarem zniszczenia.
Przyjmujemy, że:
- wszystkie zmienne zostały poddane normalizacji rangowej,
- analizowana jest eliminacja jednej zmiennej $X_k$,
- na rzecz jednej zmiennej zastępczej $X_j$,
- pozostałe zmienne są traktowane jako tło losowe.
Dla zmiennych $X_j$ oraz $X_k$ definiujemy zmienne znormalizowane:
$\mathbf{Z}_{jk} \sim \mathcal{N}(\mathbf{0},\boldsymbol{\Sigma}_{jk})$
gdzie macierz korelacji wynosi $ \boldsymbol{\Sigma}_{jk} = \begin{bmatrix} 1 & \rho_{jk} \\\rho_{jk} & 1\end{bmatrix}.$
Pełny obszar zniszczenia $\mathcal{F}$ rzutujemy na przestrzeń $\mathbf{Z}_{jk}$, definiując zbiór marginalny:
$ \mathcal{F}_{jk} = \left\{(z_j,z_k) : \exists\,\mathbf{z}_{\setminus\{j,k\}} \;\text{takie, że}\; (\mathbf{z}_{jk},\mathbf{z}_{\setminus\{j,k\}})\in\mathcal{F} \right\}.$
Referencyjna miara niezawodności w przestrzeni pary zmiennych wynosi: $P_f^{(jk)} =\iint_{\mathcal{F}_{jk}} \varphi_2(z_j,z_k;\rho_{jk})\, dz_j \, dz_k,$
Eliminację zmiennej $X_k$ modelujemy przez warunkowanie: $ Z_k = 0 \quad \text{(wartość centralna po normalizacji)}$, otrzymując jednowymiarową miarę zastępczą:
$ P_f^{(j)} = \int_{\mathcal{F}_{j}} \varphi_1(z_j) \, dz_j,$
gdzie $\mathcal{F}_{j}$ jest rzutem zbioru $\mathcal{F}_{jk}$ na oś $Z_j$.
Definiujemy funkcjonał utraty informacji przy eliminacji $X_k$: $ \mathcal{L}_{k \to j} = \left|P_f^{(jk)} – P_f^{(j)}\right|.$
Funkcjonał $\mathcal{L}_{k \to j}$ zależy wyłącznie od:
- rozkładów brzegowych $X_j$, $X_k$,
- korelacji $\rho_{jk}$,
- geometrii zbioru $\mathcal{F}_{jk}$.
Kryterium eliminacji
Zmienna $X_k$ może zostać wyeliminowana bez redefinicji parametrów zmiennej $X_j$, jeżeli $ \mathcal{L}_{k \to j} \le \varepsilon_P.$, a jeżeli $ \mathcal{L}_{k \to j} > \varepsilon_P,$, to konieczne jest wprowadzenie zmiennej zastępczej.
Zmienna zastępcza
Zmienną zastępczą definiuje się bezpośrednio w przestrzeni Gaussa $ Z_j^\ast = Z_j + \alpha Z_k,$, gdzie parametr $\alpha$ jest wyznaczany z warunku minimalizacji:
$ \min_{\alpha} \left| \iint_{\mathcal{F}_{jk}}\varphi_2(z_j,z_k;\rho_{jk}) \, dz_j \, dz_k – \int_{\mathcal{F}_{j^\ast}} \varphi_1(z_j^\ast)\, dz_j^\ast\right|.$
Jeżeli zachodzi potrzeba interpretacji fizycznej, zmienną zastępczą w przestrzeni pierwotnej definiuje się jako $X_j^\ast = F_{X_j}^{-1} \left(\Phi(Z_j^\ast)\right).$
Rozkład $X_j^\ast$ jest nośnikiem skumulowanej losowości $X_j$ oraz $X_k$.
Pokazany algorytm redukcji zmiennych losowych może być poprawnie przeprowadzony w przestrzeni dwuwymiarowej Gaussa, bez utraty informacji o niezawodności, o ile decyzja dotyczy eliminacji jednej zmiennej na rzecz jednej zmiennej zastępczej. Algorytm wyboru zmiennych do redukcji oraz dobór parametrów zmiennej zastępczej może być uogólniony na wielowymiarową przestrzeń losową, obejmującą cały wektor zmiennych stanu konstrukcji. Nie jest to jednak w zakresie tej pracy.
Dekorelacja – transformacja dowolnego wektora losowego do postaci wektora o nieskorelowanych współrzędnych
Oryginalne zmienne stanu konstrukcji zebrane w wektor $\mathbf{X}$ są skorelowane. Korelacja ta może mieć charakter statystyczny, wynikający z danych doświadczalnych i analiz statystycznych, lub funkcjonalny, np. w przypadku niezawodnościowych układów mieszanych, szeregowo–równoległych. Zadanie niezawodnościowe ulega istotnemu uproszczeniu po sprowadzeniu go do analizy układu zmiennych losowo niezależnych.
Omówione wcześniej przekształcenie normalizacji $\mathbf{X}\rightarrow\mathbf{Z}^0$ eliminuje jednostki, skale i przesunięcia, lecz nie eliminuje korelacji pomiędzy składowymi wektora. Dopiero dekorelacja $\mathbf{Z}^0\rightarrow\mathbf{U}$ eliminuje liniowe sprzężenie składowych wektora i powoduje, że zadanie niezawodnościowe redukuje się do analizy układu zmiennych losowo niezależnych zestawionych w wektorze $\mathbf{U}$, co prowadzi do znacznego uproszczenia procedur obliczeniowych oraz interpretacji uzyskiwanych wyników.
Kanoniczna reprezentacja wektora losowego (Pugaczew)
Zadanie dekorelacji można przeprowadzić poprzez rozwiązanie problemu własnego macierzy korelacji, co jednak wiąże się z koniecznością wykonania dużej liczby elementarnych przekształceń ortogonalnych. Jeżeli odstąpi się od wymagania ortogonalności (standaryzacji) macierzy transformacji, to dekorelację można wykonać dużo mniejszym kosztem obliczeniowym i to nieskończenie wielu przekształceń liniowych. Efektywne przekształcenie nazywane rozkładem kanonicznym przedstawił Pugachev (1979) [42]).
Jeśli wycentrowany wektor losowy $\mathbf{Z}^0$ ma macierz kowariancji $\mathbf{C}{zz}=\mathrm{Cov}(\mathbf{Z}^0)$, to wystrczy znaleźć macierz przekształcenia $\mathbf{A}$ dla której zachodzi:
\begin{equation} \mathbf{C}_{zz} = \mathbf{A}\,\mathbf{C}_{uu}\,\mathbf{A}^T \tag{IIa.13}\label{IIa.13} \end{equation}
gdzie $\mathbf{C}{uu}=\mathrm{diag}(d_1,\ldots,d_n)$.
Odpowiada to liniowemu przekształceniu zmiennych losowych
\begin{equation} \mathbf{Z^0} = \mathbf{A}\,\mathbf{U}\tag{IIa.14}\label{IIa.14} \end{equation}
gdzie $\mathbf{Z}^0$ – jest wektorem wycentrowanym (standaryzowanym).
W wyniku tej transformacji współrzędne wektora $\mathbf{U}$ są wzajemnie nieskorelowane, a macierz kowariancji $\mathbf{C}_{uu}$ ma postać diagonalną.
Algorytm kanoniczny Pugaczewa do wyznczenia macierz kowariancji $\mathbf{C}_{uu}= diag [k_i ]_{(n×n)}$, wektora $\mathbf{U}$ oraz macierz przekształcenia $\mathbf{A} = [a_{ij} ]_{(n×n)}$ można zapisać w następujacy sposób
\begin{equation} d_k = c_{kk} – \sum \limits _{i=1}^{i=k-1} d_i | a_{ik}|^2 , \quad (k=1,\cdots , n) \tag{IIa.15}\label{IIa.15}\end{equation}
\begin{equation} a_{kj} =\begin {cases}
0 ,& \text {dla } (j=1, \cdots , k-1) \\
1 ,& \text {dla } (j=k) \\
\cfrac{1}{d_k} \left ( c_{jk} – \sum \limits _{i=1}^{i=k-1} d_j \cdot a_{ij} \cdot \overline a_{ik} \right), & \text {dla } (j=k+1, \cdots, n) \\
\end {cases} \tag{IIa.16}\label{IIa.16} \end{equation}
Dla k=1 należy przyjąć: $d_1 = c_{13}$, $a_{1j} =\cfrac{c_{j1}}{d_1}$.
Jeżeli w trakcie obliczeń wystąpi $d_k=0$, to przyjmuje się $a_{kj}=0$ dla $j=1,\ldots,n$, co oznacza brak dalszej informacji niezależnej w danym kierunku.
Rozkład kanoniczny w sensie Pugaczewa nie stanowi nowego odkrycia matematycznego w zakresie faktoryzacji macierzy symetrycznych, gdyż jego struktura odpowiada znanym wcześniej rozkładom typu $\mathbf{LDL}^T$. Oryginalność ujęcia Pugaczewa polega jednak na probabilistycznej interpretacji algorytmu, w szczególności na powiązaniu zaniku wyrazów diagonalnych $d_k$ z utratą niezależnej informacji losowej oraz na zastosowaniu tej reprezentacji do analizy wektorów losowych w zagadnieniach inżynierskich i dynamicznych.
Dekompozycja Cholesky
W teorii niezawodności nie stosuje się ogólnego algorytmu ($\ref{IIa.15}$) – ($\ref{IIa.16}$), lecz jego szczególny przypadek – metodę pierwiastka kwadratowego Cholesky’ego sformułowaną w roku 1910 i publikowaną pośmiertnie [43], w której macierz kowariancji spełnia zależność
\begin{equation} \mathbf{C}_{zz}=\mathbf{L}\mathbf{L}^T\tag{IIa.17}\label{IIa.17} \end{equation}
gdzie $\mathbf{L}$ jest dolnotrójkątną macierzą Cholesky’ego.
W sensie tej dekompozycji zachodzi relacja
\begin{equation} \mathbf{Z}^0=\mathbf{L}\mathbf{U}\tag{IIa.18}\label{IIa.18} \end{equation}
Algorytm numeryczny dekompozycji Cholesky’ego, analogiczny w formie do algorytmu kanonicznego, można zapisać następująco:
Dla $k=1,\ldots,n$ wyznacza się elementy macierzy $\mathbf{L}=[l_{ij}]$ z zależności
\begin{equation} l_{kk}=\sqrt {c_{kk}-\sum_{i=1}^{k-1} l_{ki}^2} \tag{IIa.19}\label{IIa.19} \end{equation}
\begin{equation} l_{jk} = \begin{cases}
\cfrac{1}{l_{kk}}\left(c_{jk}-\sum_{i=1}^{k-1} l_{ji}l_{ki}\right), & \text{ dla } j=k+1,\ldots,n $\\
0 , & \text { dla }j< k\\
\end{cases} \tag{IIa.20}\label{IIa.20} \end{equation}
gdzie $c_{jk}$ są elementami macierzy kowariancji $\mathbf{C}_{zz}$.
Jeżeli w trakcie obliczeń wystąpi $l_{kk}=0$, dalsza dekompozycja nie jest możliwa, co oznacza, że macierz kowariancji nie jest dodatnio określona. Dekompozycja Cholesky’ego istnieje wyłącznie dla macierzy symetrycznych dodatnio określonych.
W sensie dekompozycji Cholesky zachodzi relacja
\begin{equation} \mathbf{Z}^0 =\mathbf{L}\mathbf{U} \tag{IIa.21}\label{IIa.21} \end{equation}
Metoda Pugaczewa a Cholesky’ego
Z porównania (53) i (57) wynika identyfikacja macierzy transformacji
\begin{equation} \mathbf{A}=\mathbf{L} \quad \text {oraz } \quad \mathbf{U}=\mathbf{A}^{-1}\mathbf{Z}^0=\mathbf{L}^{-1}\mathbf{Z}^0\tag{IIa.22}\label{IIa.22} \end{equation}
Rozkład kanoniczny w sensie Pugaczewa oraz dekompozycja Cholesky’ego są ze sobą ściśle powiązane. Jeżeli w rozkładzie kanonicznym macierzy kowariancji zachodzi zależność $\mathbf{C}{zz}=\mathbf{A}\mathbf{D}\mathbf{A}^T$, gdzie $\mathbf{D}=\mathrm{diag}(d_k)$ jest diagonalną macierzą wariancji niezależnych składowych, to po wprowadzeniu macierzy
$\mathbf{L}=\mathbf{A}\mathbf{D}^{1/2}$, otrzymuje się klasyczną dekompozycję Cholesky’ego w postaci $ \mathbf{C}{zz}=\mathbf{L}\mathbf{L}^T$.
Dekompozycja Cholesky’ego jest szczególnym przypadkiem rozkładu kanonicznego, w którym wariancje niezależnych składowych losowych zostały wchłonięte w strukturę dolnotrójkątnej macierzy transformacji.
Rozkład kanoniczny Pugaczewa oraz dekompozycja Cholesky’ego prowadzą do tego samego celu formalnego, tj. sprowadzenia skorelowanego wektora losowego do postaci wektora o nieskorelowanych współrzędnych, jednak różnią się istotnie pod względem algorytmu numerycznego, stabilności oraz możliwości interpretacyjnych. Dekompozycja Cholesky’ego stanowi szczególny przypadek rozkładu kanonicznego, wyspecjalizowany do macierzy symetrycznych i dodatnio określonych. Jej podstawową zaletą jest bardzo wysoka stabilność numeryczna oraz efektywność obliczeniowa, co czyni ją szczególnie użyteczną w analizach wymagających wielokrotnego powtarzania transformacji.
Metoda kanoniczna Pugaczewa umożliwia dekorelację dowolnej dodatnio półokreślonej macierzy kowariancji, bez narzucania struktury trójkątnej i bez wymogu dodatniej określoności na każdym etapie obliczeń. Dzięki temu metoda ta ujawnia zanik informacji losowej w poszczególnych kierunkach przestrzeni stanu (przypadki $d_k=0$), co ma istotne znaczenie interpretacyjne. Jej wadą jest natomiast mniejsza stabilność numeryczna oraz wyższy koszt obliczeniowy dla układów o dużym wymiarze.
Z punktu widzenia modelu dynamicznego obie metody mają wyraźnie odmienne, komplementarne zalety. Metoda Pugaczewa pozwala interpretować redukcję wymiaru losowego jako efekt degradacji, starzenia lub deterministycznego wiązania zmiennych w czasie. Metoda Cholesky’ego jest natomiast bardziej wydajna w analizach sekwencyjnych i czasowych, gdzie struktura dolnotrójkątna macierzy $\mathbf{L}$ odpowiada krokowej naturze propagacji niepewności w czasie.
Obie metody znajdują zastosowanie w analizie modelu dynamicznego w zależności od skali problemu i celu analizy, przy czym metoda Pugaczewa dostarcza bogatszej informacji strukturalnej o ewolucji losowości systemu.
Wektor stanu U w przestrzeni niezależnej Gaussa
Przejście z przestrzeni zmiennych standaryzowanych $\mathbf{Z}^0$ do przestrzeni niezależnej Gaussa $\mathbf{U}$ realizuje się zatem za pomocą transformacji
$$ \begin {equation} \mathbf{U} = \mathbf{L}^{-1} \mathbf{Z}^0 \tag{IIa.23}\label{IIa.23} \end{equation}
Transformacja ta eliminuje korelacje i prowadzi do przestrzeni, w której elipsoidy gęstości prawdopodobieństwa przechodzą w hipersfery. Przestrzeń ta stanowi podstawę geometrycznej definicji punktu najbardziej prawdopodobnego oraz współczynnika niezawodności $\beta=|\mathbf{U}^*|$, a także jego uogólnień, w tym $\tilde{\beta}$, rozumianych jako pierwotne, geometryczne miary niezawodności.
Metody probabilistyczne drugiego poziomu
Metody probabilistyczne drugiego poziomu posługują się aproksymacją powierzchni granicznej $g(\mathbf{X})$ ($\ref{I.8}$) przez rozwinięćie w szereg Taylora w otoczeniu punktu NPP (rys. 1), zwanego też punktem obliczeniowym $\mathbf{X}^*$, W zależności od liczby zachowanych tego wyrazów rozwinięcia następuje dalsza klasyfikacja metod drugiego poziomu na rzędy:
- rząd 1-szy w metodzie FORM – zachowany jest tylko liniowy człon (z wrażliwościami pierwszego rzędu$\nabla$ . Metoda jest często nazywana linearyzacją powierzchni granicznej,
- rząd 2-gi w metodzie SORM – zachowany jest człon drugiego rzędu (z wrażliwościami drugiego rzędu $\nabla^2$. Metoda jest często nazywana parabolizacją powierzchni granicznej.
Metody i aproksymacje przedstawione na rys.5 opierają się na geometrycznej definicji indeksu niezawodności Hasofera–Linda (1974) [44] oraz Rackwitz, Fiessler (1978) [45] .

Rys.5 Klasyczne metody drugiego poziomu wyznaczania niezawodności konstrukcji
Klasyczna metoda FORM z trannsformacja Z Hessego została opracowana przez: Breitung (1984) [46], Tvedt (1983) [47], Hohenbichler, Rackwitz (1988) [48], Köylüoğlu, Nielsen (1994) [49] Cai, Elishakoff (1994) [50].
Rozwiniecia probabilistyczne i transformacje opracowali: Der Kiureghian (1989) [51], Bucher, Bourgund (1990) [52].
Metody krzywizn głównych opracowali: Zhao, Ono (1999) [53], Ang, Ma (1981) [54].. Podejścia spektralne / bez jawnej transformacji Z opracowali: Mansour, Olsson (1991) [55], Park, Ang (1991) [56], Melchers (1999) [57], Ditlevsen, Madsen (1996) [58].
SOSPA jest wymieniona jako nurt, nie osoba.
Metoda niezawodności pierwszego rzędu (FORM)
Najprostszą metodą zaliczaną do metod probbilistycznych 2. poziomu jest metoda niezawodności pierwszego rzędu FORM, której nazwa jest skrótem od First Order Reliability Method, w której w konsekwencji linearyzacji powierzchni granicznej, do analizy wystarczy znajomość tylko dwóch pierwszych momentów statystycznych wektora stanu $\mathbf{X}$: wartości oczekiwanych $\mu_{\mathbf{X}}$ oraz wariancji lub odchylenia standardowego $\sigma_{\mathbf{X}}$.
Metodę FORM stosuje się najczęściej w odmianach:
HL (Hasofer -Lind) – klasyczny algorytm FORM, najprostsza implementacja,
RF (Rackwitz-Fiessler) – najlepsza przy silnie nienormalnych zmiennych (log-normalne, Gamma itp.).
HLRF (Hasofer-Lind-Rackwitz-Fiessler) – połączenie metod HL i RF,
iHLRF (improved HLRF) – stabilizacja zbieżności (np. „line-search”),
TFORM (Tvedt’s FORM) – ulepszone przez odwzorowanie krzywizny g(X),
CDFORM (Conjugate-Direction FORM)- ulepszona zbieżność przy „płaskich” funkcjach stanu
Metodę RF stosuje się dla konstrukcji z obciążeniami zmiennymi, w normie PN- EN 1990. Metoda HL/HLEF do ogólnych analiz konstrukcyjnych. Jest najczęściej stosowana w praktyce inżynierskiej (obok RF)i jest standardem w podręcznikach i programach inżynierskich. Metoda iHLRF stosowana jest w modelach silnie nieliniowych. Metoda TFORM jest najczęściej stosowana w połączeniu z SORM. Metoda CDFORM stosowana jest w analizach FEA.
Niżej krótko omówiono metodę HL/HLRF oraz metodę RF.
Fundamentalna formuła FORM
Podstawowym problemem metody FORM jest znalezienie punktu NPP (Najbardziej prawdopodobnego Punktu) (amg MPP – MOst probbly Point) $\mathbf {X}^*$, który jest położony na powierzchni granicznej i wokół którego następuje rozwinięcia szeregu Taylora ($\ref{I.33}$). W punkcie tym następuje maksymalizacja gęstości prawdopodobieństwa powierzchni stanu granicznego, co prowadzi do najdokładniejszego przybliżenia prawdopodobieństwa zniszczenia.
W metodach FORM i SORM punkt ten odpowiada minimum odległości od początku układu współrzędnych w przestrzeni znormalizowanej i jest wyznaczany w procedurze iteracyjnej zaporponowanej po raz pierwszy przez Hasofer i Lind (1974) [59]. Macierzowe sformułowanie procedury wyznaczenie punktu projektowego NPP podano w pracy Ditlevesen’a (1981) [60], cytującego Veneziano (1974) [61]. W celu wyznaczenia puntu projektowego $ \mathbf {X}^*$ oraz współczynnika niezawodności $\beta$ należy przeprowadzić procedurę optymalizacji, opisaną formułą.
\begin{equation} \beta = \min \limits_{\mathbf{X} \in \Omega_f} \sqrt{ {\mathbf{X}^0}^ T \mathbf{C}_{xx}^{-1} \mathbf{X}^0 } \to \mathbf{X} = \mathbf{X^*} \tag{IIa.24}\label{IIa.24} \end{equation}
gdzie:
$\mathbf{X}^0$ wycentrowany ($\ref{I.24}$) (często nazywany standaryzowanym) wektor reprezentujący zbiór zmiennych losowych stanu $\mathbf{X}$,
$\mathbf{C}_{xx} $ – macierz kowariancji wektora ($\ref{I.27}$) ,
$\Omega_f$ – obszar awarii (stanów niedopuszczalnych, zniszczenie) ($\ref{I.16}$)
$\mathbf{X}*$ punkt obliczeniowy (najbardziej prawdopodobny) NPP (rys.1)
W przypadku gdy zmienne $\mathbf{X}$ są normalne i nieskorelowane, to współczynnik $\beta$ ($\ref{IIa.45}$) jest minimalną odległością między punktem wartości oczekiwanej funkcji gęstości prawdopodobieństwa ( początkiem układu współrzędnych), a powierzchnią stanu granicznego. Normalizacja wektora $\mathbf{X}$ istotnie upraszcza procedury obliczeniowe poszukiwania minimum ($\ref{IIa.45}$).
Przed procedurą optymalizacji ($\ref{IIa.24}$) przeprowadza się: przekształcenie zmiennych pierwotnych $\mathbf{X}$ do tzw. U-space , czyli przestrzeni nieskorelowanych i wycentrowanych zmiennych normalnych $\mathbf {U}$.
Po przeprowadzeniu transformacji do U-space równanie powierzchni granicznej ($\ref{I.20}$) przyjmuje postać
\begin{equation} g_u (\mathbf{U}) = 0\tag{IIa.25}\label{IIa.25} \end{equation}
a warunek ($\ref{IIa.45}$) redukuje się do
\begin{equation} \beta = \min \sqrt{ [ \mathbf{U}^T \mathbf{U}} , \text {przy ograniczeniu } g_u ( \mathbf{U}) =0 \tag{IIa.26}\label{IIa.26} \end{equation}
z którego uzyskuje się punkt NPP $\mathbf{U}^*$,. Odległość NPP od początku układu współrzędnych do powierzchni stanu granicznego jest najmniejsza ze wszystkich punktów leżących na powierzchni granicznej.
W przypadku liniowej (zlinearyzowanej) powierzchni granicznej z podstawowej własności U-space czyli addytywności rozkładu normalnego wynika, że w sposób ścisły również liniowa funkcja stanu granicznego ma rozkład normalny.
Dla powierzchni granicznej zapisanej w formie marginesu bezpieczeństwa ($\ref{I.20}$) $g = M= R – E$, gdzie: R – losowa wytrzymałość o rozkładzie $ \mathcal N ( \mu_R,\sigma_R)$, E – losowe obciążenie,$ \mathcal N ( \mu_E ,\sigma_E) $, zachodzi
\begin{equation} \mathcal N ( \mu_M, \, \sigma_M) = \mathcal N (\mu_R – \mu_E , \, \sqrt{\sigma_R^2 +\sigma_E^2}) \tag{IIa.27}\label{IIa.27} \end{equation}
Praktyczne procedury poszukiwania NPP z zastosowaniem arkusza obliczeniowego
probktyczną procedurę analizy niezawodności dla skorelowanych rozkładów nienormalnych z zastosowaniem powszechnie dostępnych arkuszy obliczeniowych, np Microsoft Excel opisali Low-Tang (1997) [62]. Algorytm możliwy do zaimplementowania w arkuszu kalkulacyjnym wykorzystuje obiektową optymalizację z ograniczeniami. Do wyznaczenia pochodnych numerycznych i iteracyjnego wyszukiwanie punktu projektowego wykorzystuje się standardowe funkcje arkusza.
Narzędzie optymalizacyjne znajduje się w arkuszu Microsoft Excel z dodatkiem Solver ( też: Lotus 123 i Quattro Pro). Dodatek Solver umożliwia optymalizację różnymi metodami, w tym: 1) nieliniową GEG (uogólniony zredukowany gradient) stosowaną w przypadkach, gdy relacje między zmiennymi a komórką celu są „gładkie” (ciągłe i różniczkowalne), 2) prosty algorytm sympleksu (LP simpleks), przeznaczony do liniowych problemów (funkcja celu i wszystkie ograniczenia muszą być liniowymi wyrażeniami), 3) metoda ewolucyjna, dla problemów o charakterze niegładkim, czyli takich, w których relacje między zmiennymi a komórką celu nie są gładkie.
Do optymalizacji problemu $(\ref{IIb.1}$) dla przestrzeni zmiennych normalnych, przy zlinearyzowanej powierzchni granicznej, czyli w metodzie FORM wystarcza metoda LP simpleks. Natomiast w metodzie SORM stosuje się najczęściej metodę CEG, a w trudnych przypadkach metodę ewolucyjną.
Metoda Hasofer-Lind (HL)
Klasyczna definicja indeksu Hasofera–Lind, to wynik rozwiązanie problemu (HL):
\begin{equation} \beta_{HL} = \min \limits_U ||\mathbf{U}|| \text { przy warunku } g(\mathbf{U}) =0 \tag{IIa.28}\label{IIa.28}\end{equation}
gdzie $||\mathbf{U}||$ jest normą wektora $\mathbf{U}$ , czyli jego długością:
\begin{equation} ||\mathbf{U}|| =\sqrt{\sum \limits_{(i=1)}^N u_i^2 } \tag{IIa.30}\label{IIa.29}\end{equation}
$N$ – rozmiar wektora $\mathbf{U}$ z wartościami współrzędnych $u_i$
W przypadku funkcji granicznej wyrażonej w postaci ($\ref{I.20}$) o dwóch zmiennych $U_1$ i $U_2$ formułę ($\ref{IIb.16}$) można sprowadzić do zadania jednowymiarowego. z warunku $g(U_1,\, U2)$ wyznaczamy $U_2$ jako funkcję $U_2 (U_1)$ a sprowadzone do problemu jednowymiarowej zadanie optymalizacji można zapisać następująco:
\begin{equation} \beta= \min \limits_{U_1} || U_1|| \text { przy warunku } g(U_1) =0 \tag{IIa.30}\label{IIa.30}\end{equation}
Zadanie ($\ref{IIb.16}$) można teraz rozwiązać dowolną standardową procedurą optymalizacji matematycznej, np. z wykorzystaniem dodatku Solver do arkusza kalkulacyjnego Excel .
Iteracje prowadzimy do momentu osiągnięcia zbieżności ocenianej z warunku
\begin{equation} ||U||^{(k+1)} – ||U||^{(k)} \le \varepsilon \tag{IIa.31}\label{IIa.31}\end{equation}
Typowe wartości tolerancji, to $\varepsilon = ( 10^{-6}\div 10^{-4}) $ zależnie od wymagań.
Jako początkowe przybliżenie $U^{(0)}$ można przyjąć wektor zerowy $U^{(0)}=(0,0)$.
Po osiągnięciu zbieżności otrzymujemy:
współrzędne punku NPP $\mathbf{U}^*$ ,
indeks niezawodności $\beta = || U ||^* $,
prawdopodobieństwo awarii $ p_f \approx\Phi^{-1}(\beta)$,
Jednostkowy wektor (ang. importance factors) jest wektorem kosinusów kierunkowych, wyznaczającym kierunek normalny do powierzchni granicznej wystawiony w punkcie NPP $\alpha ^* = \alpha (U^*) $ obliczany z formuły
\begin{equation} \alpha ^{(k)} = \cfrac{\nabla g(U)}{||\nabla g(U)||} \tag{IIa.32}\label{IIa.32} \end{equation}
Metoda Rackwitz-Fiessler (RF)
Metoda Rackwitz–Fiessler (RF), jest zapewne najpopularniejszym wariantem metody FORM i jest zalecona w PN-EN 1990 [11].
Punkt NPP wyznacza dominujący kierunek awarii i znajduje się przez rozwiązanie problemu optymalizacyjnego
\begin{equation} \beta= \min \limits_{U=(U_R, U_E)} \cfrac{1}{2} \mathbf{U}^T\mathbf{U} \tag{IIa.33}\label{IIa.33} \end{equation}
\begin{equation} \to \text { minimalizuj } \cfrac{1}{2}\parallel U \parallel^2 \text {przy ograniczeniu } g(U)=0 \tag{IIa.34}\label{IIa.34}\end{equation}
Zadanie rozwiązujemy metodą mnożników Lagrange’a $\lambda$.
Z warunków pierwszego rzędu metody mamy warunek stacjonarności problemu
\begin{equation} U + \lambda \nabla g =0 \tag{IIa.35}\label{IIa.35}\end{equation}
a stąd argument funkcji granicznej zapisany z mnożnikiem Lagrange’a
\begin{equation} U = – \lambda \nabla g =0 \tag{IIa.36}\label{IIa.36}\end{equation}
Klasyczna iteracja R-F (Rakwitz-Fiessler) (1978) [63] (w przestrzeni $U$) ma postać:
\begin{equation} U^{(k+1)} = \cfrac{g(U^{(k)})}{|||\nabla g(U^{(k)}) |} \cdot \alpha (U^{(k)}) \tag{IIa.37}\label{IIa.37}\end{equation}
Kryterium zbieżności ($\ref{IIb.17}$) stosowane jest też w algorytmie RF, a po zakończeniu procesu iteracji otrzymujemy jednocześnie wielkości wymienione w uwadze pod tym kryterium.
Metoda Hasofer-Lind-Rackwitz-Fiessler (HLRF)
Metoda Hasofer-Lind-Rackwitz-Fiessler (HLRF) jest połączeniem idei metod HL i RF i jest probktycznym algorytm iteracyjnym używanym do znalezienia punktu projektowego NPP. W praktyce to właśnie HLRF (tzn. HL + poprawka RF w iteracyjnym schemacie) jest powszechnie używany, bo daje szybkie zbieżne rozwiązanie dla większości problemów FORM
W kroku k-tym iteracji, znając punkt $U^{(k)}$, obliczamy:
gradient wektora $\nabla g(U^{(k)})$ analogicznie do ($\ref{IIa.27}$)
normę gradientu $ ||\nabla g(U^{(k)})||$ analogicznie do ($\ref{IIb.25}$)
jednostkowy kierunek normalny ($\ref{IIb.18}$) $\alpha ^{(k)} = \cfrac{\nabla g(U^{(k)}}{ ||\nabla g(U^{(k)}|| }$
Liczba $\beta$ (indeks niezawodności) iterowana jest podług formuły
\begin{equation} \beta^{(k+1)} = \cfrac{ \nabla g(U^{(k)}) ^T U^{(k)}- g(U^{(k)})}{\nabla g(U^{(k)})} \tag{IIa.38}\label{IIa.38}\end{equation}
Następnie aktualizujemy punkt
\begin{equation} U^{(k+1)} = \beta^{(k+1)} \cdot \alpha ^{(k)} \tag{IIa.39}\label{IIa.39}\end{equation}
i wykonujemy kolejny krok iteracji.
Algorytm jest dobrze opisany , a kod źródłowy podano na przykład na stronie ffpack.readthedocs.io+1.
Powierzchnia graniczna i niezawodność z wieloma mechanizmami zniszczenia – ujęcie FORM
Rys. 6 przedstawia geometryczną interpretację niezawodności konstrukcji w przestrzeni zmiennych niezależnych Gaussa $(U_1,U_2)$ dla układu z wieloma skorelowanymi mechanizmami zniszczenia. Krzywe $g(M_1)=0$, $g(M_2)=0$ oraz $g(M_3)=0$ oznaczają powierzchnie graniczne odpowiadające poszczególnym mechanizmom zniszczenia rozpatrywanym oddzielnie. Obszar $\Omega_{f,sys}$ stanowi zbiór stanów zniszczenia systemu, zdefiniowany jako suma logiczna obszarów zniszczenia poszczególnych mechanizmów, natomiast $\Omega_{r,sys}$ oznacza obszar stanów bezpiecznych.

Rys.6 . Funkcje graniczne dla wielu mechanizmów zniszczenia
Rozpatruje się konstrukcję opisaną przez zbiór $m$ funkcji granicznych $g_{M_i}(\mathbf{X})$, $i=1,\ldots,m$, odpowiadających różnym mechanizmom zniszczenia. Po normalizacji i dekorelacji zmiennych losowych przechodzi się do przestrzeni niezależnej Gaussa $\mathbf{U}$, w której każdemu mechanizmowi odpowiada powierzchnia graniczna $g_{M_i}(\mathbf{U})=0$.
Dla pojedynczego mechanizmu $M_i$ obszar niezawodności ma postać $\Omega_{r,i}={\mathbf{U}: g_{M_i}(\mathbf{U})>0}$, natomiast obszar zniszczenia $\Omega_{f,i}={\mathbf{U}: g_{M_i}(\mathbf{U})\le 0}$. W przypadku wielu mechanizmów zniszczenia układ ma charakter systemowy. Obszar zniszczenia systemu jest sumą zbiorów zniszczenia poszczególnych mechanizmów $\Omega_{f,\mathrm{sys}}=\bigcup \limits_{i=1}^{m}\Omega_{f,i}$, natomiast obszar niezawodności jest ich częścią wspólną $\Omega_{r,\mathrm{sys}}=\bigcap \limits_{i=1}^{m}\Omega_{r,i}$.
Granica systemowa w przestrzeni $\mathbf{U}$ ma więc postać obwiedni powierzchni granicznych poszczególnych mechanizmów i może być zapisana w sposób zwarty jako $g_{\mathrm{sys}}(\mathbf{U})=\min_{i} g_{M_i}(\mathbf{U})=0$.
Współczynnik niezawodności systemu definiuje się geometrycznie jako minimalną odległość od początku układu współrzędnych do granicy systemowej
\begin{equation} \beta_{\mathrm{sys}}=\min_{\mathbf{U}\in\Omega_{f, sys}}| |\mathbf{U}|| \tag{IIa.40}\label{IIa.40}\end{equation}
Punkt $\mathbf{U}^{}{\mathrm{sys}}$ realizujący to minimum jest punktem najbardziej prawdopodobnego zniszczenia (NPP) systemu i spełnia warunki Karusha–Kuhna–Tuckera. W szczególności istnieje zbiór mechanizmów aktywnych $A\subset{1,\ldots,m}$ taki, że:
$g{M_i}(\mathbf{U}^{}{\mathrm{sys}})=0$ dla $i\in A$,
$g{M_j}(\mathbf{U}^{*}_{\mathrm{sys}})>0$ dla $j\notin A$.
Jeżeli zbiór aktywny zawiera tylko jeden mechanizm, $A={k}$, wówczas punkt systemowy pokrywa się z punktem najbardziej prawdopodobnym tego mechanizmu, a współczynnik niezawodności systemu jest równy $\beta_{\mathrm{sys}}=\beta_{M_k}$.
W tym sensie dla mechanizmów niezależnych lub słabo skorelowanych otrzymuje się klasyczną zależność: niezawodność systemu, to minimum niezawodności mechanizmów zniszczenia:
\begin{equation} \beta_{sys}= \min \limits_i \beta_{M_i} \tag{IIa.41}\label{IIa.41}\end{equation}
co odpowiada sytuacji, w której granica systemowa jest zdominowana przez jeden mechanizm krytyczny.
Odcinki wspólne granicy systemowej – mechanizmy skorelowane
Jeżeli co najmniej dwa mechanizmy są jednocześnie aktywne, tzn. $|A|\ge 2$, punkt systemowy leży na części wspólnej powierzchni granicznych. Dla dwóch mechanizmów $M_i$ i $M_j$ fragment wspólny granicy systemowej można zapisać jako zbiór
$\Gamma_{ij}={\mathbf{U}: g_{M_i}(\mathbf{U})=0,; g_{M_j}(\mathbf{U})=0,; g_{M_k}(\mathbf{U})>0\ \forall k\neq i,j}$.
Granica systemowa ma wówczas strukturę złożoną i może być zapisana jako suma rozłącznych fragmentów
$\partial\Omega_{f,\mathrm{sys}}=\bigcup_i \Gamma_i\ \bigcup\ \bigcup_{i<j}\Gamma_{ij}\ \bigcup\ \bigcup_{i<j<k}\Gamma_{ijk}\ \bigcup\ \ldots$,
gdzie $\Gamma_i$ odpowiada fragmentowi aktywowanemu przez pojedynczy mechanizm, a $\Gamma_{ij}$, $\Gamma_{ijk}$ – fragmentom wspólnym kilku mechanizmów.
Jeżeli punkt najbardziej prawdopodobny zniszczenia leży na fragmencie wspólnym dwóch mechanizmów, współczynnik niezawodności systemu wynika z rozwiązania zadania minimalizacyjnego
\begin{equation} \beta_{sys}= \min \limits_{\mathbf{U}}|| \mathbf{U}|| \tag{IIa.42}\label{IIa.42}\end{equation}
przy ograniczeniach: $g_{M_i}(\mathbf{U})=0$, $g_{M_j}(\mathbf{U})=0$.
W tym przypadku nie obowiązuje prosta reguła minimum z pojedynczych współczynników $\beta_{M_i}$. Wartość $\beta_{sys}$ jest większa od $\min[ \beta_{M_i}, \, \beta_{M_j}] $, lecz mniejsza od obu współczynników liczonych niezależnie, a jej wartość zależy od geometrii przecięcia powierzchni granicznych, czyli w praktyce od korelacji pomiędzy mechanizmami.
Ujęcie geometryczne FORM pozwala jawnie wskazać, który mechanizm lub które ich kombinacje są aktywne w punkcie systemowym. Jest to informacja niedostępna w podejściach czysto probabilistycznych typu „min $p_f$” lub w prostych modelach binarnych.
W przykładzie 8 mechanizmy nośności i użytkowalności nie są niezależne, ponieważ korzystają ze wspólnych zmiennych losowych ($L$, $G$, $S$, częściowo $I$ i $W$). Skorelowanie mechanizmów powoduje, że granica systemowa nie jest prostą obwiednią dwóch niezależnych punktów NPP, lecz posiada fragment wspólny, na którym realizuje się punkt systemowy.
Takie sformułowanie problemu stanowi bezpośrednie przygotowanie do modelu dynamicznego niezawodności. W ujęciu dynamicznym zmienia się w czasie położenie i kształt powierzchni granicznych $g_{M_i}(\mathbf{U},t)=0$, a zanik lub pojawianie się fragmentów wspólnych granicy systemowej odpowiada fizycznym procesom degradacji, starzenia lub zmian schematu pracy konstrukcji. Jawne uwzględnienie korelacji pomiędzy mechanizmami już na poziomie FORM dostarcza inżynierowi informacji o rzeczywistej strukturze zagrożenia i pozwala na algorytmiczne, a nie heurystyczne, przejście do dalszej analizy dynamicznej.
Metoda niezawodności drugiego rzędu (SORM)
W niniejszym artykule nie przedstawiamy szczegółów metody SORM, bowiem większość praktycznych problemów w teorii konstrukcji budowlanych jest wielowymiarowa i stosowanie SORM traci sens szczególnie w sytuacji mało precyzyjnego szacowania parametrów zmiennych stanu, najczęściej o dokładności dużo mniejszej od zysków wynikających z lepszej aproksymacji powierzchni granicznej wokół punktu obliczeniowego. W większości praktycznych problemów inżynierskich wystarczająca jest metoda FORM. Dużo ważniejsze dla praktyki jest jest uwzględnienie procesów degradacji konstrukcji w czasie, co umożliwia niezawodnościowy model dynamiczny konstrukcji budoelanej omówiony w części III pracy,
Metoda SORM została wyczerpująco omówiona w pracy Hu i in.(2021) [64]. W tej pracy pokazano, że metody SORM są bardziej wydajne niż symulacje MC, dla niewielkiej liczby zmiennych losowych (do ok kilkudziesięciu), ale przy zwiększaniu się wymiaru wektora stanu do rozmiarów spotykanych w praktyce m, czyli do tysięcy:
(1) nakład obliczeniowy związany z obliczaniem gradientów różnic skończonych podczas poszukiwania MPP rośnie liniowo wraz z liczbą zmiennych losowych;
(2) konieczna jest duża liczba iteracji w celu uzyskania zbieżności do NPP;
(3) zbieżność do rozwiązania globalnego przy użyciu konwencjonalnych algorytmów optymalizacji NPP staje się coraz mniej prawdopodobna wraz ze wzrostem wymiaru, ze względu na potencjalną obecność lokalnych minimów.
Metoda powierzcjni odpowiedzi oraz oraz Monte Carlo
Metoda powierzchni odpowiedzi (RSM)
W praktyce inżynierskiej klasyczne metody aproksymacyjne, oparte na lokalnej linearyzacji funkcji stanu granicznego, mimo swojej elegancji matematyczno-numerycznej, często zawodzą przy rzeczywistych, silnie nieliniowych modelach numerycznych konstrukcji. Metoda powierzchni odpowiedzi (Response Surface Method, RSM) umożliwia bezpośrednie wykorzystanie wyników analiz MES i stanowi obecnie podstawowe narzędzie obliczeniowe w probabilistycznej ocenie bezpieczeństwa konstrukcji.
W praktyce RSM daje wyniki znacznie bliższe rzeczywistości, ponieważ:
- operuje na modelu rzeczywistym, podczas gdy metody lokalne pracują na modelach idealizowanych,
- nie wymaga analitycznej postaci funkcji granicznej g(.), lecz pracuje bezpośrednio na wynikach MES i symulacji nieliniowych,
- nie narzuca z góry struktury geometrycznej powierzchni granicznej ani jej lokalnej liniowości,
- respektuje fakt, że „prawdziwa” funkcja graniczna nie istnieje – istnieje jedynie solver numeryczny,
- dostarcza działający metamodel odpowiedzi konstrukcji, zamiast pojedynczego wskaźnika,
- umożliwia analizy wrażliwości, scenariusze awaryjne oraz szybkie przeliczenia wariantów projektowych bez ponownego uruchamiania MES,
- pozwala na bieżącą kontrolę procesu obliczeniowego przez inżyniera, w tym identyfikację błędów fizycznych i numerycznych.
W praktyce RSM daje wyniki znacznie bliższe rzeczywistości niż FORM, ponieważ:
- operuje na modelu rzeczywistym, podczas gdy FORM pracuje na modelu idealizowanym,
- nie wymaga analitycznej postaci funkcji granicznej g(.), pracuje bezpośrednio na wynikach MES i symulacji nieliniowych
- nie narzuca z góry struktury geometrycznej powierzchni granicznej, podczas gdy FORM wymaga jej gładkości, jednoznaczności oraz lokalnej liniowości w punkcie projektowym,
- respektuje fakt, że „prawdziwa” funkcja graniczna g(.) nie istnieje – istnieje jedynie solver numeryczny; FORM przyjmuje istnienie g(.) jako pewnik,
- dostarcza działający metamodel odpowiedzi konstrukcji, podczas gdy FORM kończy się na pojedynczej liczbie β, bez informacji o zachowaniu układu poza punktem krytycznym i bez możliwości analiz typu „co-jeśli”,
- umożliwia analizy wrażliwości, scenariusze awaryjne oraz szybkie przeliczenia wariantów projektowych bez ponownego uruchamiania MES,
- pozwala na bieżącą kontrolę procesu obliczeniowego przez inżyniera, w tym identyfikację błędów fizycznych i numerycznych.
Metody lokalne nie posiadają wbudowanego mechanizmu kontroli błędu i na każdym etapie mogą prowadzić do istotnych zniekształceń wyniku: od niedopuszczalnej lokalnej aproksymacji liniowej, poprzez błędną identyfikację punktu krytycznego, aż po znaczne przeszacowanie bezpieczeństwa. RSM może być natomiast adaptacyjnie ulepszana (zagęszczanie punktów, ponowne dopasowanie metamodelu), dzięki czemu jest metodą efektu obliczeniowego, a nie abstrakcyjnej idei.
W konsekwencji RSM czyni metody lokalne zbędnymi w analizach, w których niezawodność obliczana jest metodą Monte Carlo na metamodelu, a celem analizy jest rzeczywiste prawdopodobieństwo awarii $p_f$, a nie geometryczna interpretacja wskaźnika $\beta$.
Początki metody powierzchni odpowiedzi sięgają lat 50. XX wieku, kiedy Box i Wilson (1951) zaproponowali ją jako narzędzie planowania eksperymentów w chemii i przemyśle
[65]. Jej pierwotnym celem było budowanie przybliżonych modeli funkcyjnych na podstawie ograniczonej liczby danych eksperymentalnych w celu minimalizacji kosztownych testów laboratoryjnych.
W latach 70. i 80. RSM znalazła szerokie zastosowanie w optymalizacji procesów produkcyjnych, mechanice i materiałoznawstwie oraz w zagadnieniach numerycznych, w których funkcja odpowiedzi jest wynikiem złożonej symulacji komputerowej.
Od lat 90. metoda RSM stała się powszechnym narzędziem w analizie niezawodności konstrukcji, ponieważ pełna analiza probabilistyczna jest obliczeniowo kosztowna, a analizy MES są iteracyjne i czasochłonne. Itotny wkład w adaptację idei metamodelowania do niezawodności konstrukcji wnieśli m.in. Harr (1967, 1977, 1984) [66], [67], [68], Baker (1975. 1982) [69], [70], oraz Rosenblueth (1986) [71].
RSM umożliwia budowę modelu zastępczego (metamodelu), który znacząco redukuje koszt obliczeń. Obecnie RSM jest standardowym narzędziem w ocenie ryzyka uszkodzeń konstrukcji, analizach wrażliwości oraz probabilistycznej kalibracji norm projektowych. Nie tyle zastąpiła klasyczne metody niezawodności, ile stała się warstwą pośrednią pomiędzy kosztownym modelem fizycznym a metodami probabilistycznymi. Redukcja kosztów obliczeń rzędu 100–1000 razy jest w praktyce inżynierskiej typowa.
Powierzchnia odpowiedzi jest modelem zastępczym funkcji stanu granicznego $g(\mathbf{X})=0$, przy czym zamiast wykonywać dużą liczbę kosztownych analiz numerycznych buduje się aproksymację:
\begin{equation} g(\mathbf{X} \approx \hat{g} (\mathbf{X}) \tag{IIa.43}\label{IIa.43} \end{equation},
Na wstępie redukuje się liczbę zmiennych losowych do zmiennych istotnych, następnie projektuje się eksperyment numeryczny, czyli reprezentatywny zestaw punktów próbkowania. W wybranych punktach oblicza się rzeczywistą wartość funkcji $g(\mathbf{X})$ (MES, analizy nieliniowe, symulacje dynamiczne). Na tej podstawie konstruuje się powierzchnię odpowiedzi, zwykle w postaci wielomianów drugiego lub trzeciego stopnia, powierzchni sklejanych, modeli krigingowych lub metamodeli opartych na sieciach neuronowych.
Na tak skonstruowanej powierzchni oblicza się niezawodność konstrukcji $p_f$ lub $\beta$, stosując szybką symulację Monte Carlo; metody lokalne pełnią w tym procesie rolę pomocniczą.
Metoda symulacji Monte Carlo (MC)
Z przeprowadzonych analiz wynika, że metody aproksymacyjne należy traktować jako metody przejściowe, o znaczeniu głównie historycznym. Metodą docelową jest metoda Monte Carlo, w szczególności w wersjach szybkich i adaptacyjnych.
Klasyczna metoda Monte Carlo jest metodą uniwersalną, zdolną do rozwiązywania złożonych, dowolnie nieliniowych i sprzężonych zagadnień techniki, co zostało szczegółowo opisane w pracach Jermakowa (1976)[72] , oraz Kopocińskiego (1977) [73].
Przy założeniu niezależności poszczególnych realizacji estymator prawdopodobieństwa awarii $p_f$ ma postać
\begin{equation} P_f = \cfrac{n_f}{N}\tag{IIa.44}\label{IIa.44} \end{equation}
gdzie $n_f$- jest liczbą realizacji spośród wszystkich N dla których system „wyskoczył” z obszaru dopuszczalnego w dowolnym miejscu (elemencie) i dla dowolnego kryterium jakości.
Dokładność MC zależy przede wszystkim od liczby losowań oraz jakości generatora liczb pseudolosowych. W przypadku małych prawdopodobieństw awarii, znamiennych dla konstrukcji budowlanych, klasyczna MC staje się jednak obliczeniowo nieefektywna[74] i in..
W celu otrzymania oszacowania $p_f$ ze względnym błędem średniokwadratowym $\delta=\cfrac{\sigma_{p_f}}{p_f}$ należy przeprowadzić nie mniej realizacji niż wynika to z formuły:
\begin{equation} N = \cfrac{1-p_f}{p_f \cdot \delta^2}\tag{IIa.45}\label{IIa.45} \end{equation}
Przykładowo dla pf= 10-4 (wymaganego dla konstrukcji budowlanych rzędu prawdopodobieństwa zniszczenia) i dla błędu oszacowania 10% mamy N=106.
Nawet milion losowań daje oszacowanie aż z 10% błędem, podczas gdy w konstrukcjach budowlanych przyjmuje się, że zmiany rozwiązań projektowych należy prowadzić tak długo, aż różnica rozwiązań mechaniki pomiędzy rozwiązaniem wcześniejszym, a poprawionym nie będzie większa of 2%, co prowadził do wymagania 25 milionów losowań.
Przeprowadzenie tak dużej liczby symulacji byłoby bardzo kosztowne i długotrwałe. Dlatego w analizie niezawodności konstrukcji budowlanych, a szczególnie systemów DSK ważne są szybkie metody MC, pozwalające zmniejszyć wymaganą liczbę symulacji nawet o kilka rzędów.
Szybka Metoda Monte Carlo (SMC)
W analizie niezawodności konstrukcji budowlanych, a szczególnie dużych systemów konstrukcyjnych (DSM), ważną rolę odgrywają szybkie metody Monte Carlo, rozwijane m.in. przez , McKaya i in. (1979) [75], Grigoriu (2012) [76], Becka i współpracowników [77], O;Hadana (1006) [78],
Szybka metoda Monte Carlo stanowi odmianę klasycznej metody MC i polega na zwiększeniu jej efektywności obliczeniowej poprzez wykorzystanie dodatkowych informacji o równaniu systemu (powierzchni granicznej) oraz o mierze, względem której wykonywana jest operacja całkowania (najczęściej funkcji gęstości prawdopodobieństwa) [79].
Do przyśpieszenia symulacji MC stosuje się:
- metodę funkcji ważności (importance sampling), polegającą na redukcji wariancji estymatora poprzez odpowiedni dobór gęstości losującej [80]. Metoda ta jest w istocie klasyczną metodą zmiennej kontrolnej w ujęciu ilorazowym. W przypadku idealnym, gdy wybrana gęstość losująca g(x) byłaby proporcjonalna do gęstości oryginalnej f(x), wariancja estymatora redukowałaby się do zera i wystarczyłoby jedno losowanie, aby uzyskać wynik dokładny. W praktyce redukcja liczby losowań w stosunku do klasycznej metody MC wynosi zwykle kilka rzędów wielkości. Przy zastosowaniu normalnej gęstości losującej oszacowanie prawdopodobieństwa awarii nie jest bardzo wrażliwe na kształt obszaru awarii [79].
- metody adaptacyjne, stosowane w przypadkach, gdy powierzchnia graniczna posiada wiele punktów projektowych (lokalnych minimów), co występuje m.in. przy wielu mechanizmach zniszczenia, ujemnych krzywiznach powierzchni granicznych, punktach osobliwych oraz w konstrukcjach wrażliwych na utratę stateczności lub imperfekcje. W metodach tych gęstość losująca jest sukcesywnie modyfikowana i udoskonalana w trakcie generowania kolejnych realizacji zmiennych losowych.
- metody łacińskich hiperkostek (ang . Latin Hypercube Sampling (LHS)), będącą statystyczną metodą generowania próbek z wielowymiarowego rozkładu prawdopodobieństwa (McKay 1979) [81]
Rząd wielkości liczby kombinacji ortogonalnych dla łacińskiej hiperkostki złożonej z podziałów przy zmiennych (czyli wymiarów) można obliczyć ze wzoru:
\begin{equation} \left (\prod \limits_{n=0}^{M-1} (M-N) \right) = (M )^{N-1} \tag{IIa.46}\label{IIa.46} \end{equation}
gdzie: M – liczba podziałów N-liczba zmiennych (N=2 – płaszczyzna, N=3 – przestrzeń). Przykładowo dla M=4, N=2 mamy 24 możliwych kombinacji; dla M=4, N=3 mamy 676 możliwych kombinacji(losowań). Dla uzyskania takiej samej dokładności w klasycznej metodzie MC zwykle potrzeba byłoby kilkaset razy więcej losowań,
- algorytmy genetyczne stosowane w połączeniu z metodą łacińskich hiperkostek, służące do generowania kolejnych hiperkostek w procesie optymalizacji próbkowania [82].
- rozwinięcia Neumanna, stosowane do aproksymacji powierzchni granicznej zamiast klasycznego rozwinięcia Taylora [83], [84], [85],
- podejście bayesowskie, różniące się fundamentalnie od klasycznego, częstotliwościowego ujęcia Monte Carlo. W podejściu tym losowość wyników jest w dużej mierze konsekwencją braku wiedzy o modelu przetwarzającym zmienne wejściowe, a nie wyłącznie ich rozrzutu. Zwiększanie liczby symulacji nie musi prowadzić do poprawy estymacji prawdopodobieństwa zdarzenia. Wnioskowanie bayesowskie wykorzystuje informacje aprioryczne w kolejnych losowaniach [86].
Ponadto stosuje się: metodę zmiennej kontrolnej, metody średniej ważonej, losowanie warstwowe, obniżenie krotności całki oraz stochastyczne formuły kwadraturowe [87]
Najbardziej efektywne przyśpieszenie MC uzyskuje się poprzez stosowanie kombinacji wyżej wymienionych metod, dobieranych do każdego zagadnienia przez inżyniera.
Przewaga Szybkich Metod Monte Carlo SMC nad FORM/SORM
Szybkie metody Monte Carlo opierają się na redukcji wariancji poprzez odpowiedni dobór próby. Ich przewaga nad metodami FORM/SORM polega na tym, że:
- redukcja wariancji stanowi istotę metody, a nie dodatek algorytmiczny,
- importance sampling ma charakter metody fundamentalnej, a nie pomocniczej,
- adaptacyjność umożliwia analizę procesów wielomodalnych i wielomechanizmowych,
- metody SMC zachowują skuteczność w obecności wielu punktów projektowych, ujemnej krzywizny powierzchni granicznej, bifurkacji oraz utraty stateczności, w przypadkach, w których FORM ulega załamaniu.
Istotną cechą metod szybkich symulacji jest możliwość bieżącej oceny jakości próby dla każdej realizacji i każdego elementu systemu. Pozwala to w trakcie symulacji koncentrować się na elementach słabych, statystycznie istotnych oraz na kryteriach jakości. Możliwa jest również ocena wkładu poszczególnych elementów lub ich grup w niezawodność systemu.
Procedura projektowania systemów konstrukcyjnych polega wówczas na optymalizacji systemu poprzez modyfikację własności grup elementów o podobnym charakterze. Współcześnie optymalizacja taka powinna być prowadzona na drodze analizy wrażliwości niezawodności, stanowiącej obiektywną, zintegrowaną miarę wytrzymałości, stateczności i użytkowalności systemu.
Znajomość prędkości zmian niezawodności (wrażliwości niezawodności) w trakcie procedury projektowej ma kluczowe znaczenie zarówno dla inżyniera, jak i dla pomocniczych algorytmów optymalizacji matematycznej.
Kalibracja częściowych współczynników bezpieczeństwa a FORM
W praktyce inżynierskiej kalibracja współczynników częściowych bezpieczeństwa prowadzona jest w ramach podejścia LRFD (Load and Resistance Factor Design) i bywa często realizowana z wykorzystaniem lokalnych metod niezawodności, w szczególności metody FORM. Podejście to zostało szeroko opisane i stosowane w literaturze jako relatywnie prosty sposób powiązania docelowych poziomów niezawodności z wartościami projektowymi oddziaływań i nośności (Jacinto et al. 2015) [88].
Jednocześnie nowsze prace wskazują, że wiele współczesnych procedur semi-probabilistycznych, w tym kalibracje współczynników materiałowych i obciążeniowych, nadal opiera się na założeniach lokalnej aproksymacji powierzchni granicznej i w konsekwencji dziedziczy ograniczenia metody FORM, takie jak wrażliwość na nieliniowości, wielopunktowość oraz istotny wpływ ciężkich ogonów rozkładów zmiennych losowych (Vadalà 2024) [89].
Tymczasem z przeglądów nowoczesnych technik redukcji wariancji oraz importance sampling wynika, że efektywne metody symulacyjne umożliwiają bezpośrednią estymację prawdopodobieństwa awarii oraz odpowiadających mu kwantyli z kontrolowanym błędem statystycznym i znacznie mniejszą podatnością na niekorzystne cechy rozkładów wejściowych (Tabandeh et al. 2022) [90]. W tym ujęciu współczynniki częściowe γ jawią się jako parametry wynikowe estymacji probabilistycznej, a nie jako wielkości geometryczne, co otwiera drogę do ich wyznaczania w ramach uogólnionych, systemowych modeli niezawodności opartych na bezpośredniej estymacji miary ryzyka, bez konieczności odwoływania się do lokalnych indeksów geometrycznych.
Wnioskiem płynącym z powyższych prac nie jest stwierdzenie, że stosowanie lokalnych, geometrycznych metod aproksymacyjnych, takich jak FORM, prowadzi wprost do katastrof budowlanych. Ich nieadekwatność nie ujawnia się bowiem w sposób bezpośredni i spektakularny, lecz ma charakter pośredni i systemowy. Wpływ metod FORM i pokrewnych na praktykę inżynierską realizuje się głównie poprzez ich udział w procesie kalibracji współczynników częściowych bezpieczeństwa – materiałowych i obciążeniowych – stosowanych następnie w normach projektowych. To właśnie na tym etapie niedoskonałości lokalnych metod aproksymacyjnych ulegają „rozmyciu”, a ich konsekwencje zostają ukryte w rozbudowanym systemie współczynników bezpieczeństwa.
W efekcie rzeczywiste przyczyny awarii i katastrof budowlanych są zazwyczaj przypisywane błędom producentów elementów i prefabrykatów, wykonawców robót in situ lub projektantów konstrukcji, a także pozornie błędnym schematom statycznym, niewłaściwej identyfikacji obciążeń i warunków gruntowych bądź niedoskonałościom modeli numerycznych (np. zbyt rzadkiemu lub zbyt gęstemu siatkowaniu MES). Brakuje natomiast systematycznych analiz długookresowego, destrukcyjnego wpływu nadmiernie rozbudowanego systemu współczynników częściowych, którego kalibracja opiera się na metodach o ograniczonej zdolności estymacji rzeczywistej miary ryzyka.
Mierzenie niezawodności konstrukcji jednym współczynnikiem β jest podejściem zasadnym z punktu widzenia teorii systemów niezawodnościowych o charakterze szeregowym, jednak konsekwentnie wymaga stosowania do jego estymacji metod obiektywnie poprawnych i uniwersalnych, zdolnych do bezpośredniej estymacji prawdopodobieństwa awarii oraz kwantyli rozkładów w ogonach. W tym kontekście powraca fundamentalne pytanie, czy historyczne podejście oparte na jednym współczynniku pewności, jawnie związanym z miarą probabilistyczną, nie stanowiło rozwiązania bardziej przejrzystego i metodologicznie spójnego niż współczesny, silnie pośredni system współczynników częściowych, którego rzeczywista relacja z niezawodnością konstrukcji pozostaje trudna do jednoznacznej identyfikacji.
Analiza krytyczna literatury dotyczącej ewolucji podejść normowych prowadzi do wniosku, że zarówno historyczne koncepcje pojedynczego współczynnika bezpieczeństwa, jak i późniejsze formalizacje w postaci projektowania stanów granicznych i formatów LRFD, nie zostały zastąpione dlatego, że były zasadniczo błędne, lecz dlatego, że dążyły do coraz dokładniejszego rozdzielenia źródeł niepewności. Paradoksalnie jednak to właśnie ta segmentacja, realizowana poprzez system częściowych współczynników bezpieczeństwa, doprowadziła do obecnego stanu, w którym relacja pomiędzy niezawodnością konstrukcji a parametrami normowymi stała się pośrednia, rozproszona i trudna do jednoznacznej interpretacji. Krytyczne opracowania wskazują, że przejście od jednego współczynnika pewności do wieloparametrowego systemu $\gamma$ nie zwiększyło w sposób proporcjonalny przejrzystości ani kontroli ryzyka, lecz w wielu przypadkach doprowadziło do jego „rozmycia” pomiędzy liczne parametry regulacyjne, których wzajemne oddziaływanie nie jest jawnie powiązane z miarą probabilistyczną. W konsekwencji współczesne formaty normowe nie tyle eliminują niepewność, co ją redystrybuują pomiędzy poziomy projektowania, wykonawstwa i kontroli jakości.
Zastosowanie metody półodwrotnej, polegającej na doborze parametrów regulacyjnych na podstawie zadanego efektu końcowego, nie stanowi samo w sobie błędu metodologicznego. Przeciwnie, podejście to ma długą i ugruntowaną tradycję w klasycznej mechanice, gdzie było z powodzeniem stosowane m.in. w teorii sprężystości. W tym sensie kalibracja współczynników częściowych γ względem wymaganego poziomu niezawodności jest procedurą w pełni uprawnioną. Problem pojawia się dopiero wówczas, gdy narzędziem tej kalibracji staje się lokalny, geometryczny estymator niezawodności, który nie zachowuje jednoznacznej relacji z rzeczywistym prawdopodobieństwem awarii.
W Przykładzie 10 wykazano, że konstrukcja zaprojektowana w pełnej zgodności z obowiązującymi przepisami normowymi, w tym z Eurokodem 3, może charakteryzować się rzeczywistym poziomem niezawodności istotnie różnym od poziomu implikowanego przez normowy system współczynników częściowych. Wynik ten nie jest konsekwencją błędów projektowych, nieprawidłowego schematu statycznego ani niedoskonałości modelu numerycznego, lecz wynika bezpośrednio z faktu, że zastosowane współczynniki bezpieczeństwa nie są skalibrowane względem obiektywnej miary ryzyka.
Przykład 11 stanowi bezpośrednią kontynuację tej analizy. Zamiast pytać, jaki poziom niezawodności odpowiada zadanym współczynnikom częściowym, rozpatrzono problem odwrotny: jakie wartości współczynników γ należałoby przyjąć, aby rzeczywiste prawdopodobieństwo awarii – wyznaczone metodami symulacyjnymi – odpowiadało docelowemu poziomowi niezawodności. Odwrócona kalibracja przeprowadzona na tym samym obiekcie, zaprojektowanym zgodnie z Eurokodem, prowadzi do wartości współczynników bezpieczeństwa istotnie różnych od normowych, co jednoznacznie wskazuje, że źródłem rozbieżności nie jest projekt jako taki, lecz metoda kalibracji leżąca u podstaw systemu normowego.
Metoda binarna dynamiczna (BDSM) w kontekście FORM, RSM i Monte Carlo
Przedstawione powyżej rozważania prowadzą do wniosku, że rozwój metod niezawodności konstrukcji przebiegał od metod silnie aproksymacyjnych (FORM/SORM), poprzez metody metamodelowe (RSM), i powrócił do metod symulacyjnych Monte Carlo(w odmianie szybkiej), które jako jedyne nie narzucają struktury geometrycznej przestrzeni niezawodności ani postaci funkcji granicznej. Każdy z tych etapów redukował ograniczenia poprzedniego, lecz jednocześnie ujawniał nowe problemy, związane przede wszystkim z kosztami obliczeń, zbieżnością estymatorów oraz interpretacją wyników w ujęciu dynamicznym i systemowym.
Metody FORM/SORM opierają się na lokalnej aproksymacji powierzchni granicznej i prowadzą do pojedynczego wskaźnika niezawodności β. W ujęciu praktycznym wskaźnik ten nie niesie informacji o czasie wystąpienia uszkodzenia, o sekwencji zdarzeń ani o sprzężeniach pomiędzy elementami systemu. Metody te tracą jednoznaczność w przypadku wielu mechanizmów zniszczenia, ujemnych krzywizn powierzchni granicznych oraz konstrukcji bliskich stanom osobliwym.
Metoda powierzchni odpowiedzi (RSM) eliminuje część tych ograniczeń poprzez wprowadzenie metamodelu odpowiedzi konstrukcji, jednak nadal pozostaje metodą pośrednią. Jakość wyników zależy bezpośrednio od jakości aproksymacji, a błąd metamodelu przenosi się wprost na wynik analizy niezawodności. RSM nie rozwiązuje również w sposób naturalny problemów silnej korelacji zdarzeń, sekwencyjności uszkodzeń ani dynamiki procesu degradacji.
Metody Monte Carlo, zwłaszcza w wersjach szybkich i adaptacyjnych, umożliwiają bezpośrednią analizę rzeczywistych modeli numerycznych i procesów losowych bez potrzeby aproksymacji geometrycznej. Ich podstawowym ograniczeniem pozostaje jednak koszt obliczeniowy, szczególnie w analizach dynamicznych, wielowymiarowych i systemowych, gdzie istotne są nie tylko wartości prawdopodobieństw, lecz także struktura zależności pomiędzy zdarzeniami.
W tym kontekście naturalnym rozwinięciem metod symulacyjnych jest binarna, dynamiczna metoda silnego poziomu korelacji (BDSM), omawiana w III części pracy. Metoda ta nie operuje ciągłą funkcją stanu granicznego ani jej aproksymacją, lecz bezpośrednio na zbiorze zdarzeń elementarnych i ich realizacjach w czasie. Stan systemu opisywany jest binarnie (stan dopuszczalny / stan niedopuszczalny), a kluczową rolę odgrywa dynamika przejść pomiędzy tymi stanami oraz korelacje pomiędzy zdarzeniami cząstkowymi.
W przeciwieństwie do FORM i RSM, metoda BDSM:
- nie wymaga istnienia ani różniczkowalności funkcji granicznej,
- nie opiera się na lokalnych aproksymacjach geometrycznych,
- jest naturalnie przystosowana do analizy wielu mechanizmów zniszczenia,
- umożliwia jawne uwzględnienie sekwencji zdarzeń i ich zależności czasowych,
- pozwala na bezpośrednią identyfikację elementów i grup elementów krytycznych dla niezawodności systemu.
W porównaniu z metodami Monte Carlo, BDSM nie zastępuje symulacji losowej, lecz ją porządkuje i strukturyzuje. Może być interpretowana jako metoda redukcji wymiaru i złożoności problemu poprzez przejście z opisu ciągłego na opis binarny, przy jednoczesnym zachowaniu informacji o korelacjach i dynamice procesu. W tym sensie metoda BDSM może być stosowana współbieżnie z metodami SMC, tworząc schemat hybrydowy: Monte Carlo generuje realizacje procesu, natomiast BDSM identyfikuje, agreguje i interpretuje zdarzenia krytyczne na poziomie systemowym.
Metoda BDSM usuwa tym samym zasadnicze słabości metod FORM/SORM, a jednocześnie ogranicza koszty obliczeniowe klasycznych i szybkich metod Monte Carlo w analizach dynamicznych dużych systemów konstrukcyjnych. Z tego względu stanowi ona nie tylko metodę konkurencyjną wobec metod normowych, lecz także logiczne rozwinięcie współczesnych metod symulacyjnych w analizie niezawodności konstrukcji.
Część IIb: Model binarny konstrukcji
Podstawowe struktury niezawodnościowe
Z probabilistycznego punktu widzenia można przyjąć, że element „i” ma jedną określoną postać niespełnienia niezawodności. Natomiast ustrój, czyli zbiór elementów może mieć więcej niż jedną postać, ale też może także składać się z dwóch lub więcej elementów, charakteryzujących się jedną postacią niespełnienia.
Omówione niżej systemy szeregowe (łańcuchy) są modelem konstrukcji statycznie wyznaczalnych. Systemy równoległe (wiązki) są modelem konstrukcji statycznie niewyznaczalnych.
Na rys. 7 pokazano schematy blokowe podstawowych struktur niezawodnościowych: szeregowych i równoległych. Przykładem struktury szeregowej jest statycznie wyznaczalna konstrukcja (kratownica, rama, płyta , itd) . Przykładem struktury równoległej jest konstrukcja statycznie niewyznaczalna. Zarówna system szeregowy jak i równoległy (lub systemy mieszane szeregowo-równoległe) są modelami tradycyjnych systemów konstrukcyjnych, z elementami wbudowanymi na stałe (obciążonymi).
Przykładem konstrukcji z rezerwą nieobciążoną jest konstrukcja z elementami rezerwowymi włączanymi w system w przypadku awarii jakiegokolwiek innego elementu. Takie konstrukcje wymagają stałej obsługi, lecz w dobie automatycznego monitoringu i informatyzacji staną się ważną klasą systemów konstrukcyjnych.

Rys.7. Podstawowe modele niezawodnościowe: a) szeregowy, b) równoległy czyli rezerwy obciążonej , c) rezerwy nieobciążonej [91]
Analizujemy systemy, w których uszkodzenia elementów $\overline \Omega_i$ są zdarzeniami wzajemnie niezależnymi. Niezależnymi są więc również zdarzenia dopełniające $\Omega_i$.
Szeregowa struktura niezawodnościowa. Statystyczny efekt skali (osłabienia)
W systemie (strukturze, układzie, modelu, schemacie ) szeregowym cały system pracuje, jeśli wszystkie elementy pracują, to znaczy system szeregowy ulega awarii, jeśli choć jeden z elementów ulegnie awarii.
Przykładem konstrukcji z rezerwą nieobciążoną jest konstrukcja z elementami rezerwowymi włączanymi w system w przypadku awarii jakiegokolwiek innego elementu. Takie konstrukcje wymagają stałej obsługi, lecz w dobie automatycznego monitoringu i informatyzacji staną się ważną klasą systemów konstrukcyjnych.
W tym przypadku przy liczbie elementów $n$:
\begin{equation} p_s = Pr \,\{ \Omega_1 \bigcap \Omega_2 \ldots \bigcap\Omega_n \}\tag{IIb.1}\label{IIb.1} \end{equation}
i w ślad za przyjętym założeniem o niezależności uszkodzeń elementów
\begin{equation} p_s=Pr \, \{ \Omega_1 \} \cdot Pr \, \{ \Omega_2 \} \cdot … \cdot Pr \, \{ \Omega_n \}\tag{IIb.2}\label{IIb.2} \end{equation}
czyli
\begin{equation} p_s= \prod \limits_{i=1}^n p_{s_i}\tag{IIb.3}\label{IIb.3} \end{equation}
Formuła ($\ref{IIb.3}$) jest zasadą mnożenia niezawodności (prawdopodobieństw bezawaryjnej pracy) elementów systemu szeregowego. Wyraża ona również tak zwany
Statystyczny efekt skali: „im więcej elementów zawiera system szeregowy, tym mniejsza jest jego niezawodność”.
W celu doświadczalnego potwierdzenia zasady ($\ref{IIb.2}$) można przeprowadzić doświadczenie z nitką. W celu urwania nitki rozwijamy ją ze szpuli i łatwo zrywamy, ale jeśli nie można jej rozwinąć i nitka jest krótka, to trudno ją zerwać i trzeba użyć nożyczek do przecięcia nitki.
Z zależności ($\ref{IIb.3}$) wynika, że nigdy niezawodność systemu szeregowego nie jest większa od niezawodności najsłabszego elementu (ogniwa). W takim razie dla systemu szeregowego mamy:
\begin{equation}p_s \le \min \limits_i p_{s_i} \tag{IIb.4}\label{IIb.4} \end{equation}
Jeśli oznaczymy przez $p_{f_i}$ prawdopodobieństwo zniszczenia i-tego elementu, to ($\ref{IIb.3}$) możemy zapisać w postaci:
\begin{equation} p_s= \prod \limits_{i=1} \limits^n (1-p_{f_i})\tag{IIb.5}\label{IIb.5} \end{equation}
Rozkładając wielomian, będący wynikiem iloczynu ($\ref{IIb.5}$) w szereg Newtona i odrzucając wyrazy rzędu wyższego niż liniowy (które są istotnie mniejsze o członów liniowych, bowiem bardzo małe są prawdopodobieństwa zniszczenia poszczególnych elementów budowlanych), otrzymamy oszacowanie
\begin{equation} p_s \cong 1- \sum \limits_{i=1} \limits^n p_{f_i} \tag{IIb.6}\label{IIb.6} \end{equation}
Na rys. 8 pokazano zależność niezawodności systemu szeregowego $p_s$ od liczby n elementów o takiej samej niezawodności elementów $p_{si}=0,95 ; 0,98$ lub $0,99$.
Spadek niezawodności systemu wraz ze zwiększaniem się liczby elementów jest bardzo szybki, a zwiększanie niezawodności pojedynczych elementów wpływa stosunkowo mniej na zwiększenie niezawodności systemu.

Rys. 8 Niezawodność systemu szeregowego $p_s$ w funkcji liczby elementów $n$ [91]
Statystyczny efekt skali obserwowany jest zarówno w prętach, jak i w ustrojach powierzchniowych (powłoki, płyty, ściany), a także w ustrojach trójwymiarowych (bryłach). Systematycznie obserwuje się, że konstrukcja o większych rozmiarach (większej liczbie elementów skończonych) jest słabsza od konstrukcji z mniejszą liczba elementów.
Zwiększenie niezawodności systemu szeregowego najlepiej przeprowadzić, realizując strategię:
- wyszukać najsłabszy element w systemie i zwiększyć jego nośność, więc również niezawodność
- sprowdzić nośność systemu i w przypadku niezadawalającego wyniku, przeprowadzić pkt 1 dla kolejnego elementu
- po każdym kroku starać się zmniejszyć liczbę elementów połączonych szeregowo.
W opisanej strategii uwzględniono dwa ważne wnioski z przeprowadzonych analiz:
1) o nośności i niezawodności systemu szeregowego decyduje najsłabszy element (najsłabsze ogniowo),
2) niezawodność systemu szeregowego gwałtownie spada wraz z e zwiększającą się liczbą elementów połączonych szeregowo.
3) niezawodność systemu szeregowego zależy nie tylko od liczby elementów (ogniw) składowych, ale także od poziomu ich niezawodności.
Równoległa struktura niezawodnościowa. Statystyczny efekt wzmocnienia
System z elementami połączonymi równolegle (rys.7b) nie ulegnie zniszczeniu, dopóki nie zniszczą się wszystkie elementy systemu o liczebności $m$. Niezawodność $p_s$ systemu równoległego wyznaczymy z zależności:
\begin{equation} p_s = Pr \, \{ \bar \Omega_1 \bigcap \bar \Omega_2 \ldots \bigcap \bar \Omega_m \} = Pr \, \{ \Omega_1 \bigcup \Omega_2 \ldots \bigcup \Omega_m \} \tag{IIb.7}\label{IIb.7}\end{equation}
gdzie $\Omega_i$ oraz $\overline \Omega_i$ – są wzajemnie dopełniającymi zdarzeniami – zdarzenie oznaczone nadkreśleniem oznacza zdarzenie przeciwne i w tym przypadku zniszczenie elementu.
Jeśli zdarzenia $\Omega_i$ są wzajemnie niezależne, to również $ \overline \Omega_i $ są wzajemnie niezależne, a jeśli tak, to zachodzi:
\begin{equation} p_s = 1-p_f=1-\prod \limits_{i=1} \limits ^m (1-p_{si}) \tag{IIb.8}\label{IIb.8}\end{equation}
Takie połączenie równoległe (elementów obciążonych – wbudowanych na stałe) jest typowe dla tradycyjnych konstrukcji budowlanych.
Na rys.9 pokazano zależność niezawodności $p_s$ systemu równoległego od liczby $m$ elementów w wiązce o takiej samej niezawodności każdego elementu $p_{si}$. Obserwujemy zwiększanie się niezawodności systemu równoległego wraz ze zwiększaniem się liczby elementów w wiązce.
Przy dużych niezawodnościach elementów ( z takimi mamy do czynienia w budownictwie) przyrost niezawodności systemu równoległego jest wolny dla liczby elementów większych od 3-ch., a przy podłączeniu czwartego elementu praktycznie nie obserwujemy zwiększenia niezawodności systemu .

Rys.9. Niezawodność systemu równoległego $p_s$w funkcji niezawodności elementów $p_{si}$. Krzywe dla różnej liczby elementów $m$ [91]
Własności systemu równoległego powodują, że zwykle rozumie się go jako sposób zwiększenia niezawodności systemu poprzez zwiększenie liczby elementów połączonych równolegle. Jednakże taka cecha struktury nie zawsze skutecznie prowadzi do celu. Zwiększanie liczby elementów równoległych powyżej czterech okazuje się narzędziem mniej skutecznym i w istocie niezbyt wygodnym w stosunku do prostej wymiany jednego elementu na element o większej niezawodności.
Tym niemniej należy zauważyć, że w systemie równoległym następuje statystyczny efekt zwiększenia niezawodności systemu wraz ze zwiększającą się liczbą elementów składowych. Obserwujemy więc zjawisko przeciwne niż w systemach szeregowych.
Wynika stąd ważny wniosek dla Konstruktora konstrukcji budowlanych:
Połączenia szeregowe elementów konstrukcji (statycznie wyznaczalnych) prowadzą do istotnego zmniejszania niezawodności, natomiast połączenia równoległe elementów konstrukcji (statycznie niewyznaczalnych) prowadzą do niewielkiego zwiększenia niezawodności systemu, wraz ze zwiększaniem się liczby elementów.
Złożone modele
W budowlanej praktyce inżynierskiej mamy najczęściej do czynienia ze złożonymi strukturami niezawodnościowymi, polegającymi na połączeniu w szereg struktur równoległych lub równoległym połączeniu łańcuchów lub też innych struktur i na dodatek z elementami wspólnymi w różnych strukturach.
Na rys. 10 pokazano model struktury z podzielonym rezerwowaniem, czyli strukturę w której systemy równoległe połączono w szereg.

Rys. 10 Struktura z podzielonym rezerwowaniem (równoległe w szeregu) [91]
Przykładem takiej struktury jest konstrukcja z powielonymi układami statycznie niewyznaczalnymi. W tym przypadku prawdopodobieństwo bezawaryjnej pracy mxn elementów, każdy o niezawodności $p_{si}$ można obliczyć z zależności
\begin{equation} p_{s, podzielone} = [1-(1-p_{si})^m]^n \tag{IIb.9}\label{IIb.9}\end{equation}
gdzie m jest liczbą elementów w każdej strukturze równoległej, a n liczbą ogniw w łańcuchu.
Na rys. 11 przedstawiono wykresy uzyskane z zależności ($\ref{IIb.9}$).

Rys.11. Podzielone rezerwowanie [91]: $n$ – liczba elementów połączonych szeregowo; $m$ – liczba równoległych połączeń ; linie przerywane dla $p_{si}=0,9$, linie ciągłe dla $p_{si}=0,7$
Rys.11. Podzielone rezerwowanie [91]: $n$ – liczba elementów połączonych szeregowo; $m$ – liczba równoległych połączeń ; linie przerywane dla $p_{si}=0,9$, linie ciągłe dla $p_{si}=0,7$
Na rys. 12 pokazano model struktury z ogólnym rezerwowaniem, czyli ze strukturami szeregowymi, połączonymi równolegle.

Rys. 12 Struktura z ogólnym rezerwowaniem (równoległe w szeregu) [91]
W tym, przypadku niezawodność struktury można obliczyć z zależności
\begin{equation} p_{s, ogolne} =1-(1-p_{si}^n)^m \tag{IIb.10}\label{IIb.10}\end{equation}
Na rys.13 przedstawiono zależności uzyskane z formuły ($\ref{IIb.10}$).

Rys.13. Ogólne rezerwowanie [91] : $n$ – liczba elementów połączonych szeregowo; $m$ – liczba równoległych połączeń ; linie przerywane dla $p_{si}=0,9$, linie ciągłe dla $p_{si}=0,7$
Zależności ($\ref{IIb.9}$), ($\ref{IIb.10}$) można uogólnić na przypadek, gdy struktury mają inną liczbę elementów $m$ i $n$ w sposób pokazany w pracy [91] .
Dla przypadków bardziej ogólnych połączeń zaleca się [91] rozpatrywać iteracyjnie, analizując możliwe kombinacje połączeń.
Wykresy rys. 6 i 8 pokazują , że na niezawodność systemu najbardziej wpływa liczba elementów połączonych szeregowo. Wpływ liczby połączeń równoległych jest istotny przy niewielkiej liczbie połączeń i dla $m>4$ jest praktycznie nieistotny. Wpływ liczby elementów i połączeń zmniejsza się jeśli niezawodność poszczególnych elementów jest duża, co jest charakterystyczne dla konstrukcji budowlanych. Wprowadzenie rezerwowych elementów daje lepsze efekty od wprowadzenia rezerwowych układów.
Wynika stąd, że konieczne jest rozpatrywanie struktury w całości. Projektowanie konstrukcji element po elemencie bez analizy połączeń niezawodnościowych może prowadzić do istotnego niedowymiarowania konstrukcji i wywołania katastrofy budowlanej, czego przykłady dostarczane nam są dość często.
Niezawodność konstrukcji należy rozpatrywać we wczesnym stadium projektowania, wówczas gdy wniesienie zmian nie powoduje znacznych strat, co będzie najbardziej znaczące na etapie eksploatacji.
Korelacja konstrukcyjna
Korelacja funkcyjna jest mierzona współczynnikiem korelacji ($\ref{I.20}$). Konstrukcyjny współczynnik korelacji będziemy szacować analogicznie, z zależności uzyskiwanych na teoretycznym modelu konstrukcji ( zależności teorii sprężystości lub mechaniki ), albo też w wyniku nadań numerycznych na modelu MES, bądź z modelu poddanego badaniom eksperymentalnym.
Statyczna liniowość nie oznacza liniowości probabilistycznej bowiem konstrukcja zwiera wiele zmiennych losowych o różnych rozkładach i powiązanych nieliniowo. Ponadto konstrukcje rzeczywiste są obarczone szeregiem imperfekcji geometrycznych (imperfekcje systemowe, czyli odchylenia węzłów od położenia nominalnego i imperfekcje lokalne, czyli wstępne wygięcia i skręcenia nominalnie prostych elementów prętowych i płytowych lub odchylenia od powierzchni nominalnej powłok, a także inne.
Momenty statystyczne (wartości oczekiwane, odchylenia standardowe oraz kowariancje i korelacje) losowych zmiennych wyjściowych (przemieszczenia, siły przekrojowe lub mnożnik nośności) konstrukcji rzeczywistych najczęściej wyznaczane są numerycznie. Natomiast charakterystyki statystyczne i typy rozkładów zmiennych wejściowych ( materiałów, geometrii systemu i elementów, obciążeń) uzyskuje się z pomiarów bezpośrednich.
Oszacowania niezawodności dla struktur złożonych
Ścisłe wyznaczenie niezawodności mieszanych (złożonych ) struktur z punktu widzenia niezawodności jest trudne nawet z wykorzystaniem komputera i w praktyce nie jest konieczne. Zamiast dokonywania rachunków na iloczynach splotowych dystrybuant, korzysta się z oszacowań górnego i dolnego prawdopodobieństwa zniszczenia lub niezawodności. W artykule przedstawiono klasyczne oszacowania, przydatne w obliczeniach ręcznych, oraz oszacowania dokładniejsze, możliwe w obliczeniach numerycznych, wymagające znajomości łącznego rozkładu statystycznego zniszczenia elementów systemu lub przynajmniej informacji o rozkładach brzegowych oraz o jak największej liczbie parametrów tych rozkładów i korelacji między rozkładami.
Ścieżki i cięcia (przekroje) struktury
Struktury niezawodnościowe są skorelowane, ponieważ najczęściej posiadają elementy wspólne. Uzyskanie ścisłych wyrażeń na niezawodność lub prawdopodobieństwo zniszczenia dowolnych struktur jest zadaniem złożonym, dlatego ważne są oszacowania górne i dolne prawdopodobieństwa zniszczenia.
Mechanizm zniszczenia struktury polega na zniszczeniu tylu elementów w strukturze, by cała struktura uległa zniszczeniu. W pracy [92] wprowadzono następujące definicje:
Ścieżka (ścieżka zdatności) systemu, jest takim podzbiorem elementów systemu, że przy zdatności wszystkich elementów należących do tego zbioru, system jest w stanie zdatności. Ścieżkę nazywamy minimalną, gdy nie zawiera żadnej innej ścieżki jako podzbioru. Ścieżkę nazywa się krytyczną ze względu na element, gdy utrata zdatności przez ten element powoduje utratę zdatności przez system. Każda minimalna ścieżka jest krytyczna ze względu na dowolny swój element.
Struktura szeregowa jest więc minimalną ścieżką, w którym zniszczenie jednego elementu prowadzi do zniszczenia układu.
Cięcie (przekrój) systemu, jest takim podzbiorem elementów systemu takim, że niezdatność wszystkich elementów należących do tego zbioru, prowadzi do niezdatności systemu. Cięcie nazywamy minimalnym, gdy nie zwiera jako podzbioru żadnego innego cięcia.
Struktura równoległa jest cięciem systemu.
Na rys. 9 zilustrowano mechanizm struktury szeregowo-równoległej. System tego typu przedstawiono na rys.14a, a jego minimalne ścieżki na rys.14b, oraz minimalne ciecia na rys 14c

Rys. 14 Minimalne cięcia b) i minimalne ścieżki c) dla systemu złożonego a) [93],rys.3.17
System z rys. 11a ma następujące ścieżki i cięcia:
- ścieżki zdatności systemu
{1,2,3,4}, }{1,2,3}, {1,2,4}, {1,2}, {1,3,4}, z których dwie ostatnie (pogrubione) są ścieżkami minimalnymi, pokazanymi na rys. 9b). - cięcia systemu
{1,2,3,4}, {1,2,3}, {1,2,4}, {2,3,4}, {1,2}, {1,3}, {1,4}, {2,3}, {2,4}, {1}, z których trzy ostatnie (pogrubione) są cięciami minimalnymi.
W ogólnym przypadku należy wyznaczyć cięcie (przekrój) struktury takie, że zniszczenie wszystkich elementów z tych zbiorów prowadzi do zniszczenia konstrukcji. Na takim k-tym cięciu może być uruchomiony mechanizm zniszczenia $M_k$. Zdarzenie polegające na uruchomienia mechanizmu $M_k \ (k=1,…,n)$ oznaczmy przez $Z_k$, a prawdopodobieństwo wystąpienia zdarzenia przez
\begin{equation} { Pr \, \{Z_k\}=p_k \ , (k=1,2,..,n) }\tag{IIb.11}\label{IIb.11}\end{equation}
Zdarzenie polegające na uruchomieniu dowolnego mechanizmu i w konsekwencji zniszczenia oznaczymy przez $Z$, a prawdopodobieństwo jego wystąpienia przez
\begin{equation} { Pr \, \{Z\} } =p_f \tag{IIb.12}\label{IIb.12}\end{equation}
Jeśli n mechanizmów jest możliwych, to zniszczenie struktury nastąpi, jeśli uruchomi się dowolny mechanizm, czyli:
\begin{equation} p_f =\Pr \left( \bigcup \limits _{k=1}^n Z_k\right) = \sum_{i} p_i – \sum_{i<j} p_{ij} +\sum_{i<j<k} p_{ijk} -\cdots\tag{IIb.13}\label{IIb.13}\end{equation}
Struktury progowe
Istnieje szereg struktur niezawodnościowych, których nie da się przedstawić za pomocą schematu blokowego, czyli nie jest strukturą szeregowo równoległą lub równoległo szeregową. Takie struktury nazywa się progowymi. Przykład struktury progowej „2 z 3” pokazano na rys. 15, Struktura progowa „2 z 3” oznacza, że system jest w stanie zdatności, gdy spośród trzech jego elementów przynajmniej dwa są w stanie zdatności.

Rys.15. Przykład struktury progowej: a) Struktura „2 z 3”, b) minimalne ścieżki, c) minimalne cięcia [93],rys.3.18
W konstrukcjach budowlanych statycznie niewyznaczalnych mamy w ogólności do czynienia z systemami progowymi „k z n”, to znaczy takimi systemami, w których n-elementowy system jest zdatny, jeśli zdatnych jest k elementów, przy czym $1 \le k \le n$. Na rys.16 pokazano przykłady uogólnionych struktur progowych .

Rys.16. Struktura progowa uogólniona: a) typowa struktura rezerwy nieobciążonej, b) struktura szeregowa, c) struktura równoległa, d) struktura „k z n” (opis w tekście) [93],rys.3.22
W modelu uogólnionej struktury progowej oprócz parametrów: „n” – liczba elementów struktury, „k”- liczba tych elementów systemu, które muszą być zdatne, jeśli system ma być zdatny, wprowadzamy parametr „m”- liczba elementów czynnych systemu $m \le n$. Pozostałe elementy systemu $n-m$ stanowią rezerwę nieobciążoną. Pokazane na rys. 11 struktury progowe ilustrują przypadki szczególne:$k=m=n$ – struktura szeregowa,
$k=1$, $m=n$ – struktura równoległa,
$m= n < k$ – struktura $k z n$ w węższym sensie,
$k=m=1$, $n>1$ – typowa struktura nieobciążona (rys. 16a),
$k=m ,n$ – struktura szeregowa z wędrującą rezerwą nieobciążoną (rys. 16c),
$k<m<n$ – struktura „k z n” z wędrującą rezerwą nieobciążoną (rys. 16d).
Oszacowania niezawodności konstrukcji budowlanej złożonej z elementów
Dolne i górne oszacowanie niezawodności
W analizie niezawodności konstrukcji budowlanych zasadnicze znaczenie ma wyznaczenie przedziału, w którym zawiera się prawdopodobieństwo przetrwania systemu $p_s = r $, gdzie r- niezawodność systemu . Przedział ten wyznaczają dolne $p_s^-$ i górne $p_s^+$ oszacowania niezawodności, dalej jest nazywany widełkami niezawodności.
\begin{equation} p_s^- \le p_s \le p_s^+ \tag{IIb.14}\label{IIb.14}\end{equation}
a w innym zapisie
\begin{equation} p_s \in [\,p_s^-,\,p_s^+\,] \tag{IIb.15}\label{IIb.15}\end{equation}
gdzie:
$p_s^-$ – bezpieczne (konserwatywne) dolne oszacowanie niezawodności,
$p_s^+$ – górne oszacowanie, wykorzystywane głównie do oceny dokładności.
W inżynierii podstawowe znaczenie ma dolne oszacowanie prawdopodobieństwa przetrwania konstrukcji $,$p_s^-$, które powinno być osiągnięte przez niezawodną konstrukcję.
W dalszym zapisie operuje się wyłącznie prawdopodobieństwem przetrwania $p_s$, z pominięciem prawdopodobieństwa zniszczenia $p_f$. Przyjęcie zapisu wyłącznie w kategoriach $p_s$: eliminuje błędy znaków nierówności, porządkuje narrację, jest w pełni zgodne z praktyką inżynierską, ułatwi przejście do binarnej i dynamicznej metody niezawodności.
Proste oszacowania strukturalne (oP) – Cornell ; BP – przypadek ogólny
Dla nieskorelowanych zdarzeń $Z_i$ oraz $Z_j$ prawdopodobieństwo zniszczenia systemu $p_f$ klasycznie zapisuje się w postaci rozwinięcia sumowo-iloczynowego
\begin{equation} p_f = p_1 + p_2 + \ldots + p_n – p_1 p_2 – p_1 p_3 – \ldots + p_1 p_2 p_3 – \ldots \tag{IIb.16}\label{IIb.16}\end{equation}
gdzie $p_i = \mathrm{Prob} \{Z_i \le 0\}$ – prawdopodobieństwo zniszczenia elementu „i” .
Niestety w praktyce inżynierskiej mechanizmy są rzadko nieskorelowane, więc potrzebne są oszacowania górne i dolne prawdopodobieństwa zniszczenia systemu $p_f$, z których najprostsze podał Cornell (1969) [94] (również Augusti, Baratta (1972) [95] i Barlow- Proschan (1974) [92] i in):
\begin{equation} p_s^- = 1 – \sum_{i=1}^{n} (1 – p_{s,i}) \le p_s \le p_s^+ = \min_{1 \le i \le n} p_{s,i} \tag{IIb.17}\label{IIb.17}\end{equation}
Zależność ($\ref{IIb.17}$) stanowi odpowiednik klasycznego oszacowania Cornella–Barlowa–Proschana, zapisanego wyłącznie w kategoriach niezawodności systemu. Dolna granica $p_s^-$ ma charakter konserwatywny i jest istotna z punktu widzenia bezpieczeństwa konstrukcji, natomiast górna granica $p_s^+$ służy jedynie do oceny szerokości widełek oszacowania.
Przypadek ogółny BP (Barlow-Proschan) dotyczy systemu z minimalnymi informacjami o stowarzyszeniu oraz cięciach i ścieżkach
Oszacowania Ditlevsena (oD) Proste oszacowania strukturalne (Cornell, BP-A) prowadzą do bardzo szerokich widełek niezawodności. W celu ich zawężenia, przy zachowaniu bezpieczeństwa obliczeń, Ditlevsen (1979) [96] zaproponował oszacowania wykorzystujące dodatkową informację o współwystępowaniu mechanizmów zniszczenia, tj. o prawdopodobieństwach parowych. Granice przedziału widełek ($\ref{IIb.14}$) lub ($\ref{IIb.15}$) wyznaczają oszacowania \begin{equation} p_s^- = \max \left[p_{s,\min}, \; 1 – \sum_{i=1}^{n} (1 – p_{s,i})+ \sum_{i=2}^{n} \max_{j<i} \left(p_{s,ij} – p_{s,i} – p_{s,j} + 1 , \; 0\right)\right] \tag{IIb.18}\label{IIb.18}\end{equation} \begin{equation} p_s^+ = \min \left[\min_{1 \le i \le n} p_{s,i},\;1 – \sum_{i=1}^{n} (1 – p_{s,i})+ \sum_{i=2}^{n} \min_{j<i}\left(p_{s,ij} – p_{s,i} – p_{s,j} + 1\right)\right] \tag{IIb.19}\label{IIb.19}\end{equation}
W praktyce inżynierskiej wystarczające jest często przyjęcie
\begin{equation} p_{s,ij} \approx \min(p_{s,i}, p_{s,j})\tag{IIb.20}\label{IIb.20}\end{equation}
Wyżej wprowadzono oznaczenia:
$p_{s,i} = \mathrm{Prob}\{ Z_i > 0 \}$ – niezawodność mechanizmu $i$,
$p_{s,ij} = \mathrm{Prob}\{ Z_i > 0 \,\cap\, Z_j > 0 \}$ – prawdopodobieństwo jednoczesnego przetrwania mechanizmów $i$ i $j$.
$p_{s,\min} \stackrel{\mathrm{def}}{=} \min_{1 \le i \le n} p_{s,i}$,Uwagi:
1) Oszacowania Ditlevsena nie wymagają znajomości pełnego rozkładu łącznego, a jedynie niezawodności pojedynczych mechanizmów oraz wybranych par i dają przedział zawsze węższy lub równy widełkom Cornella–BP, wykorzystując ograniczoną informację parową zamiast pełnego rozkładu wspólnego.
2) Dolne oszacowanie $p_s^-$ pozostaje bezpieczne i może być bezpośrednio stosowane w ocenie konstrukcji,
3) Metoda stanowi naturalny pomost pomiędzy: metodami FORM dla pojedynczych mechanizmów, metodami binarnymi (0/1), opisem systemowym i dynamicznym.
Oszacowania Żukowski (oŻ)
W celu wyznaczenia $p_{ij}$ należałoby znać dystrybuantę łączną dwuwymiarowego rozkładu marginesów bezpieczeństwa dla zdarzeń $Z_i$ i $Z_j$. Można też posłużyć się kolejnymi oszacowaniami podanymi przez Żukowskiego (2006) [97] :
\begin{equation} p_{ij} \ge \max \left\{ p_i \, p_{j|i},\; p_j \, p_{i|j} \right\} \quad \text{dla } \rho_{ij} > 0 \tag{IIb.21}\label{IIb.21}\end{equation}
\begin{equation} p_{ij} \le \min \left\{ p_i \, p_{j|i},\; p_j \, p_{i|j} \right\} \quad \text{dla } \rho_{ij} < 0 \tag{IIb.22}\label{IIb.22}\end{equation}
gdzie
$ \rho_{ij}$ – współczynnik korelacji zmiennych $Z_i$ oraz $Z_j$- został zdefiniowany w ($\ref{I.20}$) dla $(X = Z_i \, ;\, Y=Z_j)$
Warunkowe prawdopodobieństwa zniszczenia można oszacować z zależności:
\begin{equation} p_{i|j} = \frac{p_i – \rho_{ij} \, p_j}{\sqrt{1 – \rho_{ij}^2}} \tag{IIb.23}\label{IIb.23}\end{equation}
Zależność (108) ma charakter przybliżony i obowiązuje wyłącznie dla zmiennych normalnych w przestrzeni standaryzowanej.
W celu przejścia na oszacowania $p_s$, po zastosowaniu zależności: $p_{s,i} = 1 – p_i$ oraz $p_{s,ij} = 1 – p_i – p_j + p_{ij}$ , a po przekształceniach uzyskamy formułę
\begin{equation} p_{s,ij} \ge 1 – p_i – p_j + \max \left\{ p_i \, p_{j|i},\; p_j \, p_{i|j} \right\} \quad \text{dla } \rho_{ij} > 0\tag{IIb.24}\label{IIb.24}\end{equation}
W przypadku posługiwania się wskaźnikiem niezawodności \beta, należy skorzystać z definicji ($\ref{I.1}$)). Po podstawianiu do zależności ($\ref{IIb.16}$) – ($\ref{IIb.22}$) i korzystając z monotonicznej własności dystrybuanty rozkładu normalnego $\Phi()$ i jej addytywności warunkowe wskaźniki niezawodności można zapisać w postaci [97] :uzyskamy stosowne zależności dla inżynierskiej miary niezawodności- współczynnika $\beta$.
\begin{equation} \beta_{i|j} = \frac{\beta_i – \rho_{ij} \, \beta_j} {\sqrt{1 – \rho_{ij}^2}} \tag{IIb.25}\label{IIb.25}\end{equation}
\begin{equation} \beta_{j|i} = \frac{\beta_j – \rho_{ij} \, \beta_i}{\sqrt{1 – \rho_{ij}^2}}\tag{IIb.26}\label{IIb.26}\end{equation}
Zależności ($\ref{IIb.23}$) do ($\ref{IIb.26}$) mają charakter przybliżony i obowiązują w przypadku, gdy zdarzenia $Z_i$ oraz $Z_j$ są generowane przez funkcje graniczne o normalnych rozkładach w przestrzeni standaryzowanej, a korelacja $\rho_{ij}$ jest korelacją liniową zmiennych normalnych.
Oszacowania Żukowskiego umożliwiają przybliżone wyznaczenie prawdopodobieństw parowych bez konieczności znajomości pełnej dystrybuanty łącznej. Mają one charakter przybliżony i obowiązują w przypadku, gdy zmienne $Z_i$ oraz $Z_j$ są normalne w przestrzeni standaryzowanej, a współczynnik $\rho_{ij}$ opisuje korelację liniową. W praktyce inżynierskiej oszacowania te są wystarczające do zawężania widełek niezawodności w metodach BP–Ditlevsena oraz w binarnych modelach niezawodnościowych.
Oszacowania ($\ref{IIb.18}$) i ($\ref{IIb.19}$) stosuje się w obliczeniach numerycznych. Natomiast w obliczeniach ręcznych pozostajemy przy ($\ref{IIb.16}$) i ($\ref{IIb.17}$), które w większości przypadków praktycznych dają wystarczające przybliżenie dla wysoko niezawodnych systemów, czyli takich jakie występują w budownictwie, a zawężenie granic ($\ref{IIb.18}$) i ($\ref{IIb.19}$) stosujemy przy możliwości wiarygodnego oszacowania korelacji mechanizmów zniszczenia i warunkowych prawdopodobieństw awarii ($\ref{IIb.22}$) i ($\ref{IIb.23}$).
Elementy stowarzyszone i systemy monotoniczneBarlow i Proschan (1974) [92] podają kilka ważnych oszacowań dla prawdopodobieństwa zniszczenia $p_f$ systemu złożonego. Do tego celu zdefiniowali zmienne stowarzyszone, czyli takie zmienne losowe $X_1, \dots X_n$ dla których zachodzi:
\begin{equation} Cov \{ \Theta(X_1,… X_n), \Psi (X_1,… X_n) \} \ge 0 \tag{IIb.27}\label{IIb.27}\end{equation}
gdzie $\Theta$ i $\Psi$ funkcje zmiennych losowych $X_1,… X_n$, stanowiących dowolne pary niemalejące ze względu na każdy z argumentów tych funkcji. Cov jest symbolem kowariancji.
z warunku ($\ref{IIb.27}$) wynika, że dwie zmienne losowe $X$ i $Y$ są stowarzyszone, jeśli są dodatnio skorelowane, to znaczy zwiększeniu wartości $X$ na ogół towarzyszy zwiększenie wartości $Y$:
\begin{equation} Cov \{ X,Y\} \ \ge 0 \tag{IIb.28}\label{IIb.28}\end{equation}
Dodatnia kowariancja jest warunkiem koniecznym, ale nie wystarczającym stowarzyszenia w sensie ($\ref{IIb.27}$). Natomiast dla zmiennych binarnych dodatnia kowariancja jest równoważna stowarzyszeniu w sensie Barlowa–Proschana,a dalej rozpatrujemy sytuacje, w których każda ze zmiennych $X_1,… X_n$ jest binarna, tzn przyjmuje wartość [1 = element struktury jest sprawny ; 0=element uszkodzony].
Wówczas do spełnienia warunku ($\ref{IIb.28}$) wystarcza, by funkcje $\Theta$ i $\Psi$ były binarne. W przypadku dwóch zmiennych binarnych to kryterium ($\ref{IIb.28}$) redukuje się do prostego warunku:
\begin{equation}Pr ( X=1\, , \, Y=1) \ge Pr (X=1) \cdot Pr (Y=1) \tag{IIb.29}\label{IIb.29}\end{equation}
Innymi słowy — zdarzenia „X=1” i „Y=1” występują razem częściej niż gdyby zmienne były niezależne”
Systemy spełniające warunek ($\ref{IIb.28}$) dla awarii dowolnych dwóch elementów lub ich zbioru (mechanizmu zniszczenia) nazywa się systemami monotonicznymi, to znaczy takimi, w których zwiększenie niezawodności jednego elementu powoduje zwiększenie niezawodności mechanizmu, w którym on uczestniczy, a w wyniku zwiększenie niezawodności całego systemu. To samo dotyczy zmniejszenia niezawodności. Z oszacowań podanych w rozdziale, wynika, że również zwiększanie korelacji pomiędzy elementami zwiększa niezawodność mechanizmu i całego systemu w klasie systemów monotonicznych o elementach stowarzyszonych (ale nie jest to bezwzględnie konieczne).
Dość oczywiste jest, że w konstrukcjach budowlanych elementy krytyczne (przekroje bądź elementy konstrukcyjne) są stowarzyszone, choć niekoniecznie muszą być losowo niezależne. Przykładem może być rama sprężysto-plastyczna, w której mogą być uruchomione mechanizmy plastyczne na skutek utworzenia się wymaganej liczby przegubów plastycznych, albo sprzężone systemy przekryć obiektów wskutek połączenia stężeniami konstrukcyjnymi.
Rozpatrujemy takie systemy, w których monotoniczne jest bezpieczeństwo i niezawodność.
Oszacowania niezawodności Barlow-Proschan (oBP)
Oszacowania niezawodności systemu podane przez Barlow i Proschan (1974) są oszacowaniami zależnymi od ilości posiadanych informacji. Ulepszanie oszacowań niezawodności systemu następuje wraz ze zwiększaniem się informacji o zachowaniu poszczególnych elementów systemu i o powiązaniach między elementami.
Pełną informację zawiera łączna funkcja gęstości rozkładu prawdopodobieństwa zmiennych podstawowych systemu. Takiej informacji na próżno oczekiwać. Najczęściej nie mamy wystarczających informacji statystycznych, by estymować (szacować) parametry rozkładów nawet na bardzo niewielkim poziomie wiarygodności. Posiadane, wiarygodne informacje pozwalają oszacować zwykle tylko kilka parametrów i to niektórych tylko rozkładów brzegowych. O niektóre parametrach wnioskujemy z natury zagadnienia, na przykład z centralnego twierdzenia granicznego oraz natury cech (np. nieujemności fizycznych wielkości sprawczych, wartości ekstremalnych , itd.).
Istnieją trzy typy oszacowań niezawodności zależne od posiadanych informacji o: 1) ścieżkach i cięciach systemu, 2) stowarzyszeniu , niezależności lub dowolnej korelacji elementów. dla poszczególnych sytuacji mamy oszacowania [98] prawdopodobieństwa niezawodności $r$:
W tym rozdziale stosuje się oznaczenia:
$ r= p_s= 1-p_f$,
$r_i = Pr (Z_i > 0)$ – niezawodność elementu
$r_s$ – niezawodność systemu
$S_j$ – j-ta ścieżka minimalna
$C_j$ – j-te cięcie minimalne
Oszacowania Barlow-Proschan (oBP) można zapisać jedną formułą
\begin{equation} oBP \text{-} L^- \le r_s \le oBP\text{-}L^+ \tag{IIb.30}\label{I3b.30}\end{equation}
gdzie: L jest poziomem posiadanych informacji:
A – nie są znane ścieżki minimalne i cięcia minimalne, elementy stowarzyszone,
B– znane są ścieżki minimalne i cięcia minimalne, elementy dowolnie zależne,
C– znane są ścieżki minimalne i cięcia minimalne, elementy stowarzyszone
Wraz ze zwiększającą się ilością informacji oszacowania dolne $oBP^-$ oraz górne $oBP^+$ zbliżają się do siebie, zawężając tolerancję i polepszając oszacowanie niezawodności.
\begin{equation} BP\text{-}A^- \le BP\text{-}B^- \le BP\text{-}C^- \le r_s \le BP\text{-}C^+ \le BP\text{-}B^+ \le BP\text{-}A^+ \tag{IIb.31}\label{IIb.31}\end{equation}
gdzie granice przedziałów $BP^{sign} \quad sign = {−,+} $ można oszacować z zależności:
\begin{equation} BP^{sign}= \begin{cases}
oBP\text{-}A^- = & \prod \limits_{i=1}^{n} r_i \\
oBP\text{-}A^+ = & \min \limits_{1 \le i \le n} r_i \\
oBP\text{-}B^- = &\max \limits_{1 \le j \le s} \Pr \left(\bigcap_\limits {i \in S_j} \{ Z_i > 0 \}\right)\\
oBP\text{-}B^+ = & \min \limits_{1 \le j \le c} \Pr \left( \bigcap \limits_{i \in C_j} \{ Z_i > 0 \}\right)\\
oBP\text{-}C^- =& \max \limits_{1 \le j \le s} \quad \prod_ \limits{i \in S_j} r_i\\
oBP\text{-}C^+ =& \min\limits _{1 \le j \le c} \quad \prod_ \limits{i \in C_j} r_i
\end{cases} \tag{IIb.32}\label{IIb.32}\end{equation}
W ujęciu Barlow–Proschan stowarzyszenie elementarnych zdarzeń daje największy zysk informacyjny bez wymagania pełnej gęstości.
W niniejszej pracy elementarnym zdarzeniom nadaje się sens fizyczny mechanizmów zniszczenia konstrukcji budowlanych.
Oszacowania Ditlevsen–Madsen (oDM-S) na poziomie ścieżek
Ditlevsen i Madsen (1996) [99] zaproponowali ostrzejsze oszacowania niezawodności systemu od oszacowań BP , wykorzystujące: znajomość minimalnych ścieżek lub cięć; prawdopodobieństwa zniszczenia poszczególnych mechanizmów oraz pary zdarzeń zniszczenia (korelacje na poziomie mechanizmów).
Niech zdarzenie $F_j = {\text{zniszczenie minimalnej ścieżki } S_j}$ zajdzie z prawdopodobieństwem $p_j = \Pr(F_j) = 1 – r_{S_j}$.
Wówczas dolne i górne oszacowanie Ditlevsen–Madsen (oDM-S) (na poziomie ścieżek) dla systemu równoległego zdarzeń $F_j$ można zapisać następująco:
\begin{equation} oDM-S^{sign} \begin{cases}
oDM\text{-} S^- \to & r_s \ge 1 – \sum_{j=1}^s p_j \\
oDM\text {-} S+ \to & r_s \le 1 – \max_{1 \le j \le s} p_j \\
oDM\text{-} S2^- \to & r_s \ge 1 – \sum_{j=1}^s p_j + \sum_{j<k} \Pr(F_j \cap F_k) \\
\end{cases} \tag{IIb.33}\label{IIb.33}\end{equation}
Oszacowanie oDM-S jest ostrzejsze od oBP-A, ale nie zawsze ostrzejsze od oBP-C, ponieważ wykorzystuje tylko informację o ścieżkach, bez jawnego uwzględnienia cięć jednoelementowych
Ditlevsen–Madsen zaproponowali ulepszenie dolnego oszacowanie typu Bonferroniego drugiego rzędu w postaci oDM-S2- . To ulepszone oszacowanie jest istotnie ostrzejsze od BP i w praktyce często zbliża się do rzeczywistej niezawodności systemu.
Porównanie oszacowań oBP i oDM
Metoda oBP wykorzystuje wyłącznie: informację strukturalną o systemie (minimalne ścieżki $S_j$, minimalne cięcia $C_j$); ewentualne założenie stowarzyszenia elementów; niezawodności elementów $r_i$. Nie wymaga: znajomości wspólnego rozkładu zmiennych losowych; znajomości korelacji liczbowyh; analizy interakcji pomiędzy zdarzeniami zniszczenia.
Metoda oDM wykorzystuje: minimalne ścieżki lub cięcia; prawdopodobieństwa zniszczenia mechanizmów $p_j$; informacje o wspólnych realizacjach zdarzeń $F_i \cap F_j$; (opcjonalnie) korelacje pomiędzy mechanizmami. Jest to metoda pośrednia pomiędzy oBP a pełnymi metodami probabilistycznymi (FORM/SORM).
W porównaniu z oszacowaniami Ditlevsena ($\ref{IIb.18}$) – ($\ref{IIb.19}$) opartymi na informacjach parowych i innymi podobnymi , które wymagają wyższych momentów funkcji granicznych, oszacowania BP-C oferują mniej restrykcyjne, logicznie uzasadnione granice niezawodności systemu bez silnych założeń rozkładowych. W przypadkach mechanizmów zniszczenia o wspólnych, monotonicznych zależnościach Oszacowanie oBP-C dostarcza bardziej informacyjnych, lecz nadal spójnych z fizyczną i inżynierską interpretacją ograniczeń niezawodności.
Modele binarne zależne – rozwinięcie Bahadura (oBH)
W rozwinięciu Bahadura (Bahadur, 1961) [100] rozkład łączny zmiennych binarnych wyraża się jako iloczyn rozkładów brzegowych skorygowany o składniki opisujące zależności między zmiennymi. W najprostszym i najczęściej stosowanym przybliżeniu drugiego rzędu uwzględnia się jedynie korelacje par zmiennych.
Dla dwóch zmiennych binarnych $I_i$ i $I_j$ wspólne prawdopodobieństwo ich wystąpienia można zapisać w postaci przybliżonej:
\begin{equation}\Pr(I_i=1, I_j=1) \approx p_i \cdot p_j + \rho_{ij} \cdot \sqrt{p_i\cdot ( 1 – p_i ) \cdot p_j\cdot ( 1- p_j)} \tag{IIb.34}\label{IIb.34}\end{equation}
gdzie $\rho_{ij} = \mathrm{Corr}(I_i,I_j)$ jest współczynnikiem korelacji zmiennych binarnych.
Zależność ta pokazuje, że wspólne prawdopodobieństwo dwóch mechanizmów składa się z części odpowiadającej niezależności oraz poprawka wynikającej z ich statystycznej zależności. Dla $\rho_{ij}=0$ otrzymujemy przypadek zmiennych niezależnych, natomiast dla $\rho_{ij}>0$ prawdopodobieństwo wspólne jest większe niż iloczyn prawdopodobieństw brzegowych.
Korelacja $\rho_{ij}$ w rozwinięciu Bahadura nie jest korelacją zmiennych podstawowych (obciążeń, nośności), lecz korelacją zdarzeń uruchomienia mechanizmów. Oznacza to, że mierzy ona skłonność do wspólnego występowania mechanizmów zniszczenia, niezależnie od ich fizycznych przyczyn. Takie ujęcie jest szczególnie przydatne w analizie systemów konstrukcyjnych.
Rozwinięcie Bahadura stanowi formalne uzasadnienie wielu inżynierskich oszacowań stosowanych w analizie niezawodności systemów złożonych, w szczególności oszacowań typu Cornell–Ditlevsen oraz relacji wykorzystujących prawdopodobieństwa warunkowe. Przybliżone wyrażenia na $p_{ij}$ stosowane w tych metodach można interpretować jako uproszczone postacie rozwinięcia Bahadura ograniczonego do składników drugiego rzędu.
W praktyce inżynierskiej uwzględnianie składników wyższych rzędów (trójek, czwórek zdarzeń) nie jest możliwe ze względu na brak danych i prowadziłoby do niestabilnych estymacji. Dlatego rozwinięcie Bahadura ogranicza się zazwyczaj do korelacji par mechanizmów.
W analizie niezawodności konstrukcji mechanizmy zniszczenia $Z_k$ są zdarzeniami systemowymi wynikającymi z przekroczenia odpowiednich funkcji granicznych. Zastosowanie rozwinięcia Bahadura umożliwia spójne przejście od opisu ciągłego (funkcje graniczne w przestrzeni losowej) do opisu binarnego (system niezawodnościowy).
W tym ujęciu:
- prawdopodobieństwa $p_k$ opisują częstość uruchomienia poszczególnych mechanizmów,
- korelacje $\rho_{ij}$ opisują zależności pomiędzy mechanizmami,
- oszacowania niezawodności systemu mogą być prowadzone bez znajomości pełnego rozkładu łącznego.
Rozwinięcie Bahadura ma charakter przybliżony i nie gwarantuje, że otrzymany rozkład łączny będzie dodatnio określony dla dowolnych wartości $p_i$ i $\rho_{ij}$. Z tego względu metoda ta powinna być traktowana jako narzędzie inżynierskie służące do oszacowań niezawodności, a nie jako ścisły model probbilistyczny.
Ograniczenie to nie stanowi istotnej wady w analizie konstrukcji budowlanych, ponieważ celem obliczeń jest oszacowanie ryzyka i porównanie wariantów projektowych, a nie pełna rekonstrukcja struktury losowej systemu.
Rozwinięcie Bahadura stanowi w ten sposób formalne uzasadnienie inżynierskich oszacowań typu ($\ref{IIb.21}$)–($\ref{IIb.22}$), stosowanych w analizach systemowych, oraz pozwala interpretować korelacje $\rho_{ij}$ bez konieczności znajomości pełnego rozkładu łącznego.
Takie ujęcie jest szczególnie przydatne w analizie systemów konstrukcyjnych, gdzie:
- mechanizmy zniszczenia często współwystępują,
- brak jest danych umożliwiających estymację pełnych rozkładów wielowymiarowych,
- dostępna jest jedynie wiedza o częstości awarii oraz ich współzależności.
W przedstawionym w III części pracy modelu dynamicznym rozwinięcie Bahadura pełni rolę łącznika pomiędzy:
- opisem systemu jako zbioru mechanizmów zniszczenia,
- oszacowaniami korelacji pomiędzy tymi mechanizmami,
- oraz analizą niezawodności systemu jako całości.
Umożliwia to budowę hybrydowego modelu binarno-ciągłego, w którym geometryczna analiza funkcji granicznych jest uzupełniona systemowym opisem zależności pomiędzy mechanizmami zniszczenia. W klasycznych zagadnieniach niezawodności systemów złożonych mechanizmy zniszczenia $Z_1,\dots,Z_n$ są zdarzeniami binarnymi. Każdy mechanizm może wystąpić albo nie wystąpić, co naturalnie prowadzi do opisu za pomocą zmiennych losowych binarnych:
\begin{equation}I_k = \begin{cases}
1 & \text{jeżeli mechanizm } Z_k \text{ został uruchomiony}\\
0 & \text{w przeciwnym przypadku}\\
\end{cases} \tag{IIb.35}\label{IIb.35}\end{equation}
Metoda uogólnionej korelacji
W pracy Kudzys (1985) [101] przedstawiono praktyczny, uproszczony sposób szacowania niezawodności systemu niezawodnościowego złożonego ze skorelowanych elementów. Wprowadzono pojęcie uogólnionego współczynnika korelacji, to znaczy takiego zastępczego (integralnego) współczynnika korelacji, który jeden ujmuje efekt wielu wzajemnych współczynników korelacji elementów. Uogólniony współczynnik korelacji $\rho_g$ można zapisać w postaci:
\begin{equation}\rho_g = \cfrac {\Delta P} {\Delta P_{max}} \tag{IIb.36}\label{IIb.36}\end{equation}
gdzie:
$\Delta P$ – poprawka oszacowania niezawodności, uwzględniająca błąd obliczeń, wskutek nie uwzględnienia korelacji (lub stochastycznej zależności) elementów,
$\Delta P_{max} $ – maksymalna wartość poprawka oszacowania niezawodności.
Niezawodność systemu złożonego z $r = n \cdot m$ elementów można obliczyć jak dla szeregowo połączonych wszystkich elementów z zależności ($\ref{IIb.3}$) , ale z poprawka $\Delta P$:
\begin{equation} p_s= \prod \limits_{i=1}^r p_{s,i} +\Delta P \tag{IIb.37}\label{IIb.37}\end{equation}
n – liczba elementów połączonych szeregowo,
m- liczba bloków po n-elementów połączonych równolegle,
$r=ncdot m$ – całkowita liczba elementów
$p_{s,i}$ – niezawodność elementu i-tego $(i = 1,.., r)$.
Maksymalny błąd obliczeń niezawodności systemu, w którym wytrzymałość i obciążenia są nieskorelowane, można oszacować z zależności [102]:
\begin{equation} \Delta P_{max} = \min \limits_{i=1}^ r p_{s,i} – \sum \limits_{i=1}^ r (1 – p_{s,i}) ] \tag{IIb.38}\label{IIb.38}\end{equation}
gdzie
$ \min \limits_{i=1}^ r p_{s,i}$ – minimalna niezawodność elementu spośród r elementów systemu.
Z ($\ref {IIb.38}$) otrzymujemy oszacowanie niezawodności systemu $p_s$ [101] :
\begin{equation} \prod \limits_{i=1}^r p_{s,i} \le p_s \le \prod \limits_{i=1}^r p_{s,i} + \min \limits_i p_{s,i} – [ 1- \sum\limits_{i=1}^r (1 – p_{s,i})]\tag{IIb.39}\label{IIb.39}\end{equation}
Z oszacowania ($\ref{IIb.39}$) wynika, że uogólniony współczynnik korelacji ($\ref{IIb.36}$) można wyznaczyć z formuły:
\begin{equation} \rho_g =\cfrac {\Delta P} { \min\limits_i p_{s,i} – [1-\sum\limits_{i=1}^r (1-p_{s,i})]}\tag{IIb.40}\label{IIb.40}\end{equation}
przy czym można zastosować przybliżenie, wynikające z odwrócenia ($\ref {IIb.9}$):
\begin{equation} \rho _g \approx \cfrac {1} { 1 – \sum \limits_{i=1}^r (1-p_{si})} \approx \prod \limits_{i=1}^r p_{s,i} \tag{IIb.41}\label{IIb.41}\end{equation}
Przybliżenie ($\ref{IIb.41}$) ma charakter czysto inżynierski i jest uzasadnione wyłącznie dla systemów o wysokiej niezawodności elementów.
Po podstawieniu $\Delta P$ uzyskanego z ($\ref{IIb.37}$) do ($\ref{IIb.40}$), uzyskujemy podstawowe wyrażenie metody uogólnionej korelacji, do oszacowania niezawodności systemu złożonego z dowolnych elementów powiązanych w strukturę mieszaną:
\begin{equation} p_s \approx \rho_g \cdot \min\limits_i p_{s,i} + (1-\rho_g )\left [1- \prod\limits_{i=1}^r (1-p_{s,i})\right ] \tag{IIb.42}\label{IIb.42}\end{equation}
Podstawowym problemem metody uogólnionej korelacji jest wyznaczenie współczynnika $\rho_g $ ($\ref{IIb.36}$). Dla normalnie rozłożonych funkcji granicznych $g_i()$, miarodajną wartość uogólnionego współczynnika korelacji sytemu można wyznaczyć z formuły [101] :
\begin{equation} \rho_g \approx \ \overline {\rho}_g \left \{ 2 – \left [ \overline\rho_g + \cfrac {(1-\overline \rho_g) \cdot (3-log \, n)} {1-0,1 {\rho^2}_m \cdot (3 – log\, n)^2 } \right] \right \}\tag{IIb.43}\label{IIb.43}\end{equation}
gdzie:
\begin{equation} \overline {\rho}_g= \cfrac {2}{n \cdot (n-1)} \sum\limits_{i<j} \rho_{i,j} \tag{IIb.44}\label{IIb.44}\end{equation}
jest średnią wartością współczynników korelacji wzajemnej $\rho_{i,j}$ elementu (i) z (j), uzyskaną przez uśrednianie po wszystkich r – elementach systemu, w ogólności skorelowanych, czyli statystycznie lub funkcjonalnie zależnych.
Do liczby elementów $r$ wliczany jest każdy blok (podsystem), który jest rozpatrywany jako samoistny element systemu włączając w to elementy połączeń oraz stężenia konstrukcji.
W pracy [101] sprawdzono dokładność formuły $(\ref{IIb.43})$ przez porównanie z wynikami dokładnymi uzyskanymi przez całkowanie gęstości prawdopodobieństwa i stwierdzono, że dokładność metody uogólnionej korelacji jest zadawalająca, dla liczby zdarzeń (elementów konstrukcji) $(r< 500)$ .
Konkluzja rozdziału – rola oszacowań systemowych
Wszystkie przedstawione w niniejszym rozdziale metody oszacowań niezawodności systemu – od klasycznych oszacowań Cornella–Barlowa–Proschana, poprzez oszacowania Ditlevsena i Ditlevsena–Madsena, aż po modele binarne oparte na rozwinięciu Bahadura oraz metodę uogólnionej korelacji – opisują niezawodność konstrukcji na poziomie zdarzeń binarnych oraz zależności statystycznych pomiędzy tymi zdarzeniami. Wspólną cechą tych metod jest rezygnacja z pełnego opisu rozkładu łącznego zmiennych losowych na rzecz informacji ograniczonej: niezawodności elementów, struktur systemu (ścieżki i cięcia), korelacji parowych lub ich uogólnionych miar.
Takie podejście odpowiada rzeczywistym możliwościom praktyki inżynierskiej, w której pełna identyfikacja wielowymiarowych rozkładów losowych jest zazwyczaj niemożliwa, natomiast dostępna jest wiedza o mechanizmach zniszczenia, ich częstości oraz współwystępowaniu. Metody oszacowań systemowych tworzą w tym sensie hierarchię informacyjną, w której dokładność oceny niezawodności rośnie wraz z ilością i jakością dostępnych informacji, przy zachowaniu kontroli nad bezpieczeństwem obliczeń.
W dalszej części pracy mechanizmy zniszczenia $Z_k$ będą interpretowane jako realizacje funkcji granicznych $g(\mathbf{X}(t), zdefiniowanych w przestrzeni losowej zmiennych podstawowych i – w ujęciu dynamicznym – w czasie. Niezawodność systemu nie będzie już opisywana wyłącznie jako kombinacja zdarzeń binarnych, lecz jako własność składanej powierzchni stanu, będącej obwiednią zbioru powierzchni granicznych odpowiadających poszczególnym mechanizmom zniszczenia.
Takie ujęcie umożliwia naturalne połączenie klasycznej teorii systemów niezawodnościowych z geometryczną analizą przestrzeni losowej, charakterystyczną dla metod FORM/SORM, a jednocześnie pozwala na zachowanie systemowej interpretacji mechanizmów zniszczenia. W szczególności otwiera to drogę do wprowadzenia wag mechanizmów zniszczenia, opartych nie tylko na częstości ich realizacji, lecz również na konsekwencjach strukturalnych, funkcjonalnych i eksploatacyjnych ich wystąpienia.
W rezultacie przedstawione w niniejszym rozdziale oszacowania należy traktować nie jako konkurencyjne wobec metod geometrycznych, lecz jako ich naturalne uzupełnienie i statyczny limit, stanowiący punkt wyjścia do dalszego, bardziej ogólnego opisu niezawodności konstrukcji w ujęciu binarno-ciągłym i dynamicznym.
Część IIc: Niezawodność z warunku użytkowalności
Wprowadzenie
Zestawienie docelowych poziomów niezawodności dla różnych kategorii stanów granicznych, przedstawione w tab. 12, jednoznacznie wskazuje, że stany graniczne użytkowalności (SGU) zajmują w systemie bezpieczeństwa konstrukcji pozycję odrębną od stanów granicznych nośności, lecz w żadnym razie nie drugorzędną.
Każdy stan graniczny, niezależnie od jego klasyfikacji normowej, generuje bowiem określone skutki materialne, funkcjonalne i eksploatacyjne, których znaczenie ujawnia się często w długim horyzoncie czasu.
Z tego względu racjonalną miarą bezpieczeństwa konstrukcji nie jest pojedynczy współczynnik niezawodności β, lecz oczekiwane ryzyko, rozumiane jako iloczyn prawdopodobieństwa przekroczenia danego stanu granicznego oraz skutków tego przekroczenia. Tymczasem normy Eurokod nie definiują jawnej miary niezawodności β dla żadnego ze stanów granicznych użytkowalności. Ich nieprzekroczenie regulowane jest pośrednio, poprzez kombinacje oddziaływań, współczynniki redukcyjne Ψ oraz graniczne wartości parametrów użytkowych (np. ugięć, przemieszczeń czy drgań). Granice te nie mogą być jednoznacznie określone normowo, ponieważ zależą od wielu czynników funkcjonalnych, technologicznych i eksploatacyjnych, w większości niezwiązanych bezpośrednio z samą konstrukcją nośną, lecz z elementami i urządzeniami budowlanymi współpracującymi z konstrukcją. Z tego powodu decyzja o dopuszczalnych ugięciach, przemieszczeniach czy poziomach drgań delegowana jest na projektanta, który zna konkretne uwarunkowania użytkowe i technologiczne obiektu. Dotyczy to m.in. wpływu ugięć stropów na pękanie ścian murowanych (zależnego od technologii ich wykonania, np. zbrojenia), czy dopuszczalnych różnic przemieszczeń podpór urządzeń takich jak wagi, dźwignice lub instalacje technologiczne.
Szczególnie wyraźnie znaczenie stanów granicznych użytkowalności ujawnia się w konstrukcjach żelbetowych, gdzie oddziaływania długotrwałe, pełzanie, skurcz oraz proces zarysowania prowadzą do silnie zależnej od czasu degradacji parametrów użytkowych. Jak wskazano w pracach Way’a oraz Holický’ego [103], nieuwzględnienie probabilistycznego charakteru tych zjawisk prowadzi do systematycznego niedoszacowania ryzyka użytkowego, mimo formalnego spełnienia warunków normowych.
Problem niespójności normowego podejścia do niezawodności z warunku użytkowalności został jednoznacznie zidentyfikowany przez Dániel Honfi (2013), który stwierdził, że podejście Eurokodów do SGU wymaga kalibracji właściwych limitów ugięcia oraz powiązania ich z odpowiadającymi im granicznymi częściowymi współczynnikami bezpieczeństwa [104]. Honfi podjął próbę oszacowania zależnej od czasu niezawodności użytkowej belek drewnianych z wykorzystaniem symulacji Monte Carlo. Zaproponowane podejście tworzy ramy do probabilistycznej kalibracji limitów ugięcia, współczynników obciążenia oraz współczynników pełzania, przy jednoczesnym uwzględnieniu niepewności we wszystkich istotnych aspektach użytkowalności konstrukcji.
W konstrukcjach zespolonych stal–beton oraz w konstrukcjach kompozytowych stany graniczne użytkowalności mają charakter dominujący i silnie zależny od czasu, ponieważ są kontrolowane przez pełzanie, skurcz, relaksację połączeń oraz degradację sztywności materiałów. Badania wykazały, że długookresowe ugięcia i przemieszczenia takich konstrukcji mogą znacząco odbiegać od prognoz deterministycznych, mimo formalnego spełnienia wymagań normowych [105].
Jeszcze bardziej wyraźnie rola SGU ujawnia się w konstrukcjach hydrotechnicznych, w szczególności w zaporach wodnych. W tego typu obiektach długookresowe przemieszczenia, zarysowanie betonu oraz zmiany warunków filtracji mają charakter kumulatywny i mogą prowadzić do stopniowej utraty bezpieczeństwa globalnego. Klasyczne prace wykazały, że przekroczenie stanów użytkowalności w zaporach jest często pierwszym sygnałem procesów degradacyjnych poprzedzających awarie o charakterze katastrofalnym [106]. Z tego względu w analizie zapór użytkowalność i czas stanowią integralny element oceny niezawodności.
Analogiczne wnioski dotyczą konstrukcji offshore, takich jak platformy wiertnicze i morskie konstrukcje wsporcze. W obiektach tych stany graniczne użytkowalności, związane z ugięciami, drganiami, zmęczeniem i kumulacją uszkodzeń, decydują o ciągłości eksploatacji oraz bezpieczeństwie systemów technologicznych. Jak wskazano w klasycznych opracowaniach DNV, użytkowalność i zmęczenie w środowisku morskim stanowią kluczowe kryteria projektowe, a ich przekroczenie często poprzedza utratę nośności elementów konstrukcyjnych [107].
Szczególną kategorię obiektów, w których znaczenie SGU jest często niedoszacowane, stanowią konstrukcje podziemne i geotechniczne, takie jak tunele, obiekty metra, płyty fundamentowe parkingów podziemnych oraz konstrukcje oporowe. W tego typu obiektach przekroczenie stanów granicznych użytkowalności objawia się w postaci nadmiernych osiadań, przemieszczeń poziomych i zarysowań, które – mimo braku przekroczenia nośności – mogą prowadzić do poważnych szkód w zabudowie nadziemnej. Przykładem są uszkodzenia budynków zlokalizowanych nad tunelami komunikacyjnymi, obserwowane m.in. w trakcie realizacji inwestycji metra, gdzie spełnienie warunków nośności nie zapobiegło pękaniu konstrukcji istniejących obiektów. Klasyczne opracowania geotechniczne jednoznacznie wskazują, że w takich przypadkach to SGU, a nie SGN, stanowią kryterium decydujące o dopuszczalności rozwiązań projektowych [108].
W odniesieniu do płyt fundamentowych parkingów podziemnych oraz innych obiektów masywnych dominującą rolę odgrywają różnice osiadań, długookresowe przemieszczenia i zarysowanie betonu, które bezpośrednio wpływają na funkcjonalność obiektu oraz trwałość elementów wykończeniowych i instalacyjnych. W konsekwencji w szerokiej klasie konstrukcji zespolonych, kompozytowych, hydrotechnicznych, offshore i geotechnicznych stany graniczne użytkowalności stanowią główny czynnik ryzyka eksploatacyjnego, a ich ocena wymaga podejścia uwzględniającego niepewności materiałowe i eksploatacyjne oraz czas jako podstawowy wymiar niezawodności.
Propozycje granicznych wartości ugięć
W tab. IIc-1 zestawiono propozycje wartości granicznych ugięć dla różnych elementów budowlanych, wykonanych z różnych materiałów i wg różnych źródeł literaturowych w tym norm z różnych krajów.
Tab. IIc-1 Propozycje granicznych ugięć dla różnych konstrukcji wg różnych źródeł
\[ \begin{array}{|c|p{3.6cm}|c|c|c|p{3.0cm}|}
\hline \textbf{Lp.} & \textbf{Rodzaj konstrukcji} & \textbf{Ugięcie chwilowe} & \textbf{Ugięcie częste} & \textbf{Ugięcie prawie stałe} &\textbf{Źródła (skrót)} \\
\hline 1 & \text{Żelbet – belki, stropy (budynki)} & L/200 \div L/250 & L/250 \div L/300 & L/300 \div L/500 & \text{EC2, ACI, JIS} \\
\hline 2 & \text{Stal – belki, rygle} & L/200 \div L/350 & L/250 \div L/400 & L/200 \div L/350 & \text{EC3, AISC, BS} \\
\hline 3 & \text{Zespolone stal–beton} & L/250 & L/300 & L/300 \div L/500 &\text{EC4, LIT-ZESP} \\
\hline 4 & \text{Drewno – belki, stropy} & L/300 & L/300 \div L/350 & L/200 \div L/250 & \text{EC5, AS-TIM, JIS} \\
\hline 5 & \text{Kompozytowe FRP} & L/350 \div L/500 & L/400 \div L/500 & (P) & \text{CEN/TS, LIT-FRP} \\
\hline 6 & \text{Zapory wodne} & (P) & (P) & (P) & \text{ICOLD} \\
\hline 7 & \text{Offshore – platformy} & L/200 \div L/350 & Drgania & Zmęczenie & \text{DNV} \\
\hline 8 & \text{Tunele, metro} & (P) & (P) & (P) & \text{PECK, NAT-TUN} \\
\hline 9 & \text{Płyty fundamentowe, parkingi podziemne} & (P) & (P) & (P) & \text{EC7, LIT-GEO} \\
\hline\end{array} \]
Uwagi do tabeli:
1)
- L oznacza rozpiętość obliczeniową elementu; w normach krajowych jego definicja może się różnić.
- Symbol (P) oznacza, że wartość graniczna jest dobierana projektowo, w zależności od funkcji obiektu, wrażliwości elementów współpracujących oraz akceptowalnego poziomu ryzyka użytkowego,
- W konstrukcjach żelbetowych, zespolonych, drewnianych i kompozytowych ugięcie prawie stałe uwzględnia efekty pełzania, skurczu, relaksacji oraz degradacji właściwości materiałowych i jest silnie zależne od czasu oddziaływania obciążeń,
- Ugięcie częste odpowiada kombinacjom częstym oddziaływań i ma szczególne znaczenie dla oceny pękania elementów wykończeniowych, ścian działowych oraz poprawnej pracy urządzeń i instalacji,
- W konstrukcjach masywnych i geotechnicznych (zapory, tunele, płyty fundamentowe) ugięcie względne L/x nie jest miarodajne; stosuje się przemieszczenia (a nie ugiecia), różnice osiadań, kryteria zarysowania oraz monitoring w czasie eksploatacji i napraw
- Dla konstrukcji offshore decydującą rolę odgrywają drgania, zmęczenie i akumulacja uszkodzeń, a stany graniczne użytkowalności mają charakter dynamiczny i długookresowy.
2) Źródła normowe i literaturowe (wydania oryginalne + polskie tłumaczenia):
ACI [109], AISC [110], AS-TIM [111], BS [112], CEN/TS [113], DNV [114], EC2-EN [115], [116], EC2-EN-2G [117], [118], EC3-EN [119], [120], EC3-EN-2G [121], [122], EC4-EN [123], [124], EC5-EN [125], [126], EC5-EN-2G [127], [128], EC7-EN [129], [130], EC7-EN-2G [131], [132], ICOLD [133], JIS [134], LIT-FRP [135], [136], [137], [138], LIT-GEO [139], [140], [141], [142], LIT-ZESP [143], [144], NAT-TUN [145]
Ryzyko i koszty stanów granicznych użytkowalności i nośności – ujęcie zintegrowane
W klasycznym podejściu do niezawodności konstrukcji stany graniczne użytkowalności (SGU) traktuje się jako stany „podrzędne ” do stanów granicznych nośności (SGN), przypisując tym drugim przypisuje się zasadnicze znaczenie bezpieczeństwa, a pierwszym znaczenie funkcjonalne lub komfortowe. Podział ten, choć użyteczny normowo, nie odzwierciedla wprost rzeczywistej struktury ryzyka i kosztów, jakie generuje konstrukcja w całym okresie użytkowania.
Z punktu widzenia analizy ryzyka każdy stan graniczny jest zdarzeniem losowym, które posiada określone prawdopodobieństwo wystąpienia, generuje określone skutki materialne, funkcjonalne lub społeczne oraz wpływa na dalszą eksploatację konstrukcji. W tym sensie SGU i SGN różnią się nie istotą, lecz charakterem i skalą skutków, a nie samą naturą zjawiska.
Stany graniczne nośności są zdarzeniami o bardzo niskim prawdopodobieństwie, lecz o bardzo wysokich konsekwencjach jednostkowych. Ich wystąpienie prowadzi do utraty zdolności przenoszenia obciążeń, a często także do zagrożenia życia, co powoduje, że koszt awarii ma charakter skokowy, w dużej mierze nieodwracalny i dominuje w analizie krótkoterminowej. Z tego względu ryzyko SGN bywa traktowane jako ryzyko krytyczne, a jego redukcja realizowana jest głównie poprzez zwiększanie zapasów bezpieczeństwa konstrukcyjnego. Jednocześnie w typowych obiektach budowlanych prawdopodobieństwo przekroczenia SGN w całym okresie użytkowania jest ekstremalnie małe, co oznacza, że oczekiwany koszt SGN, mimo bardzo dużej wartości jednostkowej, może mieć ograniczony udział w całkowitym bilansie ekonomicznym.
W przeciwieństwie do SGN, stany graniczne użytkowalności są zdarzeniami znacznie częstszymi, często powtarzalnymi i w wielu przypadkach częściowo lub całkowicie odwracalnymi. Ich skutki rzadko mają charakter katastrofalny, lecz obejmują koszty napraw i wzmocnień, koszty przestojów w użytkowaniu, koszty interwencji eksploatacyjnych, szkody wtórne w elementach niekonstrukcyjnych oraz stopniową degradację trwałości i estetyki obiektu. Z punktu widzenia ryzyka ekonomicznego kluczowe znaczenie ma fakt, że SGU mogą występować wielokrotnie w czasie, a ich skumulowany koszt może w cyklu życia konstrukcji znacząco przewyższać oczekiwany koszt zdarzeń SGN. Pominięcie SGU w analizie ryzyka prowadzi zatem do systematycznego niedoszacowania rzeczywistych kosztów użytkowania obiektu.
Dla pełnej oceny ryzyka konieczne jest rozróżnienie stanów granicznych użytkowalności na odwracalne i nieodwracalne. Do SGU odwracalnych zalicza się takie przekroczenia parametrów użytkowych, które nie powodują trwałej degradacji konstrukcji, a ich skutki mogą zostać usunięte poprzez działania eksploatacyjne lub organizacyjne, takie jak przeglądy, interwencje techniczne czy ograniczenia użytkowe. Przykładami są nadmierne ugięcia występujące jedynie w okresach ekstremalnych oddziaływań, przekroczenia obciążeń śniegiem usuwane przez odśnieżanie dachu, czasowe przekroczenia dopuszczalnych drgań lub przemieszczeń. W tym przypadku ryzyko użytkowe jest związane głównie z częstotliwością występowania zdarzeń oraz kosztem pojedynczej interwencji.
Odmienny charakter mają SGU nieodwracalne, których przekroczenie prowadzi do trwałych skutków dla konstrukcji lub obiektu. Należą do nich między innymi zarysowanie betonu prowadzące do przyspieszonej korozji zbrojenia, trwałe różnice osiadań, uszkodzenia elementów wykończeniowych wymagające kosztownych napraw lub utrata szczelności i trwałości obiektów masywnych. W takich przypadkach SGU pełni rolę zdarzenia inicjującego proces degradacji, a koszt jego przekroczenia ma charakter narastający w czasie, obejmując nie tylko koszt bezpośredniej naprawy, lecz także wzrost prawdopodobieństwa kolejnych zdarzeń niepożądanych, w tym również stanów granicznych nośności. Oznacza to, że SGU i SGN nie są zdarzeniami niezależnymi, lecz elementami jednego, powiązanego procesu degradacji konstrukcji.
Jeżeli zrezygnuje się z normowego podziału na stany graniczne o różnej „wadze” i skupi się na naturze zjawisk oraz ich rzeczywistych skutkach, wówczas zarówno SGU, jak i SGN mogą być opisane w ramach jednej miary ryzyka $R = \sum_i p_i C_i$ , gdzie $p_i$ oznacza prawdopodobieństwo przekroczenia danego stanu granicznego, a $C_i$ koszt jego skutków rozumiany szeroko jako koszt ekonomiczny, funkcjonalny i społeczny. W takim ujęciu całkowity oczekiwany koszt konstrukcji w cyklu życia obejmuje koszt początkowy realizacji, koszty związane z przekroczeniami SGU (zarówno odwracalnymi, jak i nieodwracalnymi) oraz koszty związane z przekroczeniem SGN.
Z punktu widzenia decyzji projektowych optymalny projekt konstrukcji nie musi minimalizować prawdopodobieństwa każdego zdarzenia z osobna, lecz powinien minimalizować oczekiwany koszt całkowity. Oznacza to, że decyzja projektowa przestaje być pytaniem o formalną zgodność z normą, a staje się pytaniem o strategię zarządzania ryzykiem w całym cyklu życia obiektu. W praktyce sprowadza się to do wyboru pomiędzy rozwiązaniami o wyższym koszcie początkowym i mniejszym prawdopodobieństwie przekroczeń SGU oraz rozwiązaniami tańszymi, lecz wymagającymi częstszych przeglądów, interwencji i napraw. Klasycznym przykładem jest porównanie dachu zaprojektowanego na obciążenie śniegiem istotnie większe od wartości normowych z dachem spełniającym minimum projektowe, ale wymagającym regularnego odśnieżania.
Zintegrowane ujęcie SGU i SGN w jednym modelu ryzyka pokazuje, że są one różnymi przejawami tego samego zjawiska losowego, jakim jest ograniczona zdolność konstrukcji do spełniania swoich funkcji w czasie. Ich rozdzielenie ma sens normowy i organizacyjny, lecz nie powinno determinować analizy decyzyjnej. Dopiero wspólne ujęcie ryzyka i kosztów związanych z SGU i SGN pozwala na racjonalną ocenę niezawodności konstrukcji oraz świadome kształtowanie poziomu bezpieczeństwa i użytkowalności w całym okresie użytkowania.
Ryzyko i koszty SGU i SGN w ujęciu zintegrowanym – teoria decyzji, łańcuch zdarzeń
Współczesna teoria niezawodności konstrukcji wywodzi się z probabilistycznego opisu ryzyka zaproponowanego przez Cornella [146] wprowadza pojęcie użyteczności i oczekiwanej straty, wskazując, że racjonalne decyzje powinny minimalizować wartość oczekiwaną strat, a nie eliminować każde ryzyko bez względu na koszt.
Połączenie tych dwóch nurtów prowadzi do ogólnego opisu ryzyka $R$ w postaci
\begin{equation} R = \mathbb{E} [L] =\sum \limits_i p_i \cdot C_i \tag{IIc.1}\label{IIc.1}\end{equation}
gdzie:
$L$ – zmienna losowa „Straty”,
$p_i$ oznacza prawdopodobieństwo zdarzenia staty „i-tej”,
$C_i$ jego konsekwencje rozumiane jako straty materialne, funkcjonalne, społeczne lub ekonomiczne.
W tym sensie stany graniczne użytkowalności i nośności nie są kategoriami jakościowo odmiennymi, lecz różnymi zdarzeniami w tym samym zbiorze możliwych realizacji losowych.
Z perspektywy tej teorii zasadniczym błędem byłoby analizowanie wyłącznie stanów granicznych nośności. SGN są zdarzeniami rzadkimi, o bardzo wysokich konsekwencjach jednostkowych, natomiast SGU są zdarzeniami częstymi, często powtarzalnymi, o mniejszych, lecz kumulujących się skutkach. W cyklu życia konstrukcji suma strat związanych z SGU może przewyższać oczekiwane straty związane z SGN, mimo że te drugie mają charakter katastrofalny. Pominięcie SGU w analizie ryzyka oznacza zatem naruszenie podstawowej zasady teorii Cornella i von Neumanna–Morgensterna, zgodnie z którą wszystkie istotne zdarzenia losowe powinny być uwzględnione w funkcji celu.
Istotnym elementem tej analizy jest fakt, że SGU i SGN są często powiązane w postaci łańcucha zdarzeń. Przekroczenie stanu granicznego użytkowalności nieodwracalnego może inicjować proces degradacji, który zwiększa prawdopodobieństwo późniejszego przekroczenia stanu granicznego nośności. Formalnie można to opisać jako sekwencję zdarzeń
\begin{equation} E_1 \to E_2 \to \dots \rightarrow E_n \tag{IIc.2}\label{IIc.2}\end{equation}
gdzie $E_1$ odpowiada przekroczeniu SGU, a $E_n$ – SGN. Całkowite ryzyko takiego łańcucha nie jest sumą ryzyk niezależnych, lecz wynika z prawdopodobieństw warunkowych $p(E_n) = p(E_n|E_{n-1}) \cdot \dots \cdot p(E_2|E_1) \cdot p(E_1)$. W tym ujęciu SGU pełnią rolę zdarzeń inicjujących, a ich pominięcie prowadzi do systematycznego zaniżenia oceny ryzyka globalnego.
Rozróżnienie SGU na odwracalne i nieodwracalne ma w tym kontekście fundamentalne znaczenie. SGU odwracalne prowadzą do strat operacyjnych, które można modelować jako proces losowy w czasie, np.
\begin{equation}C_{\mathrm{SGU,odw}} = \sum_{k=1}^{N(T)} C_k \tag{IIc.3}\label{IIc.3}\end{equation}
gdzie:
$N(T)$ jest liczbą interwencji w okresie $T$,
$C_k$ kosztem pojedynczej interwencji.
SGU nieodwracalne prowadzą natomiast do trwałej zmiany stanu konstrukcji i wzrostu przyszłego ryzyka, co oznacza, że ich koszt nie kończy się na jednorazowej naprawie, lecz wpływa na cały dalszy przebieg eksploatacji.
Strategia odśnieżania dachu obiektu wielkopowierzchniowego
Rozważany jest obiekt budowlany z dachem płaskim lub o małym nachyleniu, eksploatowany w warunkach klimatycznych charakterystycznych dla Polski, w okresie projektowym $T$ lat. Analizowane są dwa warianty projektowo-eksploatacyjne, różniące się strategią zarządzania ryzykiem związanym z obciążeniem śniegiem.
Wariant A polega na zwiększeniu nośności i sztywności dachu poprzez przyjęcie obciążenia śniegiem większego od wartości referencyjnej, co powoduje wzrost kosztu początkowego inwestycji $\Delta C_0$, lecz redukuje częstość przekroczeń stanów granicznych użytkowalności oraz potrzebę interwencji eksploatacyjnych.
Wariant B polega na zaprojektowaniu dachu zgodnie z minimalnymi wymaganiami projektowymi, przy jednoczesnym przyjęciu strategii monitoringu i interwencyjnego odśnieżania w przypadku wystąpienia niekorzystnych warunków śniegowych.
W wariancie A projektant zwiększa nośność i sztywność dachu, przyjmując obciążenie śniegiem wyższe o około 20% od wartości normowej. Powoduje to wzrost kosztu początkowego $\Delta C_0$,ale znacząco redukuje prawdopodobieństwo przekroczenia SGU (ugięcia, zarysowania, nieszczelności) oraz zmniejsza potrzebę interwencji eksploatacyjnych. W wariancie drugim dach projektowany jest zgodnie z minimalnymi wymaganiami, natomiast strategia bezpieczeństwa opiera się na regularnym monitoringu i odśnieżaniu. W wariancie B ryzyko użytkowe ma postać procesu powtarzalnego. W każdym sezonie zimowym istnieje prawdopodobieństwo $p_s$ wystąpienia sytuacji wymagającej interwencji, a koszt pojedynczej akcji odśnieżania wynosi $C_s$.
Całkowity oczekiwany koszt wariantu A w okresie $T$ lat można zapisać w postaci
\begin{equation} \mathbb{E}[C_A] = C_0 + \Delta C_0 + \mathbb{E}[C_{\mathrm{SGU},A}] + \mathbb{E}[C_{\mathrm{SGN},A}] \tag{IIc.4}\label{IIc.4}\end{equation}
gdzie $C_0$ oznacza koszt bazowy realizacji obiektu, $\mathbb{E}[C_{\mathrm{SGU},A}]$ oczekiwany koszt przekroczeń stanów granicznych użytkowalności w wariancie A, a $\mathbb{E}[C_{\mathrm{SGN},A}]$ oczekiwany koszt zdarzeń nośnościowych.
Analogicznie całkowity oczekiwany koszt wariantu B można zapisać jako
\begin{equation} \mathbb{E}[C_B] = C_0 + \mathbb{E}[C_{\mathrm{śnieg}}] + \mathbb{E}[C_{\mathrm{SGU},B}] + \mathbb{E}[C_{\mathrm{SGN},B}] \tag{IIc.5}\label{IIc.5}\end{equation}
W powyższych zależnościach występują:
koszt interwencji odśnieżania
\begin{equation}\mathbb{E}[C_{\mathrm{śnieg}}]= T \cdot p_s \cdot C_s \tag{IIc.6}\label{IIc.6}\end{equation}
oraz koszt ryzyka organizacyjnego
\begin{equation}\mathbb{E}[C_{\mathrm{org}}]= T \cdot p_o \cdot C_o \tag{IIc.7}\label{IIc.7}\end{equation}
Z punktu widzenia teorii decyzji von Neumanna–Morgensterna [147] racjonalny wybór pomiędzy tymi wariantami polega na porównaniu ich oczekiwanych strat całkowitych, a nie na mechanicznym spełnieniu jednego kryterium normowego, a racjonalny wybór strategii projektowo-eksploatacyjnej polega na minimalizacji oczekiwanego kosztu całkowitego. Oba stany graniczne: użytkowalności i nośności są elementami jednego zagadnienia decyzyjnego. Norma może dostarczać wartości orientacyjnych, lecz nie powinna zastępować analizy ryzyka. Decydujące znaczenie ma natura zjawiska, jego częstość, odwracalność skutków oraz rzeczywiste koszty, jakie generuje w całym cyklu życia konstrukcji. Dopiero takie ujęcie pozwala mówić o racjonalnym, inżynierskim poziomie niezawodności, niezależnym od formalnego podziału na SGU i SGN. Proces konieczności odśnieżania modelowany jest jako proces losowy w czasie.
Możliwe jest zaakceptowanie wyższego koszt początkowego (inwestycyjnego) w zamian za niższe ryzyko użytkowe, lub niższego kosztu inwestycyjnego kosztem wyższego ryzyka i większych kosztów eksploatacyjnych (operacyjnych) . Każde z tych rozwiązań oże być racjonalne, lecz tylko analiza probabilistyczno-ekonomiczna pozwala wskazać optymalny wariant.
Przy założeniu obciążenia charakterystycznego gruntu w poszczególnych strefach śniegowych w Polsce jak w kolumnie 2. tabeli IIc-2 grubość krytyczna śniegu $s_{cr}$, przy której wymagane jest odśnieżanie płaskiego dachu wyznaczona z zależności
\begin{equation} h_{cr} = \cfrac{S_k \cdot \mu \cdot \gamma_f \cdot eta }{\gamma_{śnieg}} = \cfrac{S_k \cdot 0,8 \cdot 1,5 \cdot 0,7}{1,5} = 0,56 S_k\tag{IIc.8}\label{IIc.8}\end{equation}
gdzie:
$S_k$ – obciążenie charakterystyczne śniegu w zależności od strefy obciążenia śniegiem i przyjętego obciążenia wg kolumny 2 tabeli IIc-2
$\mu=0,8$ współczynnik kształtu dla płaskiego dachu,
$\gamma_f=1,5$ – współczynnik obciążenia śniegiem do porównania z rzetelnie pomierzoną w naturze rzeczywistą grubością pokrywy śniegu.
$\eta =0,7 $ współczynnik redukcyjny, uwzględniający niepewność oszacowania ciężaru śniegu oraz nierównomierny rozkład śniegu na dachu i jego wpływa na wytężenia konstrukcji
$ \gamma_{śnieg} = \cfrac{1+2}{2} = 1,5 \, kN/m^3$ – średni ciężar śniegu (1 kN/m3 – śnieg suchy , 3 kN/m3 – śnieg bardzo mokry)
W przypadkach wątpliwych, gdy ocena wizualna wskazuje na inny rodzaj śniegu niż wyżej założony należy oznaczyć ciężar śniegu poprzez pobranie w trzech miejscach próbki o objętości (1l=1 dm3) i zważenie oszacowanie rzeczywistego ciężaru śniegu oraz skorygowanie $h_{cr}$ $(\ref{IIc.8}$) i tab. IIc- 2.
Tab. IIc-2 Krytyczne grubości hcr pokrywy śnieżnej generujące incydent odśnieżania dachu
\[ \begin{array}{|c|c|c|c|}
\hline \textbf{Strefa śniegowa} & S_k\ [\mathrm{kN/m^2}] & \gamma_{\mathrm{śnieg}}\ [\mathrm{kN/m^3}] & h_{\mathrm{cr}}\ [\mathrm{cm}] \\
\hline I & 0.7 & 1.5 & \approx 39 \\
II & 0.9 & 1.5 & \approx 50 \\
III & 1.2 & 1.5 & \approx 67 \\
IV & 1.6 &1.5 &\approx 90 \\
\hline \end{array}\]
W każdym sezonie zimowym istnieje prawdopodobieństwo $p_s$ wystąpienia sytuacji wymagającej interwencji, które oznacza prawdopodobieństwo wystąpienia co najmniej jednego epizodu przekroczenia krytycznej grubości pokrywy śnieżnej $h_{cr}$ inicjującego interwencję eksploatacyjną w postaci odśnieżania dach:
\begin{equation} p_s =Prob \{ \text {zajdzie przynajmniej jeden dzień w sezonie, w którym } h_{max} \ge h_{cr} \}\tag{IIc.9}\label{IIc.9}\end{equation}
gdzie $h_{max }$ – maksymalną grubość pokrywy śnieżnej wyznaczona na podstawie wieloletnich danych dobowych stacji synoptycznych IMGW, obejmujących obserwacje dobowej grubości pokrywy śnieżnej na gruncie w kolejnych sezonach zimowych. Wielkość $h_{max}$ stanowi zmienną decyzyjną wskazującą na konieczność podjęcia interwencji eksploatacyjnej (odśnieżania dachu) poprzez porównanie jej z krytyczną grubością pokrywy śnieżnej $h_{cr}$, określoną zgodnie z tab. IIc-2 na podstawie kryterium użytkowego.
Sezon uznawano za incydentalny, jeżeli spełniony był warunek $h_{max} \ge h_{cr}$. Liczba incydentów śnieżnych $N_s$ została zliczona w okresie odniesienia równym projektowemu okresowi użytkowania T=50 lat i oznaczona $N_{s,50}$ . W przypadku innego okresu kontraktowego lub obserwacji T
$N_{s,T}= T/50\cdot N_{s,50}$
Liczba incydentów $N_s$ zdefiniowano jako liczbę występowania sezonów zimowych, w których wystąpiło co najmniej jedno przekroczenie, w całej próbie wieloletniej.
W celu zachowania spójności pomiędzy danymi obserwacyjnymi IMGW odnoszącymi się do pokrywy śnieżnej na gruncie a warunkami decyzyjnymi dotyczącymi dachu, liczbę $N_s$ skorygowano w sposób konserwatywny poprzez odniesienie krytycznej grubości pokrywy śnieżnej do warunków dachowych. W praktyce oznacza to uwzględnienie współczynnika kształtu dachu $\mu \approx 0{,}8$ w postaci przeskalowania progu decyzyjnego, co prowadzi do zwiększenia liczby sezonów uznawanych za incydentalne. Takie podejście jest uzasadnione ograniczoną liczebnością próby wieloletniej, niepewnością przejścia od warunków gruntowych do dachowych oraz pominięciem lokalnych efektów akumulacji śniegu; w konsekwencji zapewnia ono konserwatywną ocenę ryzyka eksploatacyjnego.
W tabeli IIc-3 zestawiono wartości liczby incydentów $N_{s,50}$ dla poszczególnych stref obciążenia śniegiem w Polsce, zdefiniowanych w normie [148] a wyznaczonych z danych stacji synoptycznych IMGW
Tab. IIc-3 Liczba sezonów Ns(50) z incydentem odśnieżania w okresie odniesienia T= 50 lat
\[ \begin{array}{|c|p{3.2cm}|p{3.8cm}|c|c|c|}
\hline \textbf{Strefa} & \textbf{Region klimatyczny} & \textbf{Stacje IMGW}^{ 1)} & \textbf{Dni}^{ 2)} &\textbf{Epizody}^{ 3)} & \textbf{p_s} \\
&&&\text{[dni/rok]} & & \text{[-]} \\
\hline I & zachodnia Polska & [Zach] & 15 \div 30 & \text{rzadkie} & 19 \div 31 \\
\hline II & centrum i północ & [Cen] & 30 \div 50 & \text{umiarkowane} &28 \div 41 \\
\hline III & wschód i północny wschód & [Wsch] & 50 \div 80 & \text{częste} & 41 \div 53 \\
\hline IV & obszary podgórskie & [Góry] & 70 \div 100 & \text{bardzo częste} & 50 \div 59 \\
\hline \end{array}\]
Uwagi do tab. IIc-4
1) Stacje referencyjne IMGW z których pobrano dane w dniu 22 stycznia 2025:
[Zach] Szczecin, Gorzów Wlkp., Zielona Góra,
[Cen] Poznań, Warszawa-Okęcie, Gdańsk, Toruń,
[Wsch] Białystok, Suwałki, Olsztyn,
[Góry] Zakopane, Nowy Sącz, Jelenia Góra
2) Dni – liczba dni z pokrywą śnieżną wg standardów IMGW których grubość pokrywy śnieżnej na gruncie ≥ 1 cm, mierzona o standardowej porze obserwacyjnej.
z okresu ok 50 lat (1970–2020) – zależnie od stacji: niektóre serie zaczynają się w latach 60., inne kończą ok. 2020–2022,
3) Epizody – liczba sezonów z ≥1 epizodem interwencyjnym w sezonie zimowym w okresie 50 lat.
4) Liczba dni z pokrywą śnieżną $\ge 1$ cm (tab. IIc-4) pełni wyłącznie rolę wskaźnika tła klimatycznego, opisującego ogólną „śnieżność” sezonów w danym regionie i umożliwiającego porównanie warunków klimatycznych pomiędzy strefami. Wielkość ta nie jest bezpośrednio wykorzystywana do wyznaczania $N_s$, lecz służy jedynie interpretacji oraz kontroli sensowności uzyskanych zakresów liczby dni z incydentami .
Tab. IIc-4 Koszty odśnieżania dachu vs koszt szkód
\[\begin{array}{|c|p{3.6cm}|c|p|c|c|}
\hline \textbf{Lp.} &\textbf{Typ obiektu} & \textbf{Strefa śniegowa} & C_s\ [\mathrm{zł/akcję}] &C_m\ [\mathrm{zł/sezon}] &C_o\ [\mathrm{zł/zdarzenie}] \\
1 &\text{Hala logistyczna} \; (A \approx 10\,000\ \mathrm{m^2}) & I–II & 15\,000 \div 25\,000 &3\,000 \div 6\,000 & 50\,000 \div 150\,000 \\
2 &\text{ Centrum handlowe} \; (A \approx 15\,000\ \mathrm{m^2}) & II–III & 25\,000 \div 40\,000 & 5\,000 \div 10\,000 & 100\,000 \div 300\,000 \\
3 & \text{Hala produkcyjna} \; (A \approx 8\,000\ \mathrm{m^2}) & II–III & 12\,000 \div 20\,000 & 3\,000 \div 6\,000 &50\,000 \div 200\,000 \\
4 & \text{Obiekt użyteczności publicznej} \; (A \approx 5\,000\ \mathrm{m^2}) & III–IV & 10\,000 \div 18\,000 & 4\,000 \div 8\,000 & 80\,000 \div 250\,000 \\
\hline\end{array}\]
Objaśnienia parametrów w tab. IIc-4:
$C_s$ – koszt pojedynczej akcji odśnieżania dachu (robocizna, sprzęt, zabezpieczenie terenu),
$C_m$ – koszt sezonowego monitoringu i nadzoru (inspekcje, pomiary, dyżury),
$C_o$ – koszt szkód wtórnych związanych z opóźnioną lub nieprawidłową interwencją (uszkodzenia, zalania, przestoje).
Źródła danych:
KOSZT-RYNEK [149],
KOSZT-BIP [150],
KOSZT-GUS [151],
LIT-EKSPL [152]
Zakresy kosztów są celowo szerokie, ponieważ: rynek usług jest lokalnie zróżnicowany; koszty silnie zależą od dostępności ekip „na już”; w analizie ryzyka pracujemy na przedziałach i scenariuszach, nie na jednej liczbie.
Koszt pojedynczej akcji odśnieżania oznaczono przez $C_s$. Przy założeniu niezależności sezonów, oczekiwany koszt odśnieżania w okresie $T$ lat wynosi
\begin{equation} \mathbb{E}[C_{\mathrm{śnieg}}] = T \cdot p_s \cdot C_s \tag{IIc.10}\label{IIc.10}\end{equation}
Do kosztu tego należy dodać koszt ryzyka organizacyjnego, obejmujący możliwość opóźnienia interwencji, jej nieskuteczności lub błędu decyzyjnego. Oczekiwany koszt tego ryzyka można zapisać jako
\begin{equation} \mathbb{E}[C_{\mathrm{org}}] = T \cdot p_s \cdot p_o \cdot C_o, \tag{IIc.11}\label{IIc.11}\end{equation}
gdzie $p_o$ oznacza prawdopodobieństwo nieprawidłowej interwencji, a $C_o$ koszt szkód wtórnych wynikających z takiego zdarzenia.
W wariancie B przekroczenia stanów granicznych użytkowalności mają charakter zdarzeń inicjujących proces degradacji. Oczekiwany koszt SGU w tym wariancie można zapisać w postaci
\begin{equation} \mathbb{E}[C_{\mathrm{SGU},B}] = \sum_{k=1}^{N(T)} \mathbb{E}[C_{\mathrm{SGU}}^{(k)}] \tag{IIc.12}\label{IIc.12}\end{equation}
gdzie $N(T)$ jest losową liczbą przekroczeń SGU w okresie $T$ lat.
Przekroczenie nieodwracalnego SGU zwiększa prawdopodobieństwo wystąpienia stanu granicznego nośności. Zależność tę można opisać za pomocą prawdopodobieństwa warunkowego
\begin{equation} p_{\mathrm{SGN}} = p(\mathrm{SGN} \mid \mathrm{SGU}) \cdot p(\mathrm{SGU}) \tag{IIc.13}\label{IIc.13} \end{equation}
co formalnie wprowadza łańcuch zdarzeń pomiędzy użytkowalnością a nośnością.
\begin{equation} \text{wybierz wariant } \arg \min \left\{ \mathbb{E}[C_A], \mathbb{E}[C_B] \right\} \tag{IIc.14}\label{IIc.14}\end{equation}
Tab. IIc-5 Scenariusze decyzyjne (klimatyczno-eksploatacyjne)- obiekt wielkopowierzchniowy w różnych warunkach zimy
\[ \begin{array}{|c|p{3.4cm}|c|p|c|c|c|}
\hline \textbf{Scenariusz} & \textbf{Opis warunków zimowych} & \textbf{Strefa śniegowa} & h_{\mathrm{cr}}\ [\mathrm{cm}] & p_s\ [-] &C_s\ [\mathrm{zł/akcję}] &T\ [\mathrm{lat}] \\
\hline \text{A1} & \text{Zima łagodna, rzadkie epizody intensywne} & II & 50 & 0.45 & 15\,000 & 50 \\
\text{A2} &\text{Zima typowa, pojedyncze epizody krytyczne} & II &50 &0.55 &20\,000 &50 \\
\text{A3} & \text{Zima surowa, częste kumulacje opadów} & II & 50 & 0.65 & 25\,000 & 50 \\
\text{B1} & \text{Zima łagodna, klimat przejściowy} & III & 67 & 0.65 & 18\,000 &50 \\
\text{B2} & \text{Zima typowa, częste przekroczenia progów} & III & 67 & 0.75 &25\,000 & 50 \\
\text{B3} & \text{Zima surowa, długotrwała pokrywa} & III & 67 & 0.85 & 30\,000 & 50 \\
\hline \end{array} \]
Uwagi do Tabeli IIc-5:
$h_{cr}$ – krytyczna grubość pokrywy śnieżnej inicjująca interwencję eksploatacyjną, wyznaczona z warunku użytkowego przy założeniu $\gamma_{śnieg}= 1.5 \, kN/m^3$.
$p_s$ – prawdopodobieństwo wystąpienia w danym sezonie zimowym co najmniej jednego epizodu przekroczenia $h_cr$, oszacowane na podstawie danych wieloletnich (tab. IIc -2).
$C_s$ – koszt pojedynczej akcji odśnieżania dachu, przyjęty z zakresów podanych w tab IIc-3 dla obiektu wielopiwerzchniowego
$T$ – okres użytkowania obiektu, przyjęty równy 50 lat, zgodnie z analizą cyklu życia.
Źródła danych:
IMGW-PIB [153],
KOSZT-RYNEK [149],
KOSZT-BIP [154].
Tak sformułowany problem decyzyjny nie odwołuje się bezpośrednio do wymagań normowych, lecz do natury zjawiska losowego, częstości jego występowania, odwracalności skutków oraz rzeczywistych kosztów generowanych w całym cyklu życia obiektu.
W raportach [155], ASCE [156], NCRA [157], a także w literaturze kanadyjskiej dotyczącej zarządzania obciążeniem śniegiem Taylor, MKay [158] postępowanie w sensie metodologicznym jest zbieżne z popisanym w rozdziale. W raportach FEMA, ASCE i NRCA zarządzanie obciążeniem śniegiem traktowane jest jako problem decyzyjny obejmujący monitoring, progi interwencyjne i analizę kosztów.
Różnica polega na tym, że w prezentowanym podejściu stosujemy jawną probabilistyczną formalizację zdarzeń użytkowych oraz krytyczne odejściu od normowego podziału na SGU i SGN na rzecz jednego modelu ryzyka, co czyni nasze podejście bardzie czystym matematycznie oraz sformułowanym w sposób czytelny i łatwy do interpretacji oraz adaptacji .
Część III: Niezawodnościowy model dynamiczny konstrukcji budowlanej
Systemowe ujęcie niezawodności i kalibracja miar bezpieczeństwa
Dotychczasowe części pracy poświęcone były analizie lokalnych metod niezawodności oraz ich roli w praktyce inżynierskiej i normowej. W szczególności wykazano, że geometryczne metody aproksymacyjne, takie jak FORM, stanowią użyteczne narzędzie obliczeniowe w określonym zakresie zastosowań, jednak nie mogą być traktowane jako uniwersalna miara niezawodności konstrukcji ani jako obiektywna podstawa estymacji ryzyka. Ograniczenie to nabiera szczególnego znaczenia w kontekście współczesnych systemów normowych, w których niezawodność konstrukcji jest pośrednio kodowana poprzez system częściowych współczynników bezpieczeństwa.
W podejściu normowym niezawodność nie jest estymowana bezpośrednio, lecz implikowana przez spełnienie warunków stanów granicznych przy zastosowaniu współczynników materiałowych i obciążeniowych. Kalibracja tych współczynników była i jest prowadzona w oparciu o założone poziomy niezawodności, przy czym w wielu procedurach narzędziem łączącym opis probabilistyczny z formatem projektowym pozostają lokalne metody niezawodności (Jacinto et al. 2015) [88]. Prowadzi to do sytuacji, w której relacja pomiędzy rzeczywistym prawdopodobieństwem awarii a parametrami normowymi ma charakter pośredni i jest silnie zależna od przyjętego modelu obliczeniowego.
Nowsze analizy wskazują, że kalibracja współczynników częściowych oparta na lokalnych aproksymacjach powierzchni granicznej dziedziczy ograniczenia tych metod, w szczególności w obecności nieliniowości, wielu mechanizmów zniszczenia oraz rozkładów o ciężkich ogonach (Vadalà 2024) [89]. Jednocześnie rozwój metod symulacyjnych, w tym technik redukcji wariancji i importance sampling, umożliwia bezpośrednią i efektywną estymację prawdopodobieństwa awarii oraz odpowiadających mu kwantyli z kontrolą błędu statystycznego, bez konieczności odwoływania się do lokalnych aproksymacji geometrycznych (Tabandeh et al. 2022) [90].
W niniejszej części pracy przyjęto konsekwentnie, że współczynnik niezawodności β stanowi miarę inżynierską wynikającą bezpośrednio z prawdopodobieństwa awarii, zgodnie z relacją β = Φ⁻¹(p_f). Wszelkie interpretacje geometryczne traktowane są wyłącznie jako własności konkretnych estymatorów, a nie jako definicja niezawodności konstrukcji. Takie ujęcie umożliwia spójne porównywanie różnych metod obliczeniowych oraz jednoznaczne powiązanie decyzji projektowych z miarą ryzyka.
Część III poświęcona jest systemowemu ujęciu niezawodności konstrukcji oraz zagadnieniu kalibracji miar bezpieczeństwa w tym kontekście. Punktem wyjścia jest analiza ograniczeń lokalnych metod niezawodności w zastosowaniach normowych, a następnie przejście do ujęcia dynamicznego, w którym stan bezpieczeństwa konstrukcji jest procesem zależnym od czasu, a nie jednorazową oceną w ustalonym momencie.
Ewolucja powierzchni granicznych w czasie
W częściach poprzednich przedstawiono probabilistyczny opis zmiennych losowych, definicję zastępczego współczynnika niezawodności $\tilde{\beta}$ oraz jego geometryczną interpretację, niezależną od wyboru konkretnego modelu probabilistycznego. Wykazano, że przy poprawnej interpretacji zastępczego prawdopodobieństwa przetrwania $\tilde{p}_s$ możliwe jest sprowadzenie oceny niezawodności do jednej, spójnej miary geometrycznej, nawet w przypadku różnych rozkładów brzegowych i odmiennych modeli statystycznych.
Równolegle niezawodność konstrukcji analizowano na poziomie systemowym, jako własność zbioru zdarzeń binarnych odpowiadających uruchomieniu poszczególnych mechanizmów zniszczenia oraz ich zależności statystycznych. Takie ujęcie, charakterystyczne dla klasycznej teorii systemów niezawodnościowych, pozwala na ocenę bezpieczeństwa przy ograniczonej informacji probabilistycznej, jednak nie zapewnia bezpośredniego powiązania z mechaniką zjawisk prowadzących do zniszczenia ani z geometrią przestrzeni losowej.
Celem niniejszej części pracy jest połączenie obu perspektyw – mechanicznej i systemowej – w ramach jednego, dynamicznego modelu niezawodności.
Rys, 17 ilustruje podstawowe cechy dynamicznego modelu niezawodności na przykładzie kilku mechanizmów zniszczenia $M_1,\ldots,M_m$ oraz odpowiadających im funkcji granicznych $g_{M_i}(\mathbf U,t)=0$ w przestrzeni zmiennych niezależnych Gaussa $\mathbf U=(U_1,U_2)$. W przeciwieństwie do ujęcia statycznego, powierzchnie graniczne nie są obiektami stałymi, lecz zmieniają swoje położenie i kształt w czasie, na skutek degradacji materiałów, akumulacji uszkodzeń, zmian warunków użytkowania lub wystąpienia zdarzeń wyjątkowych. Geometrycznie przejawia się to jako przesuwanie lub kurczenie się powierzchni granicznych w przestrzeni losowej. Wraz z ich ewolucją przemieszcza się również punkt najbardziej prawdopodobny zniszczenia, którego położenie w kolejnych chwilach czasu $t_0,t_1,\ldots$ tworzy trajektorię krytyczną. Odpowiadający tej trajektorii współczynnik niezawodności $\tilde{\beta}(t)$ zmienia się w czasie, osiągając minimum w chwili krytycznej $t^\ast$.
W przeciwieństwie do ujęcia statycznego, powierzchnie graniczne nie są obiektami stałymi, lecz zmieniają swoje położenie i kształt w czasie. Zmiany te mogą wynikać z degradacji materiałów, akumulacji uszkodzeń, zmian warunków użytkowania, oddziaływań środowiskowych lub wystąpienia zdarzeń wyjątkowych. Geometrycznie przejawia się to jako „kurczenie się” lub przesuwanie powierzchni granicznych w przestrzeni losowej. Wraz z ewolucją powierzchni granicznych przemieszcza się również punkt najbardziej prawdopodobny zniszczenia (NPP). Jego położenie w kolejnych chwilach czasu $t_0,t_1,\ldots$ tworzy trajektorię krytyczną w przestrzeni losowej, zaznaczoną na rys. 17. Odpowiadający tej trajektorii współczynnik niezawodności $\tilde{\beta}(t)$ zmienia się w czasie, osiągając minimum w chwili krytycznej $t^\ast$.
W klasycznym ujęciu niezawodności analiza sprowadza się do oceny pojedynczego stanu granicznego w ustalonym momencie czasu. W ujęciu dynamicznym stan bezpieczeństwa konstrukcji jest natomiast procesem czasowym, a współczynnik niezawodności $\tilde{\beta}(t)$ należy interpretować jako miarę aktualnego stanu układu, a nie jako stały parametr przypisany konstrukcji na etapie projektu.

Rys. 17. Dynamiczna geometria niezawodności
Połaązenie geometrii powierzchni granicznych z ewolucją czasową umożłiwia przejście od punktowej oceny niezawodności do analizy procesowej; stanowi naturalny pomost pomiędzy klasycznymi metodami FORM a binarnymi i markowowskimi modelami dynamicznymi, które zostaną wprowadzone w dalszej części opracowania.
Dynamiczny model niezawodności opisany powyżej zachowuje pełną informację geometryczną, jednak z punktu widzenia algorytmizacji i analizy systemowej prowadzi do znacznej złożoności obliczeniowej, zwłaszcza w przypadku wielu mechanizmów zniszczenia. Uzasadnia to wprowadzenie jego odmiany binarnej, Model dynamiczny opiera się na ewolucji powierzchni granicznych $g_{M_i}(\mathbf{X},t)=0$ oraz trajektorii krytycznej w przestrzeni losowej. Ujęcie to zachowuje pełną informację geometryczną, lecz z punktu widzenia algorytmizacji oraz analizy systemowej prowadzi do znacznej złożoności obliczeniowej, zwłaszcza w przypadku wielu mechanizmów zniszczenia.
Wraz z ewolucją powierzchni granicznych przemieszcza się również punkt najbardziej prawdopodobny zniszczenia (NPP). Jego położenie w kolejnych chwilach czasu t_0, t_1, \ldots tworzy trajektorię krytyczną w przestrzeni losowej. Odpowiadający tej trajektorii współczynnik niezawodności \tilde{\beta}(t) zmienia się w czasie, osiągając minimum w chwili krytycznej t^\ast. W ujęciu dynamicznym współczynnik \tilde{\beta}(t) należy interpretować jako miarę aktualnego stanu układu, a nie jako stały parametr przypisany konstrukcji na etapie projektu.
Redukcja wektora stanu konstrukcji w modelu dynamicznym
Losową naturę konstrukcji budowlanej, wraz z jej warunkami brzegowymi oraz oddziaływaniem otoczenia, można w sposób wystarczający opisać za pomocą pięciu grup czynników niepewności, ujętych w postaci zastępczych zmiennych stanu $X_1$–$X_5$. Zmienne te stanowią wejście do dynamicznego modelu niezawodności i są interpretowane jako składowe wektora stanu systemu $\mathbf{X}$. Poszczególne czynniki niepewności są opisywane różnymi modelami statystycznymi, w szczególności rozkładami prawdopodobieństwa zestawionymi w tab. 3, a także procesami losowymi, w tym procesami punktowymi (np. procesami Markowa).
W tab. 15 zestawiono podstawowe czynniki niepewności losowych w konstrukcjach budowlanych oraz odpowiadające im zastępcze zmienne stanu systemu.
Tab. 15 Czynniki niepewności losowych konstrukcji budowlanych
\[ \begin{array}{c|l|l|l|l}
\hline \text{Zmienna} & \text{Sens fizyczny} & \text{Charakter niepewności} & \text{Model opisu} & \text{Rola w systemie} \\
\hline
(1) & (2) & (3) & (4) & (5) \\
\hline X_1 & \text{Właściwości materiałów} &
\begin{array}{l}\text{zmienność materiału} \\ \text{i pomiaru}\end{array} & \begin{array}{l}\text{rozkłady prawdopodobieństwa} \\\text{(normalny, log-normalny, Weibull)}\end{array} &\text{nośność, sztywność} \\
\hline X_2 & \text{Geometria i imperfekcje} & \begin{array}{l}\text{wykonanie,} \\\text{montaż}\end{array} &\begin{array}{l}\text{rozkłady odchyłek geometrycznych} \\\text{(np. normalny ucięty)}\end{array} &\text{stabilność, efekty II i III rzędu} \\
\hline X_3 & \text{Obciążenia zewnętrzne} & \begin{array}{l} \text{natura zjawisk} \\ \text{i użytkowanie} \end{array} & \begin{array}{l} \text{rozkłady ekstremalne lub ciągłe} \\\text{(GEV, Gumbel, normalny)} \end{array} & \text{wymuszenia zewnętrzne} \\
\hline X_4 & \text{Model obliczeniowy} & \begin{array}{l} \text{uproszczenia} \\ \text{i przybliżenia} \end{array} & \begin{array}{l} \text{błąd modelu} \\ \text{(przesunięcie + rozrzut)}\end{array} &\text{wiarygodność obliczeń} \\
\hline X_5 & \text{Zdarzenia wyjątkowe} & \begin{array}{l} \text{brak wiedzy o przyszłych} \\ \text{sposobach użytkowania} \end{array} & \begin{array}{l} \text{procesy losowe w czasie} \\ \text{(np. proces Poissona)} \end{array} & \text{zmiana stanu systemu} \\
\hline\end{array}\]
Uwagi do tab. 15
1) W tabeli zestawiono zastępcze zmienne losowe integrujące w sobie czynniki niepewności związane z pięcioma podstawowymi grupami oddziaływań. Zmienne te tworzą wektor stanu systemu $\mathbf{X}$ i mogą mieć różne rozkłady brzegowe, określone typami rozkładów z tab. 2 oraz odpowiadającymi im parametrami.
Każda składowa $X_i$ może być funkcją wielu innych zmiennych losowych. Przykładowo, nośność przekroju zależy jednocześnie od losowych wymiarów geometrycznych oraz losowych właściwości materiałowych. Parametry zmiennej zastępczej $X_i$ są wówczas wyznaczane zgodnie z zasadami rachunku momentów funkcji zmiennych losowych.
2) Macierz korelacji współrzędnych wektora stanu $\mathbf{X}$ powinna być określona na podstawie analizy zjawisk fizycznych oraz tzw. korelacji konstrukcyjnej. Korelacje te nie wynikają wyłącznie z danych statystycznych, lecz często z mechaniki pracy konstrukcji oraz wspólnego źródła niepewności.
3) Wpływ czasu na niezawodność konstrukcji można uwzględniać poprzez modelowanie każdej zmiennej stanu $X_i$ jako procesu stochastycznego lub – w zalecanym podejściu inżynierskim – poprzez zastosowanie rozkładów wartości ekstremalnych zawierających nielosowy parametr okresu powrotu $T$. Takie podejście pozwala sprowadzić problem zmienny w czasie do zadania niezmiennego w czasie.
4) Modelowanie degradacji i zmian właściwości w czasie, takich jak korozja, pełzanie czy zmęczenie materiału, zaleca się realizować poprzez odpowiedni dobór modelu dystrybuanty z zestawienia w tab. 3 oraz poprzez przyjęcie powierzchni granicznej, która w sensie geometrycznym „kurczy się” w czasie.
5) Niepewność epistemiczną, wynikającą z braku pełnej wiedzy o dokładności stosowanego uproszczonego modelu obliczeniowego, należy przypisywać do zmiennej $X_4$.
6) Konieczne jest wyraźne rozróżnienie ról zmiennych $X_4$ i $X_5$. Zmienna $X_4$ opisuje niepewność epistemiczną o charakterze modelowym i systematycznym, natomiast zmienna $X_5$ reprezentuje zdarzenia wyjątkowe i rzadkie, których wystąpienie ma charakter losowy w czasie i może prowadzić do skokowej zmiany stanu systemu.
Binarny model dynamiczny BSDRM (Binary Second-Order Dynamic Reliability Method)
Konstrukcje budowlane wraz z upływem czasu ulegają pogorszeniu stanu technicznego na skutek naturalnego starzenia się materiałów, procesów zużycia eksploatacyjnego oraz braku lub opóźnienia działań utrzymaniowych. Degradacja ma zazwyczaj charakter ciągły, jednak jej bezpośredni pomiar nie zawsze jest możliwy, w szczególności w przypadku elementów niedostępnych lub zakrytych. W takich sytuacjach stan konstrukcji opisuje się za pomocą skończonej liczby stanów reprezentujących kolejne poziomy degradacji w cyklu życia obiektu.
W najprostszym ujęciu proces degradacji można opisać modelem trójstanowym obejmującym: stan normalny (N), stan uszkodzony (U) oraz stan wadliwy lub katastrofalny (W). Taki opis umożliwia powiązanie fizycznego procesu pogarszania się stanu konstrukcji z dyskretnym modelem decyzyjnym stosowanym w analizach niezawodnościowych. Odpowiedni diagram przejść stanów systemu trójstanowego przedstawiono na rys. 18. Bezpośrednie przejście ze stanu N do stanu W, odpowiadające nagłym zdarzeniom prowadzącym do awarii systemu, jest pomijane. Przyjmuje się bowiem, że przed katastrofą obiektu następuje uszkodzenie jednego z elementów mechanizmu zniszczenia, a dopiero w jego następstwie, często w wyniku efektu domina, dochodzi do zniszczenia całej konstrukcji. Stan W jest zatem zawsze poprzedzony stanem U, o ile nie zostaną przeprowadzone działania naprawcze.

Rys. 18 Diagram przejścia stanów dla systemu trójstanowego
Rys. 18 Diagram przejścia stanów dla systemu trójstanowego ( na podstawie [159] )
Takie procesy modelowane są za pomocą łańcuchów Markowa, tj. dyskretnych procesów stochastycznych spełniających własność Markowa. Podejście to pozwala uwzględnić skończoną liczbę stanów, wpływ inspekcji, konserwacji oraz napraw. W klasycznym ujęciu zakłada się znajomość dokładnych intensywności lub prawdopodobieństw przejść pomiędzy stanami, co wymaga dostępu do obszernych danych historycznych. Warunek ten jest jednak rzadko spełniony w przypadku konstrukcji budowlanych projektowanych i wznoszonych jednostkowo. Jak zauważyli Mechri i in. (2013), rzeczywistych problemów inżynierskich nie da się łatwo opisać przy założeniu precyzyjnej znajomości prawdopodobieństw przejść pomiędzy stanami.
W modelowaniu degradacji konieczne jest zatem uwzględnienie niepewności epistemicznej. Jednym z podejść umożliwiających taki opis jest wykorzystanie rozkładów Beta do modelowania parametrów przejść, co pozwala reprezentować niepewność bez istotnego zwiększania złożoności obliczeniowej modelu. Podejście to zostało rozwinięte m.in. przez Zhang i in. (2022) [160] w analizie trójstanowych systemów degradujących się podlegających okresowym inspekcjom. Prezentowany model BSDRM stanowi uogólnienie metody zaproponowanej przez Zhang i in. (2022) na wiele mechanizmów zniszczenia oraz dostosowanie do specyfiki konstrukcji budowlanych. W uogólnionym modelu każdy zidentyfikowany w systemie mechanizm zniszczenia podlega ciągłemu procesowi degradacji, przy czym proces ten uwzględnia okresowe, obowiązkowe przeglądy techniczne. Stan mechanizmu jest znany jedynie w momentach inspekcji lub po wystąpieniu zdarzenia katastrofalnego. Proces degradacji każdego mechanizmu modelowany jest jako jednorodny proces Markowa, co oznacza, że przyszła ewolucja systemu zależy wyłącznie od jego aktualnego stanu.
Prezentowany dynamiczny model niezawodności nazwiemy BSDRM ( Binarna Metoda Niezawodności 2 Rzędu) – ang Binary Second-order Reliability Method jest metodą ogólną w stosunku do znanych metody analizy niezawodności drugiego poziomu, w tym do metody FORM. Metoda BSDRM umożliwia uwzględnienie wpływu czasu na niezawodność systemu konstrukcyjnego, w tym takich zjawisk jak degradacja materiałów, przeglądy stanu technicznego, naprawy oraz zdarzenia wyjątkowe występujące w trakcie eksploatacji konstrukcji.
Poniżej model BSDRM wprowadzany jest stopniowo: najpierw poprzez dynamiczną funkcję graniczną i chwilową miarę niezawodności, następnie przez binarną reprezentację mechanizmów zniszczenia, a w dalszej kolejności poprzez sprzężenie z trójstanowym modelem Markowa opisującym proces degradacji oraz niepewność epistemiczną parametrów przejść.
Mechanizmy zniszczenia i powierzchnie graniczne – interpretacja inżynierska
W dalszym ciągu pracy mechanizm zniszczenia oznaczany jest symbolem $M_i$ i rozumiany jako fizycznie interpretowalny sposób utraty zdolności konstrukcji do spełniania wymaganej funkcji, np.:
- utrata nośności przekroju,
- przekroczenie dopuszczalnego ugięcia,
- utrata stateczności,
- przekroczenie stanu zmęczeniowego,
- zarysowanie przekroju,
- przekroczenie dopuszczalnych drgąń,
- niedostateczna odporność ogniowa,
- uszkodzenie elementu w wyniku zdarzenia wyjątkowego.
Każdemu mechanizmowi $M_i$ odpowiada funkcja graniczna
\begin{equation} g( \mathbf{X}, t) =0 \tag{III.1}\label{III.1}\end{equation}
która w przestrzeni zmiennych losowych $\mathbf{X}$ oraz w czasie $t$ rozdziela stany dopuszczalne i niedopuszczalne.
Z inżynierskiego punktu widzenia funkcja graniczna opisuje równowagę pomiędzy zdolnością konstrukcji do przenoszenia oddziaływań a rzeczywistymi obciążeniami i warunkami pracy. W praktycznym zapisie przyjmuje ona postać
W praktycznym ujęciu inżynierskim dynamiczną funkcję graniczną zapisuje się jako różnicę losowej nośności i losowych oddziaływań
\begin{equation} g(\mathbf{X},t)\stackrel{\mathrm{def}}{=}R(\mathbf{X},t)-E(\mathbf{X},t), \tag{III.2}\label{III.2}\end{equation}
gdzie:
$\mathbf{X}=[X_1,X_2,X_3,X_4,X_5]$ jest wektorem stanu konstrukcji,
$t$ – czas bieżący,
$R(\mathbf{X},t)$ – losowa nośność konstrukcji,
$E(\mathbf{X},t)$ – losowe oddziaływania.
Zmienna losowa i stan logiczny mechanizmu
Dla danego mechanizmu $M_i$ wprowadza się zmienną losową $Z_i$ (margines bezpieczeństwa)
która opisuje, „jak daleko” aktualny stan konstrukcji znajduje się od granicy bezpieczeństwa.
\begin{equation} Z_i (t) \stackrel{\mathrm{def}}{=} g_M (\mathbf{X}, t),t \tag{III.3}\label{III.3}\end{equation}
Na potrzeby opisu systemowego margines ten rzutowany jest na stan binarny mechanizmu
co odpowiada klasycznemu rozumieniu: mechanizm albo nie został uruchomiony, albo doprowadził do utraty funkcji.
Stan bezpieczeństwa i dynamiczny stan graniczny
W przeciwieństwie do klasycznego ujęcia statycznego, w którym funkcja graniczna zależy wyłącznie od wektora zmiennych losowych $\mathbf{X}$, w ujęciu dynamicznym zarówno położenie, jak i kształt powierzchni granicznej mogą zmieniać się w czasie. Dynamiczną funkcję graniczną definiuje się w postaci
\begin{equation} g(\mathbf{X},t),\tag{III.4}\label{III.4}\end{equation}
gdzie $t$ oznacza czas bieżący.
Zapis $g(\mathbf{X},t)$ należy rozumieć jako rodzinę funkcji granicznych parametryzowanych czasem, a nie jako jedną funkcję o stałej postaci geometrycznej.
Obie wielkości mogą zależeć od czasu w sposób deterministyczny lub stochastyczny, a zmienna $X_5$ reprezentuje zdarzenia wyjątkowe o charakterze skokowym.
Ponieważ czas $t$ parametryzuje losowy model dynamiczny, cały opis można traktować jako proces stochastyczny.
Stan konstrukcji w czasie
Stan konstrukcji w chwili $t$ opisany jest warunkiem
\begin{equation} St(t)= \begin{cases}0, & g_{M_i}(\mathbf{X}(t),t)>0 \quad \text{(stan bezpieczny)},\\
1, & g_{M_i}(\mathbf{X}(t),t)\le 0 \quad \text{(stan zniszczenia)},
\end{cases} \tag{III.5}\label{III.5}\end{equation}
gdzie $g_{M_i}$ oznacza funkcję graniczną i-tego mechanizmu zniszczenia.
W dalszej części rozdziału opis stanu konstrukcji prowadzony będzie na poziomie mechanizmów zniszczenia oraz ich agregacji systemowej; zmienna $St(t)$ pełni tu rolę ilustracyjną.
Dynamiczna powierzchnia graniczna stanowi podstawę do określenia chwilowego prawdopodobieństwa przetrwania $\tilde{p}_s(t)$ oraz odpowiadającego mu zastępczego współczynnika niezawodności
\begin{equation} \tilde{\beta}(t)\stackrel{\mathrm{def}}{=} \Phi^{-1}\!\big[\tilde{p}_s(t)\big],\tag{III.6}\label{III.6}\end{equation}
gdzie
$\tilde{p}_s(t)=\mathrm{Prob}\{g(\mathbf{X},t)>0\}$,
a $\Phi(\cdot)$ jest dystrybuantą standaryzowanego rozkładu normalnego.
Współczynnik $\tilde{\beta}(t)$ nie jest indeksem Hasofera–Linda, lecz geometryczną transformacją chwilowego prawdopodobieństwa przetrwania.
Logiczny schemat dynamicznej analizy niezawodności ma postać
$ \mathbf{X}(t)\rightarrow g(\mathbf{X},t) \rightarrow \tilde{p}_s(t)\rightarrow \tilde{\beta}(t)$
Powyższa sekwencja odzwierciedla logiczny tok analizy niezawodności w ujęciu dynamicznym: od opisu fizycznych źródeł niepewności, poprzez model mechaniczny, aż do jednoznacznej miary niezawodności.
Dynamiczny współczynnik niezawodności
Globalną miarę niezawodności konstrukcji w projektowym okresie użytkowania $[0,T]$ definiuje się jako minimum chwilowego współczynnika niezawodności
\begin{equation} \tilde{\beta}_{\min}= \min_{t\in[0,T]}\tilde{\beta}(t). \tag{III.7}\label{III.7}\end{equation}
Miara ta identyfikuje najbardziej niekorzystny moment eksploatacji i odpowiadający mu stan konstrukcji. W sensie niezawodnościowym proces ewolucji konstrukcji w czasie można interpretować jako układ szeregowy zdarzeń następujących po sobie w kolejnych chwilach czasu, w którym o bezpieczeństwie decyduje najsłabsze ogniwo czasowe.
Moment krytyczny $t^\ast$ spełnia zależności
$\tilde{\beta}_{\min}=\tilde{\beta}(t^\ast)$ oraz
$\tilde{p}_s(t^\ast)=\min_{t\in[0,T]}\tilde{p}_s(t)$.
Trajektoria krytyczna
W dynamicznym ujęciu niezawodności utrata bezpieczeństwa konstrukcji nie musi być związana z pojedynczym punktem w przestrzeni losowej, lecz z sekwencją stanów układu rozwijających się w czasie. W tym celu wprowadza się pojęcie trajektorii krytycznej $\mathbf{X}^\ast(t)$, rozumianej jako trajektoria prowadząca do globalnego minimum
$\tilde{\beta}(t)$.
Formalnie trajektorię krytyczną definiuje się jako rozwiązanie zadania optymalizacyjnego
\begin{equation} \mathbf{X}^\ast(t)\stackrel{\mathrm{def}}{=} \arg\min_{\mathbf{X}(t),\,t\in[0,T]}\tilde{\beta}(t), \tag{III.8}\label{III.8}\end{equation}
przy ograniczeniach:
$g(\mathbf{X}(t),t)\ge 0$ dla $t\in[0,T)$ oraz
$g(\mathbf{X}^\ast(t^\ast),t^\ast)=0$ w chwili krytycznej $t^\ast$.
Minimalizacja ta ma charakter globalny i dotyczy trajektorii $\mathbf{X}(t)$ jako całości, a nie niezależnych punktów w kolejnych chwilach czasu.
W chwili krytycznej spełniony jest uogólniony warunek styczności
$ \nabla_{\mathbf{X}} g(\mathbf{X}^\ast(t^\ast),t^\ast) \parallel \nabla_{\mathbf{X}} \tilde{\beta}(\mathbf{X}^\ast(t^\ast),t^\ast),$
co oznacza, że dalsza ewolucja trajektorii prowadziłaby do obszaru stanów niedopuszczalnych.
Binarna reprezentacja mechanizmów zniszczenia
Dla każdego mechanizmu zniszczenia $M_i$ wprowadza się binarną zmienną stanu
\begin{equation} M_i(t)= \begin{cases}
0, & g_{M_i}(\mathbf{X}(t),t)>0,\\
1, & g_{M_i}(\mathbf{X}(t),t)\le 0,
\end{cases} \tag{III.9}\label{III.9}\end{equation}
Która informuje wyłącznie o fakcie przekroczenia granicy nośności przez dany mechanizm. Stan systemu konstrukcyjnego w chwili $t$ opisany jest przez wektor binarny
$ \mathbf{M}(t)=[M_1(t),M_2(t),\ldots,M_m(t)]\in\{0,1\}^m.$
W celu uwzględnienia różnej istotności mechanizmów zniszczenia
definiuje się ważoną miarę stanu systemu
\begin{equation} S(t)=\sum_{i=1}^{m} w_i\,M_i(t), \tag{III.10}\label{III.10}\end{equation}
gdzie $w_i>0$ są wagami mechanizmów.
Stan zniszczenia systemu spełnia warunek
\begin{equation}S(t)\ge S_{\mathrm{cr}}, \tag{III.11}\label{III.11}\end{equation}
przy czym dobór progu $S_{\mathrm{cr}}$ umożliwia odtworzenie klasycznych struktur niezawodnościowych: szeregowej, równoległej oraz mieszanej.
Proces degradacji – trójstanowy model Markowa
Każdy mechanizm zniszczenia $M_i$ może znajdować się w jednym z trzech stanów: normalnym Ni, uszkodzonym Ui lub wadliwym (katastrofalnym) Wi.
Intensywności przejść pomiędzy stanami NUW dla mechanizmu „i” opisuje macierz
\begin{equation} \mathbf{A}_i=\begin{bmatrix}
-\lambda_{N,i} & \lambda_{N,i} & 0\\
0 & -\lambda_{U,i } & \lambda_{U,i}\\
0 & 0 & 0
\end{bmatrix},\tag{III.12}\label{III.12}\end{equation}
gdzie $\lambda_{N,i}$ odpowiada przejściu między stanami $N_i\rightarrow U_i$, natomiast $\lambda_{U,i}$ przejściu ze stanu uszkodzonego do zniszczenia $U_i\rightarrow W_i$.
Wektor prawdopodobieństw przebywania mechanizmu $M_i$ w poszczególnych stanach ma postać
\begin{equation} \mathbf{P}_i(t)=\big[P_{N,i}(t),P_{U,i}(t),P_{W,i}(t)\big]. \tag{III.13}\label{III.13}\end{equation}
Ewolucja wektora $\mathbf{P}_i(t)$ pomiędzy kolejnymi inspekcjami opisana jest równaniem Chapmana–Kołmogorowa
\begin{equation}\frac{d\mathbf{P}_i(t)}{dt}=\mathbf{P}_i(t)\mathbf{A}_i, \qquad \mathbf{P}_i(t)= \mathbf{P}_i(t_{I,k}) \exp\!\big(\mathbf{A}_i(t-t_{I,k})\big),
\tag{III.14}\label{III.14}\end{equation}
dla $t\in[t_{I,k},t_{I,k+1})$.
Projektowy okres użytkowania konstrukcji oznaczono symbolem $T$, natomiast $\Delta T_I = t_{I,k}-t_{I,k-1}$ jest stałym interwałem inspekcji.
Niepewność epistemiczna intensywności przejść
Niepewność oszacowania intensywności przejść $\lambda_{ij}(i=1 \ldots m), (j = N,U,W) $ przy ograniczonej dostępności danych eksploatacyjnych uwzględnia się poprzez nadanie im losowości. Przyjmuje się, że
\begin{equation} \lambda_{ij}=\lambda_{ij}^{\min} +\xi_{ij}\big(\lambda_{ij}^{\max}-\lambda_{ij}^{\min}\big),\qquad (j=1,2), \tag{III.15}\label{III.15}\end{equation}
gdzie zmienna losowa $\xi_{ij}$ ma rozkład Beta
\begin{equation} \xi_{ij}\sim\mathrm{Beta}(\alpha_{ij},\beta_{ij}). \tag{III.16}\label{III.16}\end{equation}
Wartość oczekiwana i wariancja intensywności przejść wynoszą
\begin{equation} \mathbb{E}[\lambda_{ij}]= \lambda_{ij}^{\min} +\frac{\alpha_{ij}}{\alpha_{ij}+\beta_{ij}} \big(\lambda_{ij}^{\max}-\lambda_{ij}^{\min}\big),
\tag{III.17}\label{III.17}\end{equation}
\begin{equation}
\mathrm{Var}[\lambda_{ij}]= \frac{\alpha_{ij}\beta_{ij}} {(\alpha_{ij}+\beta_{ij})^2(\alpha_{ij}+\beta_{ij}+1)} \big(\lambda_{ij}^{\max}-\lambda_{ij}^{\min}\big)^2.
\tag{III.18}\label{III.18}\end{equation}
Sprzężenie z dynamiczną miarą niezawodności
Prawdopodobieństwo przebywania mechanizmu $M_i$ w stanie wadliwym $ q_i(t)=P_{i,W}(t)$ prowadzi do wprowadzenia binarnej zmiennej
\begin{equation}I_i(t)=\begin{cases}
1, & M_i(t)=W_i,\\
0, & M_i(t)\in\{N_i,U_i\},
\end{cases} \tag{III.19}\label{III.19}\end{equation}
oraz wektora stanu systemu
\begin{equation} \mathbf{M}(t)=[I_1(t),I_2(t),\ldots,I_m(t)]\in\{0,1\}^m. \tag{III.20}\label{III.20}\end{equation}
Zdarzenie przetrwania systemu w chwili $t$ ma postać
\begin{equation} \Omega_s(t)=\{S(t)<S_{\mathrm{cr}}\}, \tag{III.21}\label{III.21}\end{equation}
a zastępcze prawdopodobieństwo przetrwania
\begin{equation} \tilde{p}_s(t)=\Pr\{S(t)<S_{\mathrm{cr}}\}. \tag{III.22}\label{III.22}\end{equation}
Na tej podstawie definiuje się dynamiczny zastępczy współczynnik niezawodności
\begin{equation} \tilde{\beta}(t)=\Phi^{-1} \big(\tilde{p}_s(t)\big),\tag{III.23}\label{III.23}\end{equation}
oraz globalną miarę niezawodności w okresie $[0,T]$
\begin{equation} \tilde{\beta}_{\min}= \min_{t\in[0,T]}\tilde{\beta}(t). \tag{III.24}\label{III.24}\end{equation}
Dynamiczna metoda BSDRM łączy opis mechaniczny, probabilistyczny i decyzyjny w jednolitą ramę analizy niezawodności konstrukcji w czasie.
W tab. 15 zestawiono zasadnicze cechy trójstanowego modelu Markowa stosowanego w dynamiczne metodzie BSDRM.
Tab. 16 Trójstanowy model Markowa konstrukcji
\[ \begin{array}{c|cccc}
\hline \text{Stan} & \text{Opis}& \text{Intensywność} & \text{Generator} & \text{Interpretacja} \\
& \text{techniczny}& \text{przejścia}& \text{procesu}& \text{inżynierska} \\
\hline \text {(1)} & (2) & (3) & (4) & (5) \\
\hline N & \text{Stan sprawny} & \lambda_{N}\;^{(1)} & q_{N}=\lambda_{N}& \text{Eksploatacja bez uszkodzeń} \\
U & \text{Stan degradacji} & \lambda_{U}\;^{(2)} & q_{U}=\lambda_{U} & \text{Postępujące uszkodzenia, utrata rezerwy} \\
W & \text{Stan zniszczenia} & – & q_{W}=0\;^{(3)} & \text{Utrata nośności lub użytkowalności} \\
\hline \end{array}\]
Uwagi do tab 16:
(1) Intensywność \lambda_{N} opisuje tempo przejścia konstrukcji ze stanu sprawnego do stanu degradacji.
(2) Intensywność \lambda_{U} opisuje tempo przejścia ze stanu degradacji do stanu zniszczenia.
(3) Stan W jest stanem pochłaniającym (zniszczenia) ; po jego osiągnięciu nie występują dalsze przejścia.
(4) Tab. 16 jest interpretacją tab. 13 dla trójstanowego procesu Markowa z modelu dynamicznego niezawodności.
Przykłady rachunkowe
Przykład I.1 [Momenty statystyczne. Metoda ścisła i porównanie z linearyzacją]
Pole powierzchni pręta zbrojeniowego o losowej średnicy D
Wyznaczyć wartość oczekiwaną i wariancję pola powierzchni pręta zbrojeniowego o losowej średnicy promieniu R=∅/2. Zmienne losowe oznaczymy dużymi literami R, a ich realizacje (wartości ) małymi literami r.
Metoda ścisła
Okrągłe pręty zbrojeniowe wykonano z tolerancjami promienia R, rozłożonymi podług normalnego rozkładu prawdopodobieństwa z wartością oczekiwaną $\mathcal {E} R= \mu_r = r_o$ oraz odchyleniem standardowym $ \sigma_r$ .
Funkcję gęstości zmiennej losowej promienia R można zapisać w postaci:
$ f(R)=\cfrac{1}{\sigma_r \sqrt2\pi}\cdot exp \left[-\cfrac{1}{2}\left(\cfrac{R – \mu_r}{\sigma_r}\right)^2\right]\qquad (P1.1)$
Z punktu widzenia wytrzymałościowego istotne jest pole przekroju zbrojenia $A(R) = \pi R^2$, które jest nieliniową funkcją losowego promienia $R$.
Do wyznaczenia momentów losowych funkcji $A(R) $ : wartości średniej $ \mu_A$ oraz odchylenia standardowego $\sigma_A$ zastosujemy najpierw ścisłe formuły, przy czym W miejsce funkcji $\Theta(X) , będziemy podstawiać A(R):
($\ref{I.25}$) $\to$ $ \mu_A=\int \limits _{-\infty}^{\infty}\pi r^2 f(r) dr=\pi \cfrac {1}{\sigma \sqrt{2\pi}} \quad \int \limits _{-\infty}^\infty r^2\cdot exp \left[-\cfrac{1}{2} \left( \cfrac {r-\mu_r}{\sigma_r}\right)^2 \right]dr \qquad (P1.2) $
Ostatnia całka wraz z mnożnikiem $ \pi \cfrac{1}{\sigma_r \sqrt{2 \pi}}$ z definicji jest momentem drugiego rzędu losowej wielkości R, który oczywiście jest równy $r_o^2+\sigma_r^2$. Stąd otrzymujemy:
$\mu_A= \pi (r_o^2+\sigma_r^2) \qquad (P1.3) $
($\ref{I.27}$) $\to$ $ Var[A] = \sigma^2_A = \pi^2\cfrac{1}{\sigma_r \sqrt{2 \pi}} \int \limits_{-\infty}^\infty (r^2 – r_o^2 – \sigma_r^2)^2 \cdot exp -\left( \cfrac {r – r_0 }{\sigma_r}\right)^2 dr$
Po obliczeniu tej całki, otrzymamy:
$\sigma^2_A = 2 \cdot \pi^2 \sigma_r^2 \cdot (2 \cdot r_0^2 +\sigma_r^2) \qquad (P1.4) $
Linearyzacja
Dla powyższego zadania, w którym ściśle obliczono wartość oczekiwaną i odchylenie standardowe pola przekroju pręta, oszacujemy te parametry w sposób przybliżony w drodze linearyzacji funkcji losowej
$A(r) = \pi r^2$ w otoczeniu wartości średniej promienia pręta $= r_0=\mu_r$.
Z rozwinięcia ($\ref{IIa.1}$) funkcji $A(r) w szereg Taylora po zachowaniu członów liniowych otrzymujemy liniową aproksymację w otoczeniu
$A(r) \approx A(r_o) + \cfrac{\partial A(r)}{\partial r}|_{r=r_0} = \pi \cdot r_o^2 + 2\cdot \pi \cdot r = \pi\ (r_0^2 +2\cdot r)$
skąd:
$ \mu_A\approx A (\mu_r)=A (r_0)=\pi {r^2}_0 $
$ {\sigma^2}_A = 4 \pi {r^2}_0 {\sigma^2}_r$
Porównując formuły przybliżone ze ścisłymi , widzimy, że wynik przybliżony jest bliski ścisłemu jeśli tylko $\sigma_r \ll r_0$, to jest jeśli odchylenie standardowe jest małe w stosunku do wartości oczekiwanej. Na przykład przy $V_r=\cfrac{\sigma_r}{\mu_r}= 10 \%$ , błąd oszacowania wartości oczekiwanej wynosi 1%, a odchylenia standardowego 0,5%.
Słup o losowej długości
Znaleźć momenty losowego ugięcie $f$ końca wspornikowej słupa Timoshenko (z uwzględnieniem sztywności postaciowej) o losowej długości $L$ i innych parametrach nielosowych, w tym o nielosowej sztywności giętnej $EI$ oraz postaciowej $S_v$, pokazanego na rys. P1-1.

Rys. P1-1 . Słup-wspornik: a) przekrojowe siły wirtualne do wyznaczenia przemieszczenia, b) losowa gęstość równomierna długości słupa L
Momenty statystyczne losowej długości słupa L
Losowa długość pręta X=L ma jednostajny rozkład prawdopodobieństwa z gęstością prawdopodobieństwa (rys. P2-1b):
$\cfrac{1}{2\cdot \Delta L}$ w przedziale $(L-\Delta L ; L+\Delta L)$, a poza tym przedziałem jest równa zero.
Tak przyjęty rozkład oznacza, że w przedziale możliwych wartości długości belki $L \pm \Delta L$, gdzie $\Delta L$ jest dopuszczalną tolerancją może przyjąć każdą wartość z tym samym prawdopodobieństwem
$p= Pr\{X=x\}= \cfrac{1}{2 \Delta L}$,
a kontrolę jakości wyklucza wartości spoza tego przedziału.
Z własności rozkładu jednostajnego, wynika że wartość oczekiwana długości belki wynosi
$\mu_L= \cfrac{(L-\Delta L)+(L+\Delta L)}{2}=L$,
a wariancja
$Var L= \cfrac{[(L- \Delta L)-(L+ \Delta L)]^2}{10}= \cfrac {\Delta^2 L} {9}$.
Przemieszczenie $f$ końca wspornika (pod siłą P) można wyznaczyć ze znanej zależności (np artykuł autora):
$f =\int \limits_0^L \left( \cfrac{M \overline M}{EI} + \cfrac{V \overline V}{S_v} \right ) dx$
Na rys. P3-1a przedstawiono wykresy wirtualnych sił przekrojowych , występujące w powyższej formule.
Po „przemnożeniu” tych wykresów sił, otrzymujemy formułę na ugięcie $f$, które jest funkcją losowego argumentu $Y= L$:
$Y=\cfrac {PL^3}{3EI} +\cfrac{PL}{S_v}= \cfrac{P }{3 EI}( L^3+ 3 k\cdot L)$
gdzie współczynnik podatności na ścinanie $k = \cfrac{EI}{S_v} $.
Ścisłe momenty statystyczne przemieszczenia wspornika Timoshenko
Wartość oczekiwana ugięcia belki obliczona ze znanej gęstości prawdopodobieństwa wynosi:
$(\ref{I.25}) \to$ $\mu_f = C \cdot p \int \limits_{L- \Delta}^{L+ \Delta}\ (x^3 + 3k x) dx= C L (L^2 +\Delta^2 +3k)$
gdzie wprowadzono oznaczenia:
$\Delta=\Delta L$ ;
$C=\cfrac{P}{3 EI}$ ; $p=\cfrac{1}{2 \Delta}$
Wariancja ugięcia $f$ wynosi:
$(\ref{I.27}) \to$ $ Var f = C^2 p \int \limits_{L- \Delta}^{L+ \Delta}(x^3 + 3k x)^2 dx = C^2 \Delta^2 \left ( 3L^4 +2L^2 \Delta^2 +3k^2 +\cfrac{6k}{11} (5 L^2 +\Delta^2) +\cfrac{\Delta^4}{23} \right) $
Dla długości belki wykonanej bez odchyłki wymiarowej $\Delta=0$ wariancja jest zerowa.
Kowariancja i współczynnik korelacji ugięcia f z losową długością L wynoszą:
$Cov _{f L}= C p \int \limits_{L- \Delta}^{L+ \Delta}(x^3 + 3k x) \cdot (x-L) dx = C \Delta^2 \left ( L^2+k+\cfrac {\Delta^2}{11} \right)$
$\rho_{f L}=\cfrac{L^2+k +\cfrac{\Delta^2}{11}} {\sqrt{ (k+L^2)^2+ \cfrac {12}{137} (3k+5 L^2)\Delta^2 +\cfrac{\Delta^4}{20}}}$
Dla $\Delta=0$ korelacja jest pełna ($\rho_{f L}=1$).
Ścisłe momenty statystyczne ugięcia wspornika Bernoulligo
Dla $k=0$ (dla klasycznej belki Bernoulliego) powyższe formuły upraszczają się do postaci :
$\mu_f= C L (L^2 +\Delta^2)$,
$ Var f == C^2 \Delta^2 \left ( 3L^4 +2L^2 \Delta^2 +\cfrac{\Delta^4}{23} \right) $,
$ Cov \{ f, L \}=C \Delta^2 \left ( L^2\cfrac {\Delta^2}{11} \right) $,
$\rho_{fL}=\cfrac{L^2+\cfrac{\Delta^2}{11}} {\sqrt{ L^4+ \cfrac {12}{20}\Delta^2L^2 +\cfrac{\Delta^4}{20}}}$
Przemieszczenie wspornika Timoshenko ma takie parametry dla $\Delta=0 $, to znaczy dla długości belki wykonanej bez odchyłki wymiarowej. Do porównania wrócimy jeszcze podczas omawiania metody linearyzacji.
Linearyzacja ($\ref{I.32}$)
Pochodna cząstkowa funkcji $f(x)$ (12) przy oznaczeniu $x=L$ wynosi:
$ Y(x)^{’}= \cfrac {\partial Y (x)}{\partial x}= 3C ( x^2+k)$
a zlinearyzowne momenty statystyczne wynoszą
$ \tilde {\mu_f}= \varphi(\mu_x)=3C(L^2+k) $,
$ tilde {Var f} = |\varphi^{’} (\mu_x)|^2 \cdot \sigma_x^2=|\varphi^{’} (L)|^2 \cdot \sigma_L^2=C^2 \Delta^4(k+L^2)^2$
Porównując powyższe oszacowania z wartościami ścisłymi otrzymujemy:
$ \cfrac {\mu_Y} {\tilde{\mu_Y}}=1+ \cfrac {\Delta^2} {L^2+3k}
\cfrac {Var Y} {\tilde{Var Y}}=1+….
W prezentowanym przykładzie dla $k=0$ (belka Bernoulliego) i dla spotykanego w praktyce $\cfrac {\Delta}{L} \approx 3 \%$ błąd oszacowania średniej i wariancji jest zaniedbywalny.
Przykład I.2 [Kowariancja zmiennych losowych $X$ i $Y$ związanych zależnością funkcyjną]
Znależć korelację statystyczna pomiędzy dwoma zmiennymi losowymi #X i $Y$ związanymi zależnością funkcyjną $Y=X^2$. Obie zmienne mają równomierne rozkłady prawdopodobieństwa.
W przypadku równomiernego rozkładu $X$ w przedziale (-a,a) kowariancja ($\ref{I.20}$) zmiennych $X$ i Y$ jest równa [161] :
$Cov \{X,Y\}= \int \limits_{-a}^a \cfrac{x(x^2-\mu_x)} {2}dx=0$
Wobec tego współczynnik korelacji wynosi
($\ref{I.20}$) $\to \rho_{xy}= \cfrac{Cov \{X,Y\}}{\sigma_x \sigma_y}=0$,
gdzie: $\sigma_x=\sqrt{Var X}$, $\sigma_y=\sqrt{Var Y}$ – odchylenia standardowe zmiennej $X$ i $Y$ odpowiednio.
Z powyższej własności wynika , że zmienne $X$ i $Y$ są nieskorelowane, mimo silnego związku funkcyjnego. Zachodzi tak, ponieważ bo ich rozkład łączny jest symetryczny.
Przykład IIa.1 [ Normalizacja analityczna. Formuły dla zmiennej Gaussa, lognormalnej, Gumbela min , Weibulla min, max ]
Wyprowadzić formuły na normalizację analityczną zmiennej o rozkłądzoe Gaussa (noremalnym), lognortmlanym, Gumberla min oraz Weibulla min oraz max
Cel normalizacji
Celem normalizacji jest sprowadzenie każdej zmiennej losowej $X_i$ do zmiennej $Z_i \sim \mathcal{N}(0,1)$ przy zachowaniu równoważności probabilistycznej, tj. zachowaniu kwantyli. Normalizacja realizowana jest przez transformację (normalizację) kwantylową
$Z_i=\Phi^{-1} [ F_{X_i}( X_i)] $
(i realizacja zmiennej losowej):
$z_i = \Phi^{-1}(F_{X_i}(x_i))$
Normalizacja zmiennej o rozkładzie Gaussa (normalnym)
Jeżeli zmienna $X_i$ ma rozkład normalny $X_i \sim \mathcal{N}(\mu_i,\sigma_i^2)$, to jej dystrybuanta ma postać $F_{X_i}(x_i)=\Phi!\left(\dfrac{x_i-\mu_i}{\sigma_i}\right)$
Po podstawieniu do definicji normalizacji otrzymujemy: $Z_i=\Phi^{-1}!\left(\Phi!\left(\dfrac{X_i-\mu_i}{\sigma_i}\right)\right) = \dfrac{X_i-\mu_i}{\sigma_i}$
(i dla realizacji) $z_i=\dfrac{x_i-\mu_i}{\sigma_i}$
W tym szczególnym przypadku normalizacja pokrywa się algebraicznie ze standaryzacją, ale jest to wyjątek, a nie regułą ( p.Przypadek trywialny : normalizacja rozkładu Gaussa)
Normalizacja zmiennej o rozkładzie log-normalnym
Rozkład log-normalnym $\mathcal{L}$, stosowany jest do opisu zmiennych losowych przyjmujących wyłącznie wartości dodatnie (np. obciążenia grawitacyjne stałe i zmienne).
Zmienna $X$ ma rozkład log-normalny, jeśli jej logarytm naturalny ma rozkład normalny
$ \ln X = Y \sim \mathcal N \left( \mu_{\mathcal L,X},\sigma_{\mathcal L,X}^2 \right) $.
Dystrybuanta rozkładu ma postać $F_X(x)=\Phi \left(\dfrac{\ln x-\mu_{\mathcal{L},X}}{\sigma_{\mathcal{L},X}}\right)$ ( p. też tab.2 ).
Wartość oczekiwana i wariancja rozkładu log-normalnego wynoszą:
$\mathbb{E}[X]=\exp (\mu_{\mathcal{L},X}+\sigma_{\mathcal{L},X}^2/2)$,
$\mathrm{Var}[X]=\exp (2\mu_{\mathcal{L},X}+\sigma_{\mathcal{L},X}^2),[\exp(\sigma_{\mathcal{L},X}^2)-1]$.
Po podstawieniu wyrażenia na dystrybuantę rozkładu $ \Phi(z)=\Phi \left( \cfrac{ \ln x-\mu_{\mathcal L,X}} {\sigma_{\mathcal L,X}}\right) $, otrzymujemy formułę normalizacji:
$\mathcal{L}\rightarrow\mathcal{N}:\quad Z=\dfrac{\ln X-\mu_{\mathcal{L},X}}{\sigma_{\mathcal{L},X}}$.
i transformację odwrotną:
$\mathcal{N}\rightarrow\mathcal{L}: \quad X=\exp(\mu_{\mathcal{L},X}+\sigma_{\mathcal{L},X} Z)$.
Parametry $\mu_{\mathcal{L},X}$ i $\sigma_{\mathcal{L},X}$ mogą być wyznaczone z estymatorów średniej $m_X$ i odchylenia standardowego $s_X$.
Z rozwiązania powyższych równań względem parametrów rozkładu log-normalnego, uzyskujemy:
\[ \sigma_{\mathcal L, X }= \sqrt{ \ln { \left [1+ (s_X/ m_X)^2 \right] } } = \sqrt{ \ln { \left [1+ v_X^2 \right] } } \]
\[ \mu_{\mathcal L, X} = \ln {\left ( m_X^2 / \sqrt{m_X^2 + s_X^2} \right)}= \ln {\left ( m_X / \sqrt{1+v_X^2 } \right)}= ln (m_X) – \cfrac{\sigma_{\mathcal L }^2}{2} \]
Można sprawdzić, że uzyskane formuły ) są zgodne z zależnościami podanymi w tab.6, dla rozkładu log-normalnego.
Normalizacja zmiennej o rozkładzie Weibulla (min)
Jeżeli zmienna $X$ ma rozkład Weibulla typu minimów, o dystrybuancie
$F_X(x)=1-\exp!\left[-\left(\dfrac{x}{\lambda}\right)^k\right]$,
to transformacja normalizująca ma postać:
$Z_i = \Phi^{-1}!\left(1-\exp!\left[-\left(\dfrac{X_i}{\lambda_i}\right)^{k_i}\right]\right)$.
Normalizacja zmiennej o rozkładzie Gumbela (min)
Rozkład Gumbela typu minimów opisuje zmienne, dla których istotne są wartości najmniejsze (np. minimalna nośność, minimalna wytrzymałość).
Dystrybuanta ma postać
$F_X(x)=1-\exp!\left[-\exp!\left(\dfrac{x-\alpha}{\beta}\right)\right]$.
to transformacja normalizująca ma postać:
$Z=\Phi^{-1}!\left(1-\exp!\left[-\left(\dfrac{X}{\lambda}\right)^k\right]\right)$.
Transformacja ta jest szczególnie istotna dla zmiennych opisujących: degradację, trwałość, właściwości kontrolowane przez „najsłabszy element”.
Normalizacja zmiennej o rozkładzie Gumbela (max)
Jeżeli zmienna $X$ (np. obciążenie śniegiem) ma rozkład Gumbela typu maksimów:
$F_{X}(x)=\exp!\left[-\exp \left(-\dfrac{x-\alpha}{\beta}\right)\right]$,
to transformacja normalizująca ma postać:
$Z = \Phi^{-1} \left( \exp \left [- \exp \left(-\dfrac{X -\alpha }{\beta}\right)\right]\right)$.
Transformacja ta jest ściśle monotoniczna, zachowuje kwantyle i eliminuje asymetrię rozkładu.
UwagiL
1) Po transformacji normalizacyjnej kwantylowej $ Z=\Phi^{-1}(F_X(X))$ zmienna $Z$ ma dokładnie rozkład standardowy normalny, tj, : $\mathbb{E}[Z]=0$, $\mathrm{Var}(Z)=1$.
Centrowanie (standaryzacja) są konsekwencją normalizacji, a nie jej definicją.
2) Zestaw rozkładów: normalny, log-normalny, Weibulla (min) oraz Gumbela (min, max) jest wystarczający dla typowych zastosowań inżynierskich w analizie niezawodności konstrukcji. Rozkłady o bardzo ciężkich ogonach (np. Pareto) nie są zazwyczaj zalecane ze względu na brak jednoznacznej interpretacji fizycznej oraz trudności numeryczne w metodach FORM/SORM.
Przykład IIa.2 [Dekorelacja wektora metodą Pugaczewa czy Cholesky 'ego ]
Przeprowadzić dekolerację wektora $\mathbf{X}$ dla którego:
wartość oczekiwana $\boldsymbol{\mu}_X = \mathbf{0}$
wektor wariancji: $\mathrm{Var}(\mathbf{X}) = \begin{bmatrix} 400 & 25 & 100 & 9\end{bmatrix}^T,$
macierz korelacji:
$ \boldsymbol{\rho}_{xx} = \begin{bmatrix} 1 & 0.5 & 0.1 & 0.2 \\ 0.5 & 1 & 0.4 & 0.2 \\ 0.1 & 0.4 & 1 & 0.5 \\ 0.2 & 0.2 & 0.5 & 1\end{bmatrix}.$
czyli macierz kowariancji
$\mathbf{C}_{xx}= Var \mathbf{X}\cdot \boldsymbol{\rho}_{xx} =
\begin{bmatrix} 400 & 50 & 20 & 12\\ 50 & 25 & 20 & 13\\ 20 & 20 & 100 & 9\\ 12 & 13 & 9 & 9 \end{bmatrix} $
Rozkład kanoniczny Pugaczewa
$\mathbf{C}_{xx} = \mathbf{A}\,\mathbf{D}\,\mathbf{A}^{\mathrm T}. $
Procedura iteracyjna ($\ref{IIa.15}$) – ($\ref{IIa.16}$) jest prowadzona następująco
$ \textbf{Iteracja $k=1$}$
d_1 = c_{11} = 400,
a_{12} = \frac{50}{400} = 0.125, \qquad a_{13} = \frac{20}{400} = 0.05, \qquad a_{14} = \frac{12}{400} = 0.03.$
$\textbf{Iteracja $k=2$}$
d_2 = c_{22} – d_1 a_{12}^2 = 25 – 400 \cdot 0.125^2 = 18.75.$
$ a_{23} =\frac{20 – 400 \cdot 0.125 \cdot 0.05}{18.75} = \frac{17.5}{18.75}=0.933333,$
$ a_{24} = \frac{13 – 400 \cdot 0.125 \cdot 0.03}{18.75} =\frac{11.5}{18.75} = 0.613333.$
$\textbf{Iteracja $k=3$}$
d_3 = 100 – 400 \cdot 0.05^2 -18.75 \cdot 0.933333^2 = 82.666667.$
$ a_{34} = \frac{9- 400 \cdot 0.05 \cdot 0.03 -18.75 \cdot 0.933333 \cdot 0.613333}{82.666667} = -0.02823.$
$\textbf{Iteracja $k=4$}$
d_4 = 9 – 400 \cdot 0.03^2 – 18.75 \cdot 0.613333^2 – 82.666667 \cdot (-0.02823)^2 =1.5208.$
$\textbf{Wyniki końcowe}$
$\mathbf{A}= [a_{ij}] \begin{bmatrix}
1 & 0 & 0 & 0 \\
0.125 & 1 & 0 & 0 \\
0.05 & 0.933333 & 1 & 0 \\
0.03 & 0.613333 & -0.02823 & 1
\end{bmatrix},$
$ \mathbf{D} = \mathrm{diag}
\left( 400,\; 18.75,\; 82.666667,\; 1.5208 \right).$
Algorytm Cholesky’ego
Rozkład: $ \mathbf{C}_{xx} = \mathbf{L}\,\mathbf{L}^{\mathrm T}.$
Procedura iteracyjna ($\ref{IIa.19}$) – ($\ref{IIa.20}$) jest prowadzona następująco
$\textbf{Iteracja $k=1$}$
$ l_{11} = \sqrt{400} = 20,$
$ l_{21} = 50/20 = 2.5,$
$l_{31} = 20/20 = 1,$
$l_{41} = 12/20 = 0.6.$
$\textbf{Iteracja $k=2$}$
$l_{22} = \sqrt{25 – 2.5^2} = \sqrt{18.75} = 4.3301,$
$l_{32} = \frac{20 – 2.5 \cdot 1}{4.3301} = 4.0415,$
$l_{42} = \frac{13 – 2.5 \cdot 0.6}{4.3301} = 2.655.$
$\textbf{Iteracja $k=3$}$
$ l_{33} = \sqrt{100 – 1^2 – 4.0415^2} = 9.092,$
$ l_{43} = \frac{9 – 1 \cdot 0.6 – 4.0415 \cdot 2.655}{9.092} =-0.257.$
$\textbf{Iteracja $k=4$}$
$ l_{44} =\sqrt{9 – 0.6^2 – 2.655^2 – (-0.257)^2}=1.235.$
$\mathbf{L} = \begin{bmatrix}
20 & 0 & 0 & 0 \\
2.5 & 4.3301 & 0 & 0 \\
1 & 4.0415 & 9.092 & 0 \\
0.6 & 2.655 & -0.257 & 1.235
\end{bmatrix}.$
Dla transformacji Cholesky’ego:
$ \mathbf{C}_{uu} = \mathbf{I}.$
Wnioski
1) Algorytm Pugaczewa i dekompozycja Cholesky’ego prowadzą do różnych reprezentacji tej samej macierzy kowariancji $\mathbf{C}_{xx}$.
2) W metodzie Pugaczewa macierz $\mathbf{D}$ zachowuje informację o „pozostałej” niezależnej wariancji w kolejnych kierunkach przestrzeni losowej, co umożliwia identyfikację zaniku informacji losowej (małe lub zerowe $d_k$).
3) W dekompozycji Cholesky’ego cała informacja losowa jest zawarta w macierzy $\mathbf{L}$, natomiast wektor $\mathbf{U}$ ma zawsze jednostkową macierz kowariancji
$mathbf{C}_{uu} = \mathbf{I}.$
4) Metoda Cholesky’ego jest numerycznie bardzo stabilna i efektywna, lecz ukrywa strukturę informacyjną problemu. Metoda Pugaczewa zachowuje tę strukturę jawnie, co czyni ją szczególnie użyteczną w analizach dynamicznych i degradacyjnych.
Przykład IIa.3 [ Porównanie metod FORM, SORM i MC dla silne nieliniowego problemu ]
Oszacować prawdopodobieństwo zniszczenia $p_f= Pr ( R – E <0)$ oraz indeks niezawodności $\beta$ dla danych podanych niżej.
Przyjąc, że zmienne R i G nie są skorelowane: $ Cov (R, \quad E) =0 $
Dane
Analiza pomiarów empirycznych o liczebności w $N$ wytrzymałości pewnej konstrukcji $R$ oraz jej obciążenia $F$ wykazała, że parametry z próby wyznaczone z zależności ($\ref{IIb.4}$) wyniosły
dla wytrzymałości (X=R): $m_R= 100$; $s_R= 10$
dla obciążeń (X=E): $m_E= 80$; $s_E= 20$
Po przeprowadzeniu testów statystycznych stwierdzono też, że:
R ma rozkład normalny $\mathcal N (\mu_N,\, \sigma_N)$ , gdzie można przyjąć: $\mu_N \approx m_R= 100$, $\sigma_N \approx s_R= 10$
E ma rozkład log-normalny $\mathcal L (\mu_L , \, \sigma_L)$, dla którego parametry wyznaczono niżej z zależności ($\ref{IIb.1}$), dla (X=E): $m_E= 80$; $s_E= 20$ , $v_E =\cfrac{1}{95}=0,25$ i stąd
($\ref{IIb.9}$) $ \to \mu_{\mathcal L } = \ln {\left (80 / \sqrt{1+ 0,25^2} \right)}= 4,352$
($\ref{IIb.8}$) $ \to \sigma_{\mathcal L }= \sqrt{ \ln { \left [1+ 0,25^2 \right] } } =0,246$.
Ponieważ zmienne $R$ i $E$ z założenia (w przykładzie) nie są skorelowane, więc nie trzeba przeprowadzać ich dekorelacji.
Metoda FORM w odmianie Rackwitz –Fiessler (RF)
Transformacja funkcji granicznej do przestrzeni $U$
Oryginalną funkcję graniczną $g(R, \, E) = R – E $
przekształcimy do U-przestrzeni, uwzględniając zależności dla rozkładu normalnego $R$:
$R = \mu_R + \sigma_R \cdot U_R$,
tego, że $ ln {E} $ jest rozłożony normalnie:
$ ln {E} = \mu_{\mathcal L} +\sigma_{\mathcal L} \cdot U_E$, czyli
$ E= exp{ \mu_{\mathcal L} +\sigma_{\mathcal L}\cdot U_E}$.
Stąd funkcja graniczna w U-przestrzeni przyjmuje postać
$g(U_R, \, U_E) = R – E = \mu_R + \sigma_R\cdot U_R – \exp{(\mu_{\mathcal L} +\sigma_{\mathcal L} \cdot U_E) }$
Powierzchnia graniczna g(…) jest liniową funkcją zmiennej $U_R$ i nieliniową zmiennej $U_E$
Gradient funkcji granicznej $\nabla g$
Składowe gradientu powierzchni granicznej ($\ref{IIa.25}$) wynoszą:
$ \cfrac{\partial g()}{\partial U_R}= \sigma_R$
$ \cfrac{\partial g()}{\partial U_E}= – \sigma_{\mathcal L} \cdot \exp{( \mu_{\mathcal L}+\sigma_{\mathcal L} \cdot U_E) }$
Wektor gradientu $\nabla g()$ ($\ref{IIa.26}$) , ($\ref{IIa.27}$) wynosi
$ \nabla g(U_R, U_E)= \begin{bmatrix} \sigma_R\\ – \sigma_{\mathcal L} \cdot \exp { (\mu_{\mathcal L}+\sigma_{\mathcal L} \cdot U_E) } \end{bmatrix}$
Norma gradientu (długość wektora) wynosi
$\parallel \nabla g (U_R, U_E) \parallel = \sqrt{ \left( \cfrac{\partial g}{\partial U_R}\right)^2+ \left( \cfrac{\partial g}{\partial U_E}\right)^2} = \sqrt{ \sigma_R^2 +[ \sigma_{\mathcal L}\cdot \exp { (\mu_{\mathcal L}+\sigma_{\mathcal L} \cdot U_E) }]^2} $
Wektor kierunkowy gradientu (normalnej do powierzchni granicznej) wynosi:
$ \alpha (U) =\cfrac{1}{\parallel \nabla g (U_R, U_E) \parallel} \cdot \nabla g(U_R, U_E)= \begin{bmatrix} \sigma_R\\ – \sigma_{\mathcal L} \cdot \exp { (\mu_{\mathcal L}+\sigma_{\mathcal L} \cdot U_E) } \end{bmatrix}$
W punkcie NPP wektor kierunkowy wynosi $\alpha^* = \alpha(U_E^*, U_E*)$
W metodzie FORM gradient $\nabla g(U)$ określa kierunek „najbardziej stromego wzrostu” funkcji granicznej, norma gradientu jest potrzebna do wyznaczenia wektora jednostkowego normalnego $\alpha$, oraz aktualizacji iteracji podczas poszukiwania punktu NPP.
Rozwiązanie problemu optymalizacyjnego do znalezienia NPP (punktu projektowego)
Punkt NPP wyznacza dominujący kierunek awarii i znajduje się przez rozwiązanie problemu optymalizacyjnego
$ \min \limits_{U=(U_R, U_E)} \cfrac{1}{2} \mathbf{U}^T\mathbf{U} $
czyli problemu
minimalizuj $\cfrac{1}{2}\parallel U \parallel^2$ przy ograniczeniu g(U)=0.
Zadanie rozwiązujemy metodą mnożników Lagrange’a $ w algorytmie iteracji ($\ref{IIb.23}$), której krok numeryczny (przy iteracji „k-tej”) w naszego przypadku przyjmuje postać:
1 oblicz $g\big(U^{(k)}\big)=\mu_R+\sigma_R U_R^{(k)}-\exp(\mu_L+\sigma_L U_E^{(k)})$,
2. oblicz gradient $\nabla g\big(U^{(k)}\big)$ i jego normę $|\nabla g\big(U^{(k)}\big)|$ (wzory powyżej).
3. oblicz $\alpha^{(k)}=\nabla g(U^{(k)})/|\nabla g(U^{(k)})|$ (wzory powyżej).,
4. zaktualizuj $ U^{(k+1)}$ (wzór wyżej).
5. sprobwdź kryteria zbieżności, np $|| U^{(k+1)} – U^{(k)} , \varepsilon _U$ oraz $| g (U^{(k+1)}) < \varepsilon_g$
Po osiągnięciu zbieżności otrzymujemy:
współrzędne punku LPP $ U^*=(U_R^*, U_E^*) = (0.501556, \,-1.897177)$.
indeks niezawodności $\beta = || U^* || = \sqrt{ U_R^{*2}+U_E^{*2}} = 1,962355$,
prawdopodobieństwo awarii $p_f \approx\Phi^{-1}(\beta) = p_f =2,486×10^{-2}
Dodatkowo uzyskano:
wektor normalny (importance factors): $α^* = (α_R^* , \, α_E^*) = (0.640881, \, -0.767640)$,
punkt projektowy w oryginalnym układzie:
$R^* = μ_R +σ_R U_R^* = 105,015561$,
$E^*=exp (μ_L+σ_L U_E^*)=48,647000=2,486×10^{-2}$
Komentarz:
w klasycznym FORM przy zbieżnym NPP oczekujemy $g(U^*)\approx 0$. W przedstawionym przebiegu iteracji wartość $g(U^)$ wyszła dodatnia i stosunkowo duża, co wynika to z prostego sposobu aktualizacji RF zastosowanego w przykładzie (bez dodatkowych modyfikacji/relaksacji) oraz z faktu, że funkcja zawiera silną nieliniowość (wykładnik). W praktyce należy: 2) oprobcować kryteria zbieżności (monitorować zarówno zmianę $U$ jak i $g$), 2) zastosować relaksację iteracji lub wariant HL–RF / Newtona, aby wymusić $g(U^*)\to 0$ dokładniej, 3) lub użyć algorytmu minimalizującego $|U|^2/2$ z ograniczeniem $g(U)=0$ (np. metoda optymalizacji z ograniczeniami ), co daje ścisłe spełnienie ograniczenia.
Metoda Hasofer-Lind-Rackwitz-Fiessler (HLRF)
Algorytm iteracyjny HLRF jest podstawą większości praktycznych implementacji FORM (w tym programów komercyjnych) i jest ulepszeniem oryginalnego algorytmu Hasofer-Lind (HL) zawierający oryginalną oryginalna definicja punktu najbardziej prawdopodobnego (NPP) w przestrzeni znormalizowanej.
Metoda HLRF : operuje w przestrzeni standardowej normalnej, iteracyjnie znajduje punkt projektowy β, nie wymagają jawnej transformacji nieliniowych rozkładów w każdym kroku,
jest stabilniejsza numerycznie niż czyste R-F przy silnie skośnych zmiennych
Klasyczna definicja indeksu Hasofera–Lind to rozwiązanie problemu
$\beta=({\min_U})||U||^T ||U|| \text { z warunkiem } g(U)=0$.
Można to sprowadzić do jednowymiarowego problemu: z warunku $g(U_1,U_2)=0$ wyznaczamy $U_2$ jako funkcję $U_1$:
$ U_2 (U_1) = \cfrac{ \ln {(m_R + s_R \cdot U_1) – \mu_{mathcal L}} {\sigma_{mathcal L}}$
z warunkiem $ m_R + s_R U_1 > 0$
gdzie zastosowano oznaczenia jak dla metody RF
Następnie minimalizujemy funkcję
$f(U_1) =\sqrt{U_1^2 + [ U_2(U_1)]^2}$
Dla przyjętych danych minimalizacja jednowymiarowa prowadzi do następującego procesu iteracyjnego
Rys. Iteracje w metodzie HLRF
Po kilkunastu iteracjach otrzymujemy punkt projektowy, indeks $\beta$ i prawdopodobieństwo zniszczenia $p_f$:
$U_{HLRF}^* \approx (-0,88889861, \, 1,11864231)$,
$\beta_{HLRF} \approx 1,4288111690$,
$p_{f, HLRF} \approx \Phi (−1,4288111690)\approx 0,07653$.
Przykład IIa.4 [ Redukcja zmiennej pierwotnej na rzecz zmiennej zastępczej dla liniowej i parabolicznej funkcji granicznej ]
Postępując czgodnie z Algorytm_wyboru_zmiennych_do_redukcji przedstawić analityczne rozwiązanie dla liniowej i parabolicznej funkcji stanu redukcji zmiennej pierwotnej $X_k$ na rzecz zmiennje zastępczej $X_j$ wektowa $\mathbf{X}$ , który został już znormalizowany do wektora $\mathbf{Z}$.
Liniowa funkcja graniczna
Rozważmy parę znormalizowanych zmiennych losowych $ \mathbf{Z}_{jk} = \begin{bmatrix} Z_j \\ Z_k \end{bmatrix}
\sim\mathcal{N} \left(\mathbf{0},\begin{bmatrix}1 & \rho \\\rho & 1\end{bmatrix}\right).$
dla obszaru zniszczenia zdefiniowanego funkcją graniczną liniową (prostą)
$ g(Z_j,Z_k) = a Z_j + b Z_k + c \le 0,$
gdzie $a,b,c \in \mathbb{R}$ oraz $(a,b)\neq(0,0)$.
Transformacja do zmiennej skalarnej
Definiujemy zmienną losową $ Y = a Z_j + b Z_k.$
Ponieważ $\mathbf{Z}_{jk}$ ma rozkład normalny, zmienna $Y$ również ma rozkład normalny:
$ Y \sim \mathcal{N}(0,\sigma_Y^2),$
gdzie wariancja wynosi $ \sigma_Y^2 = a^2 + b^2 + 2ab\rho.$
Prawdopodobieństwo zniszczenia (referencyjne)
Zdarzenie zniszczenia ma postać $ \mathcal{F} = \{ Y \le -c \}.$
Prawdopodobieństwo zniszczenia wynosi zatem: $ P_f^{(jk)} = \mathbb{P}(Y \le -c) = \Phi\!\left( -\frac{c}{\sqrt{a^2 + b^2 + 2ab\rho}}\right).$
Jest to dokładna, analityczna postać miary probabilistycznej obszaru zniszczenia w przestrzeni $(Z_j,Z_k)$.
Model po eliminacji zmiennej $Z_k$
Eliminację zmiennej $Z_k$ modelujemy przez jej warunkowanie w wartości centralnej: $Z_k = 0.$
Funkcja graniczna redukuje się do $ g(Z_j,0) = a Z_j + c \le 0.$
Zdarzenie zniszczenia $ \mathcal{F}_j = \{ Z_j \le -c/a \}.$
Prawdopodobieństwo zniszczenia po eliminacji wynosi: $ P_f^{(j)} = \Phi\left( -\frac{c}{|a|}\right).$
Funkcjonał utraty informacji
Definiujemy funkcjonał utraty informacji $ \mathcal{L}_{k \to j} = \left| \Phi\!\left( -\frac{c}{\sqrt{a^2 + b^2 + 2ab\rho}}\right) -\Phi\!\left(-\frac{c}{|a|}\right)\right|.$
Funkcjonał ten: zależy wyłącznie od $(a,b,c)$ oraz korelacji $\rho$ ; est całkowity (niepunktowy); mierzy dokładną utratę miary probabilistycznej.
Warunek dokładnej eliminacji
Zmienna $Z_k$ może zostać wyeliminowana bez utraty informacji o niezawodności wtedy i tylko wtedy, gdy: $b = 0.$
Wówczas $\mathcal{L}_{k \to j} = 0\quad \forall \rho.$
Zmienna zastępcza (agregacja liniowa)
Jeżeli $b \neq 0$, wprowadzamy zmienną zastępczą $ Z_j^\ast = Z_j + \alpha Z_k.$
Funkcja graniczna przyjmuje postać $ g(Z_j^\ast) = a Z_j^\ast + c \le 0.$
Warunek zachowania wariancji projekcji $\mathrm{Var}(a Z_j^\ast) = a^2 (1 + 2\alpha\rho + \alpha^2)=a^2 + b^2 + 2ab\rho.$
Rozwiązanie względem $\alpha$ $ \alpha^2 + 2\rho\alpha – \frac{b^2 + 2ab\rho}{a^2} = 0.$
Jedno z rozwiązań: $ \alpha = -\rho + \sqrt{\rho^2+\frac{b^2 + 2ab\rho}{a^2}}.
Dla tak zdefiniowanej zmiennej zastępczej zachodzi: $ P_f^{(j^\ast)} = P_f^{(jk)}.$
Agregacja jest zatem dokładna w sensie miary probabilistycznej obszaru zniszczenia.
Paraboliczna funkcja graniczna
Niech $ \mathbf{Z} = \begin{bmatrix} Z_j \\ Z_k \end{bmatrix} \sim \mathcal{N} \left(\mathbf{0},\begin{bmatrix}1 & \rho \\\rho & 1\end{bmatrix}\right).$
Rozważmy funkcję graniczną drugiego rzędu (parabolę): $ g(Z_j,Z_k) = a Z_j^2 + b Z_j Z_k + c Z_k^2 +d Z_j +e Z_k +f \le 0,$
gdzie macierz kwadratowa
$ \mathbf{Q} = \begin{bmatrix} a & b/2 \\ b/2 & c \end{bmatrix}$
jest dodatnio określona (obszar zniszczenia jest ograniczony).
Postać kwadratyczna
W zapisie macierzowym $ g(\mathbf{Z}) = \mathbf{Z}^\mathrm{T}\mathbf{Q}\mathbf{Z} + \mathbf{q}^\mathrm{T}\mathbf{Z} +f, \qquad \mathbf{q} =\begin{bmatrix}d \\
e\end{bmatrix}.$
Zdarzenie zniszczenia $ \mathcal{F} = \left\{\mathbf{Z} : \mathbf{Z}^\mathrm{T}\mathbf{Q}\mathbf{Z} + \mathbf{q}^\mathrm{T}\mathbf{Z}+f \le 0\right\}.$
Ukośna transformacja Gaussa
Wprowadzamy transformację afiniczną: $ \mathbf{Z} = \mathbf{L}\mathbf{U}, \qquad \mathbf{L}\mathbf{L}^\mathrm{T}= \begin{bmatrix}1 & \rho \\\rho & 1\end{bmatrix},$
gdzie $\mathbf{U}\sim\mathcal{N}(\mathbf{0},\mathbf{I})$.
Po transformacji
$ g(\mathbf{U}) = \mathbf{U}^\mathrm{T} \mathbf{Q}^\ast \mathbf{U} + \mathbf{q}^{\ast\mathrm{T}}\mathbf{U} + f,$
gdzie $ \mathbf{Q}^\ast = \mathbf{L}^\mathrm{T}\mathbf{Q}\mathbf{L}, \qquad \mathbf{q}^\ast = \mathbf{L}^\mathrm{T}\mathbf{q}.$
Diagonalizacja części kwadratycznej
Macierz $\mathbf{Q}^\ast$ jest symetryczna, zatem istnieje ortogonalna macierz $\mathbf{R}$ taka, że:
$ \mathbf{R}^\mathrm{T}\mathbf{Q}^\ast\mathbf{R} = \begin{bmatrix} \lambda_1 & 0 \\
0 & \lambda_2 \end{bmatrix}, \qquad \lambda_1,\lambda_2>0.$
Definiujemy $ \mathbf{V} = \mathbf{R}^\mathrm{T}\mathbf{U}, \qquad \mathbf{V}\sim\mathcal{N}(\mathbf{0},\mathbf{I}).$
W nowych współrzędnych $ g(\mathbf{V}) = \lambda_1 V_1^2+ \lambda_2 V_2^2 + \beta_1 V_1 + \beta_2 V_2 + f.$
Domknięcie kwadratu
$ g(\mathbf{V}) = \lambda_1 (V_1 + \delta_1)^2 + \lambda_2 (V_2 + \delta_2)^2 – r^2, $
gdzie: $ \delta_i = \frac{\beta_i}{2\lambda_i}, qquad r^2 = \frac{\beta_1^2}{4\lambda_1} +\frac{\beta_2^2}{4\lambda_2} -f.$
Zdarzenie zniszczenia przyjmuje postać elipsy:
$ \mathcal{F} = \left\{ \lambda_1 (V_1 + \delta_1)^2 +\lambda_2 (V_2 + \delta_2)^2 \le r^2\right\}.$
Prawdopodobieństwo zniszczenia
Po przesunięciu środka: $ W_i = V_i + \delta_i, \qquad \mathbf{W}\sim\mathcal{N}(\boldsymbol{\delta},\mathbf{I}).$,
definiujemy zmienną $ T = \lambda_1 W_1^2 + \lambda_2 W_2^2.$
Wówczas: $ P_f = \mathbb{P}(T \le r^2).$
Zmienna $T$ ma rozkład \textit{niecentralnego ważonego rozkładu chi-kwadrat}.
Jej dystrybuanta $ P_f = F_T(r^2) $ nie ma zamkniętej postaci elementarnej. Może być jednak zapisana analitycznie jako: całka jednowymiarowa, szereg nieskończony (postacie Laguerre’a) lub funkcja specjalna (Marcum-Q).
Wnioseki
Dla funkcji granicznej kwadratowej
- redukcja do 2D GausI.8 sa jest w pełni analityczna,
- geometria obszaru zniszczenia jest dokładnie znana,
- brak postaci elementarnej dystrybuanty jest własnością matematyczną rozkładu, a nie ograniczeniem algorytmu.
Przykład IIa.5 [Obciążenie śniegiem jako zmienna losowa – rozkład Weibulla max, Gumbel max oraz Gauss ]
W dalszej analizie obciążenie śniegiem traktuje się jako ekstremum maksymalne procesu losowego w czasie. Rozpatrzymy rozkłąd Weibulla max ,a także alternatywnym do tego rozkładu rozkład Gumbla max (EV1), powszechnie stosowane do opisu maksymalnych wartości obciążeń środowiskowych w zadanym okresie odniesienia. w zadanym okresie odniesienia $T$. Zmienna ta odpowiada maksymalnemu obciążeniu śniegiem w okresie powrotu $T$ , który dla zwykłych konstrukcji przyjmuje się jako $T = 50 lat$. Porównawczo rozpatrzymy t ż rozkład Gaussa w podejściu kwanrtylowym, a nie nominalnym.
Normowe obciążenie śniegiem nie jest wartością średnią ani oczekiwaną, lecz kwantylem rozkładu ekstremalnego odpowiadającym zadanemu okresowi powrotu.
Przykłąd liczbowy zaprezentowano w przykładzie 10 dla normowej wartości charakterystycznej wartość $S_{50} = 0{,}9 \cdot 0{,}8 \cdot 6{,}0 = 4{,}32\ \mathrm{kN/m}$., która w istocie nie jest wartością średnią ani charakterystyczną w sensie statystycznym, lecz kwantylem rozkładu ekstremalnego rzędu $p_T = 1 – 1/T = 1 – 1/50= 0.98.$
Parametry rozkładu śniegu – Weibull max
Obciążenie śniegiem jest traktowane jako ekstremum maksymalne procesu losowego w czasie w modelu probabilistycznym rozkładu Weibulla max (prawostronny), którego dystrybuanta ma postać
$F_S(s) = 1 – exp[ – (\cfrac{s}{ \lambda_S})^{k_S} ],$
gdzie:
$k_S$ – parametr kształtu,
$\lambda _S$ – parametr skali,
s – realizacja zmiennej losowej obciążenia śniegiem S.
Rząd kwantyla wynikający z okresu powrotu T
Z definicji okresu powrotu otrzymujemy
$p_T = F_S (s_T) = 1 – 1/T$.
Dla T = 50 lat: $p_T = 0,98$.
Dobór parametru kształtu k_S
Parametr kształtu k_S nie może zostać wyznaczony na podstawie pojedynczego kwantyla. Musi zostać przyjęty na podstawie danych klimatycznych, doświadczenia inżynierskiego oraz zaleceń literaturowych.
Dla obciążeń śniegiem typowe wartości mieszczą się w przedziale
$k_S = 1.5 ÷ 3.0$.
W przykładach liczbowych przyjmuje się wartość pośrednią
$k_S = 2.0$.
Wyznaczenie parametru skali λ_S
Z równania kwantyla
$p_T = 1 – exp – \left ( \cfrac{s_T}{\lambda_S} \right )^{k_S} $
po przekształceniu otrzymujemy
$ \lambda_S = s_T / [ – ln(1 – p_T) ]^{1/k_S}$.
Podstawiając dane liczbowe $p_T=0,98$ , wyznaczamy $\lambda_S = 4.32 / [-ln (1-0,98)]^{1/2} = 2.18 kN/m.
Ostateczna postać rozkładu Weibulla max
$S ~ Weibull_max( k_S = 2.0 , \lambda_S = 2.18 kN/m ).$
Powiązanie z parametrami z próby – współczynnik zmienności
Współczynnik zmienności rozkładu Weibulla max wynosi
$ v_S = sqrt( Γ(1 + 2/k_S) / Γ^2(1 + 1/k_S) – 1 )$.
Dla $k_S = 2.0$
$ v_S = sqrt( Γ(1 + 2/k_S) / Γ^2(1 + 1/2) – 1 )= 0,52$.
Oznacza to bardzo dużą zmienność obciążenia śniegiem, typową dla zjawisk klimatycznych o charakterze ekstremalnym.
Dla porównania, powszechnie przyjmowany współczynnik zmienności $v_S = 0.15$ odpowiada rozkładom zbliżonym do normalnych i nie opisuje poprawnie zachowania ogona ekstremalnego.
W modelu dynamicznym niezawodności nie wymaga się zgodności z chwilową próbą obserwacyjną, lecz poprawnego odwzorowania zachowania ogona rozkładu, który decyduje o bezpieczeństwie konstrukcji.
Uwaga metodologiczna – przejście od modelu ekstremalnego
do zmiennej losowej używanej w analizie niezawodnościowej
W metodach FORM/HL, metodach binarnych oraz w modelu dynamicznym wartość $S_50$ stanowi punkt odniesienia do wyznaczenia prawdopodobieństwa przetrwania p_s(t) oraz współczynnika niezawodności β(t).
Parametry rozkładu śniegiem – Gumbel max (EV1)
Przyjmuje się okres powrotu również $T = 50 lat$.
Dystrybuanta rozkładu Gumbla max
$F_S(s) = exp{ – exp[ – (s – μ_G) / β_G ] }$
gdzie:
μ_G – parametr lokalizacji,
β_G – parametr skali (β_G > 0),
s – realizacja zmiennej losowej obciążenia śniegiem S.
Rząd kwantyla i zależość kwantylowa
Dla rozkładu Gumbla max kwantyl rzędu p_T spełnia zależność
$s_p = μ_G – β_G \cdot ln[ – ln(p_T) ]$.
Dla p_T = 0.98 otrzymujemy $s_{50} = μ_G + 3.902 \cdot β_G$
Wyznaczenie parametrów rozkładu
Ponieważ pojedynczy kwantyl nie wystarcza do jednoznacznego wyznaczenia parametrów μ_G i β_G, konieczne jest przyjęcie dodatkowej informacji. to w analizie inżynierskiej najczęściej przyjmuje się współczynnik zmienności obciążenia śniegiem.
Przyjmując $v_S = 0.15$, dla rozkładu Gumbla max zachodzą zależności:
$E[S] = μ_G + γ * β_G$,
$Var[S] = (π^2 / 6) * β_G^2$,
gdzie γ = 0.5772 jest stałą Eulera–Mascheroniego.
Współczynnik zmienności rozkładu $v_S = sqrt(Var[S]) / E[S]$.
Wyznaczenie parametru skali β_G
Podstawiając do powyższych zależności $v_S = 0.15$, otrzymujemy równanie:
$0.15 = ( (π / sqrt(6)) * β_G ) / ( μ_G + γ * β_G )$.
Rozwiązując układ równań wspólnie z warunkiem kwantylowym $S_50 = μ_G + 3.902 * β_G = 4.32$, otrzymujemy:
$β_G ≈ 0.39 kN/m$,
$μ_G ≈ 2.80 kN/m$.
Ostateczna postać rozkładu Gumbla max
S ~ Gumbel_max( μ_G = 2.80 kN/m , β_G = 0.39 kN/m ).
Współczynnik zmienności
Dla przyjętych parametrów:
E[S] = μ_G + γ * β_G = 2.80 + 0.5772 * 0.39 ≈ 3.03 kN/m,
$\sigma_S = (π / sqrt(6)) * β_G ≈ 0.50 kN/m$,
v_S = 0.50 / 3.03 ≈ 0.165.
Otrzymana wartość współczynnika zmienności jest zgodna z przyjętym poziomem zmienności obciążenia śniegiem w analizach inżynierskich.
Znaczenie dla dalszej analizy niezawodności
Przyjęcie rozkładu Gumbla max oznacza, że obciążenie śniegiem jest modelowane bezpośrednio jako ekstremum maksymalne w zadanym okresie odniesienia. Rozkład ten posiada wykładniczy ogon, mniej ciężki niż w przypadku rozkładu Weibulla max o k_S < 2, lecz wyraźnie odmienny od rozkładu normalnego.
Rozkład Gaussa kwantylowy
Wartość normowa nie jest interpretowana jako wartość oczekiwana, lecz jako kwantyl rozkładu odpowiadający zadanemu okresowi powrotu T. Przy założeniu $T = 50 lat$,
rząd kwantyla wynosi $p_T = 1 – 1/T = 0.98$.
W przykłazie10 – wartość normowa obciążenia śniegiem
$s_50 = s_k · μ · a = 0.9 · 0.8 · 6.0 = 4.32 kN/m$
Przyjmujemy, ż $S ~ N(μ_S, σ_S^2)$, oraz że wartość normowa S_50 jest kwantylem rzędu $p_T$, czyli
$s_50 = μ_S + z_{p_T} · σ_S$
gdzie:
$z_{p_T} = Φ^{-1}(0.98) = 2.0537$
W praktyce inżynierskiej dla obciążenia śniegiem często przyjmuje się współczynnik zmienności obciązenia śneigiem $v_S = 15$ %
Z równania kwantylowego:
$S_50 = μ_S + z_{0.98} · v_S · μ_S,
$μ_S = s_50 / (1 + z_{0.98} · v_S)$
mamy
$μ_S (1 + z_{0.98} · v_S) = S_50$
Podstawiając liczby:
$ μ_S = 4.32 / (1 + 2,0537 \cdot 0.15)= 3.30 kN/m$
σ_S = v_S · μ_S = 0.15 · 3.30 = 0.495 kN/m
Ostatecznie:
S ~ \cal N (3.30 ; 0, 495^2) [kN/m]$
Uwaga:
1) Rozkład Gaussa jest symetryczny i nieograniczony, co oznacza możliwość realizacji ujemnych wartości S. Z tego względu ma on jedynie charakter przybliżony.
2) Przyjęcie wartości normowej jako kwantyla powoduje „przesunięcie” średniej w dół względem wartości normowej.
3) Rozkład normalny nie odwzorowuje poprawnie ogona ekstremalnego, a więc systematycznie zaniża prawdopodobieństwo zdarzeń rzadkich,
4) W metodach FORM/HL rozkład Gaussa prowadzi zwykle do większych współczynników niezawodności β w porównaniu z Weibull max i Gumbel max.
5) Rozkład Gaussa może być stosowany jako : model referencyjny, do analiz porównawczych, w stanach użytkowalności o niskiej wrażliwości na ogon rozkładu. Nie jest natomiast zalecany jako model podstawowy dla ekstremalnych oddziaływań środowiskowych.
Porównanie. Znaczenie wyboru rozkładu obciążenia śniegiem
W Przykładzie obciążenie śniegiem S zostało opisane trzema alternatywnymi modelami probabilistycznymi: rozkładem Gaussa, rozkładem Gumbla max oraz rozkładem Weibulla max. Każdy z tych modeli spełnia formalnie warunek odtworzenia tej samej wartości normowej S_T jako kwantyla rzędu p_T = 1 − 1/T, lecz prowadzi do zasadniczo odmiennej interpretacji ryzyka oraz odmiennych parametrów losowych.
Wspólnym punktem odniesienia jest wartość normowa
s_T = 4.32 kN/m,
która w każdym z modeli traktowana jest jako kwantyl, a nie jako wartość oczekiwana.
W modelu Gaussa:
1) wartość S_T spełnia relację s_T = μ_S + z_p \cdot σ_S$.
2) przy przyjętym współczynniku zmienności v_S = 15% prowadzi to do średniej μ_S znacząco mniejszej od s_T,
3) w konsekwencji ogon prawy rozkładu zanika wykładniczo, prawdopodobieństwa ekstremów są silnie niedoszacowane, współczynnik niezawodności β jest systematycznie zawyżony,
model nie posiada interpretacji ekstremalnej,
4) rozkład Gaussa może być stosowany jedynie jako: – model referencyjny, przybliżenie w analizach użytkowalności, – punkt odniesienia porównawczego i nie jest on właściwym modelem maksymalnych oddziaływań środowiskowych.
W modelu Gumbla max:
1) wartość normowa s_T jest dokładnie interpretowana jako $s_T = μ_G − β_G ln[−ln(p_T)]$.
2) w konsekwencji: rozkład posiada asymetrię prawostronną, ogon jest cięższy niż w Gaussie, lecz lżejszy niż w rozkładzie Weibulla, a ekstremalne realizacje są bardziej prawdopodobne niż w Gaussie, model jest naturalny dla rocznych maksimów oddziaływań klimatycznych.
3) rozkład Gumbla max stanowi rozsądny kompromis pomiędzy: realizmem ekstremalnym, prostotą analityczną, stabilnością obliczeń
Delegacja do przykładu 10
W tym przykładzie (9.tym) obciążenie śniegiem S zostało opisane jako ekstremum maksymalne procesu losowego w czasie, odpowiadające okresowi powrotu T = 50 lat. Na tym poziomie modelowania zmienna S reprezentuje maksymalne oddziaływanie środowiskowe w danym horyzoncie czasowym, a jej rozkład (Weibull max, Gumbel max lub Gauss kwantylowy) ma charakter globalny i dotyczy ogona rozkładu.
Parametr kształtu rozkładu Weibulla max przyjęty w tym kontekście (k_S = 2.0) opisuje ciężki ogon rozkładu ekstremalnego i jest właściwy dla modelowania rzadkich, lecz decydujących zdarzeń klimatycznych.
Natomiast w przykładzie liczbowym 10 nie operuje się jednak bezpośrednio na rozkładzie ekstremum w całym jego zakresie, lecz na zmiennej losowej występującej lokalnie w funkcji granicznej, w otoczeniu najbardziej prawdopodobnego punktu zniszczenia (NPP). Oznacza to przejście z opisu globalnego (ogon rozkładu, ekstrema czasowe), do opisu lokalnego (zmienność w otoczeniu punktu obliczeniowego). Z tego względu w Przykładzie 10 stosuje się zmienną losową S o tym samym punkcie odniesienia S_50, lecz o „złagodzonym” kształcie rozkładu, odpowiadającym aproksymacji lokalnej.
Formalnie oznacza to zastąpienie rozkładu Weibulla max o parametrze k_S = 2.0 rozkładem Weibulla o większym parametrze $k_{Weibull}=7,0$, przy zachowaniu tego samego kwantyla rzędu p_T = 0.98. Kalibracja zmiennej losowej S na użytek Przykładu 10.
$S_50 = 4.32 kN/m$,
$p_T = 0.98$.
$ k_S =k_{lokal}= k{Weibull = 7.0$,
Ten rozkład:
- ma skończone momenty niskich rzędów,
- jest numerycznie stabilny w FORM/HL,
- lokalnie jest zbliżony do rozkładu normalnego,
- nie opisuje już ogona ekstremalnego, lecz zmienność w otoczeniu punktu krytycznego.
Parametr skali $λ_{lokalny} wyznacza się z warunku kwantylowego
$p_T = 1 – exp[ – ( S_50 / λ_loc )^{k_l{lokal} ]$,
stąd
$\lamdda_{lokalny} = S_50 / [ -ln(1 – p_T) ]^{1/k_{loklany}}.
Dla p_T = 0.98 oraz k_{lokalny} = 7.0 otrzymujemy:
-ln(1 – 0.98) = 3.912,
λ_loc = 4.32 / (3.912)^{1/7}
= 4.32 / 1.215
≈ 3.56 kN/m.
Ostatecznie, w przykładzie 10, zmienna losowa S jest opisana rozkładem:
$S_{lokalny} ~ Weibull( k = 7.0 , λ = 3.56 kN/m )$.
Interpretacja fizyczna i probabilistyczna
- Rozkład z k = 2.0 opisuje ekstremum klimatyczne w skali czasu.
- Rozkład z k = 7.0 opisuje lokalną zmienność obciążenia w analizie niezawodnościowej.
- Oba rozkłady są skalibrowane do tego samego poziomu ryzyka poprzez wspólny kwantyl s_50.
- Różnica dotyczy wyłącznie charakteru ogona, a nie punktu odniesienia.
Świadome przejście pomiędzy dwoma poziomami opisu losowości: ekstremalnym i lokalnym – jest spójne zarówno z teorią wartości ekstremalnych, jak i z geometrią metod niezawodnościowych typu FORM/HL, w których decydujące znaczenie ma lokalne zachowanie rozkładu w otoczeniu punktu krytycznego.
Przykład IIa.6 [ Niezawodność belki z dwoma mechanizmami zniszczenia. Metoda FORM HL ]
Wyznaczyć niezawodność belki pokazane na rys. P10-1. Zastosować metodę FORM w ujęciu Hasofera–Linda (HL), osobno dla dwóch mechanizmów zniszczenia $M1$ i $M2$, opisanych niżej. Zidentyfikować najbardziej prawdopodobny punkt zniszczenia (NPP) dla obu mechanizmów oraz oszacować współczynnik niezawodności$\beta_{HL}$ dla całej konstrukcji.
Rys. P10-1 Schemat belki do obliczeń niezawodności metodą FORMDane i model mechaniczny
Rozpatruje się swobodnie podpartą belkę stalową o nominalnej rozpiętości $ L = 6.0\ \mathrm{m}.$
Odchyłkę rozstawu podpór przyjmuje się zgodnie z klasą wykonania EXC2: $ \Delta L = \pm 10\ \mathrm{mm}.$
Przekrój poprzeczny
Belka wykonana jest z dwuteownika IPE~240, o osi głównej zginania $y$–$y$, o nominalnych charakterystykach geometrycznych:
$ A = 39.1\ \mathrm{cm^2}, \qquad I_y = 3892\ \mathrm{cm^4}, \qquad W_{pl,y} = 366.6\ \mathrm{cm^3}, \qquad m = 30.7\ \mathrm{kg/m}.$
Odchyłki hutnicze przyjmuje się jako losowe: $ v_A = 4\%, \qquad v_m = 4\%, \qquad v_I = 5\%.$
Materiał
Stal konstrukcyjna S235: $ f_y = 235\ \mathrm{MPa}, \qquad E = 210\ \mathrm{GPa}.$
Współczynnik zmienności parametrów materiałowych (z badań): $ V_m = 5\%.$
Obciążenia stałe
Ciężar własny belki: $g_{sw} = \frac{30.7 \cdot 9.81}{1000} =0.301\ \mathrm{kN/m}. $
Obciążenia stałe powierzchniowe:
$g_{pokrycie} = 0.4\ \mathrm{kN /m^2}$,
$g_{sufit} = 0.3\ \mathrm{kN/m^2}$,
$g_{inst} = 0.2\ \mathrm{kN/m^2}$
Szerokość pasa zbierania obciążeń: $ a = 6.0\ \mathrm{m}.
$Łączne obciążenie stałe liniowe $ G= 0.301 +6.0 \cdot (0.4 + 0.3 + 0.2) =5.7\ \mathrm{kN/m}. $
Współczynnik zmienności $ v_G = 7\%.$
Obciążenie śniegiem
Śnieg — wariant nominalny (nie kwantyl): $ s_k = 0.9\ \mathrm{kN/m^2}, \qquad \mu = 0.8. $
Obciążenie liniowe od śniegu $ S = 0.9 \cdot 0.8 \cdot 6.0 = 4.32\ \mathrm{kN/m}.$
Współczynnik zmienności: $ v_S = 15\%.$
$$
Obciążenie całkowite $ Q = G + S.$Projekt belki wg Eurokodu 3 [162]
Najpierw wykonamy projekt belki stalowej zgodnie z zasadami normowymi [162].
Belka o schemacie i przekroju pokazanym na rys. P10-1 jest zabezpieczona przed zwichrzeniem.
Kombinacje obciążeń przyjęto zgodnie z zasadami kombinacyjnymi PN-EN 1990 [163]:
stan graniczny nośności SGN:
$\mathbf {SGN_G}= 1,35 G + 1,5 \cdot 0,5 S$,
$\mathbf {SGN_S}= 1,35 \cdot 0,85 G + 1,5 \cdot 0,5 S$,
stan graniczny użytkowalności (ugięcia) SGU :
ugięcie chwilowe
$\mathbf {SGU_{ch}= 1,0 G + 1,0 S$
ugięcie częste
$\mathbf {SGU_{cz}= 1,0 G + 1,0 \cdot 0,2 S$
Dopuszczalne ugięcia projektant przyjął po przeprowadzeniu analizy wymagań funkcjonalnych i przyjął o następujących wartościach:
- dla sytuacji chwilowego obciążenia śniegiem SGU1 – z warunku tworzenia się lokalnych wgłębień połaci dachu oraz nie przekroczenia warunku mechaniki „małych” przemieszczeń:
$f_{dop,ch} = L/250$, - dla sytuacji obciążenia częścią częstą śniegu SGU2, który może być przekroczony 4. razy w czasie użytkowania konstrukcji i jest wydzielany z obciązenia śniegu współczynnikiem redukcyjnym $\Psi_1=0,2$
$f_{dop,cz} = L/400$,
które uwzględnia wymagania elementów ułożonych na i pod konstrukcją, a w tym wrażliwość na ugięcia belki lekkiej konstrukcji sufitu podwieszonego oraz podwieszonych instalacji .
Po przeprowadzeniu obliczeń I rzędu uzyskano wyniki:
SGN: wytężenie przekroju w środku rozpiętości belki
w = 68,1 %,
W wytężeniu uwzględniono wszystkie warunki wytrzymałościowe przewidziane w normie [162]. Warunkiem decydującym była nośność konserwatywna w interakcji (nośność plastyczna przekroju), czyli $M_E \le M_R$
SGU1ch:
$f_{ch}= 20,6 mm = \mathbf{L/291} < f_{dop, ch} = \mathbf{ L/250} \to w= 250/291 = 85.9 \%$
SGUcz\to ;
$f_{cz} = 13,5, mm = \mathbf{ L/444} < f_{dop,cz} = \mathbf { L/400} \to w= 400/444 =90,0 \%$
Belka spełnia wszystkie warunki normowe dla częściowych współczynników bezpieczeństwa odpowiadających docelowej niezawodności $\beta\ge $ 3,8
W projekcie belki Eurokod zdefiniowano trzy mechanizmy zniszczenia: M1=SGN, M2a=SGUcz, M2b=SGUch :
M1 = SGN mechanizm nośnościowy (ULS) (zniszczenie / utrata bezpieczeństwa),
M2a = SGU chwilowe użytkowalność chwilowa, odpowiada ekstremalnemu oddziaływaniu śniegu,
M2b = SGU częste użytkowalność długotrwała / często występująca, odpowiada warunkowaniu czasowemu (Ψ₁ = 0,2),
Mechanizmy M2a i M2b fizycznie dotyczą tego samego zjawiska – ugięcia belki, czyli w istocie jest to jeden mechanizm fizyczny, a dwa reżimy probabilistyczne
Identyfikacja modelu probabilistycznegoMechanizmy zniszczenia
Definiujemy dwa mechanizmy zniszczenia
$\textbf{M1 -mechanizm nośnościowy }$
z funkcją stanu granicznego
$ g_{M1} = M_R – M_E,$
gdzie: $ M_E = \frac{Q L^2}{8}, \qquad M_R = W_{pl,y} f_y.$
$\textbf{M2 – mechanizm ugięcia )} $ $M= (M_{ch} ∪ M_{cz})$,
z funkcją stanu granicznego:
$ g_{M2} = \min { \{g_{M2a}, \{g_{M2b} \}}$ , w którym awaria SGU następuje, jeżeli którekolwiek kryterium ugięcia nie jest spełnione.
gdzie:$ g_{M2a} = f_{dop, ch} – f _{chw} (\mathbf {X})$
$ g_{M2b} = f_{dop, cz} – f _{cz}(\mathbf {X})$
$f_dop$} – graniczne ugięcie „normowe” – jest faktycznie ustalane przez projektanta po uwzględnieniu funkcjonalności konstrukcji i powiązanych z nią elementów budowli:
$f_{dop, ch} =L/250}$
$f_{dop, cz =L/400}$
Strzałkę ugięcia belki swobodnie podpartej można wyznaczyć z formuły mechaniki budowli:
$ f = \frac{5}{384} \cdot \frac{Q L^4}{E I_y},
gdzie $Q = G +\alpha \cdot S_{max}$
$\begin{cases}
\alpha 1,0 \text{w mechanizmie M2a – chwilowe obciążenie śniegiem } \\
\alpha 0,0 \text{w mechanizmie 2b – częste obciążenie śniegiem } \\
\end{cases} $
Oba mechanizmy M2a i M2b są jednym mechanizmem M2, obserwowanym w dwóch „przekrojach czasowych”. Różnica pomiędzy nimi nie ma charakteru mechanicznego, lecz wynika z odmiennej interpretacji oddziaływań zmiennych jako procesów losowych w czasie.
Zdefiniowany Wektor zmiennych stanu
Na etapie identyfikacji modelu niezawodnościowego konstrukcji wprowadzono wektor zmiennych losowych zdefiniowanych:
$ \mathbf{XO} = \left[ XO_1 = L ,\, XO_2 = m L ,\, XO_3 = G L ,\, XO_4 = S L ,\, XO_5 = A L ,\, XO_6 = I_y \\ XO_7 = f_y L ,\, XO_8 = E \right]^T ,$
który obejmuje wszystkie wielkości losowe występujące explicite w opisie geometrycznym, materiałowym i obciążeniowym belki.
Redukcja zmiennych stanu fizyczna i geometryczna
Przeprowadzimy redukcję wektora zmiennych losowych $\mathbf{XO}$ zgodnie z warunkiem istotności ($\ref{IIc.1}$), tj. na podstawie wpływu zmiennych na miarę probabilistyczną obszaru zniszczenia.
W analizowanym przykładzie funkcje graniczne mają postać:
$ g_{M1}(\mathbf{X}) = f_y\,W_{pl}(A)- \frac{(G+S)L^2}{8},$
$ g_{M2}(\mathbf{X}) = \frac{L}{350} – \frac{5}{384} \, \frac{(G+S)L^4}{E\,I_y}.$
Z analizy struktury tych funkcji wynika, że:
- $m$ nie występuje niezależnie w żadnej funkcji granicznej,
- zmienna $G$ nie jest zmienną pierwotną, lecz wielkością pochodną,
- zmienne $A$, $I_y$ oraz $W_{pl}$ są powiązane relacjami geometrycznymi przekroju,
- zmienna $E$ w mechanizmie $M2$ występuje wyłącznie jako parametr materiałowy o słabym wpływie względnym.
Eliminacja zmiennej $m$
Masa belki $m$ nie oddziałuje bezpośrednio na żaden mechanizm zniszczenia, lecz wpływa na konstrukcję wyłącznie poprzez obciążenie stałe:
$ G = m \cdot g + G_{\text{pozostałe obciążenia stałe}}.$. Zmienna $m$ jest zatem nośnikiem losowości, która w całości została już przeniesiona do zmiennej $G$.
W konsekwencji $m$ oraz $G$ są silnie skorelowane funkcyjnie: $ \mathrm{Corr}(m,G) \approx 1.$
Jednoczesne traktowanie zmiennych $m$ oraz $G$ jako niezależnych zmiennych losowych prowadziłoby do nadmiarowości informacyjnej w sensie probabilistycznym,
ponieważ $m$ nie wnosi nowej losowości poza tą, która została już uwzględniona w parametrach zmiennej $G$.
Zmienna $m$ zostaje zatem wyeliminowana z wektora stanu, a jej wpływ jest w pełni zawarty w zmiennej $G$.
Charakterystyki geometryczne $A, \, I_y, \, W_{pl}$
Charakterystyki geometryczne przekroju $A$, $I_y$ oraz $W_{pl}$ nie są losowo niezależne, lecz powiązane relacjami wynikającymi z geometrii dwuteownika walcowanego.
W szczególności: $
$I_y = I_y(A) \qquad W_{pl} = W_{pl}(A).$
W modelu rzeczywistym relacje te nie mają charakteru ściśle deterministycznego. Odchyłki hutnicze powodują, że pomiędzy zmiennymi $A$ oraz $I_y$ istnieje silne, lecz niepełne powiązanie statystyczne. Na podstawie danych technologicznych oraz badań współzmienności przekrojów walcowanychprzyjmujemy:
$ \mathrm{Corr}(A,I_y) = 0.8. $
Pozostawienie w wektorze stanu jednocześnie zmiennych losowych $A$ oraz $I_y$ nie wynika wprost z formalnego kryterium $\partial g / \partial X_i \neq 0$, które stanowi warunek konieczny istotności zmiennej, lecz nie jest warunkiem wystarczającym do jej eliminacji lub zachowania. Decyzja ta wynika z analizy wpływu zmiennych na miarę probabilistyczną obszaru zniszczenia dla obu mechanizmów. Eliminacja zmiennej $I_y$ i sprowadzenie opisu ugięcia wyłącznie do zmiennej $A$ prowadziłoby do:
- sztucznego sprzężenia mechanizmu $M2$ (ugięcie) z mechanizmem $M1$ (nośność),
- systematycznego niedoszacowania zmienności ugięcia,
- zawyżenia indeksu niezawodności $\beta$, dla mechanizmu $M2$,
- przesunięcia najbardziej prawdopodobnego punktu zniszczenia w kierunku „nośności” zamiast „sztywności”.
Z punktu widzenia integralnej miary niezawodności taka redukcja prowadziłaby do istotnej utraty informacji o zachowaniu konstrukcji w stanie użytkowalności.
Wektor stanu po I etapie redukcji
Po pierwszym etapie redukcji zmiennych systemu przyjęto następujący wektor stanu:
$ \mathbf{X} = \left[X_1 = L,\; X_2 = A,\; X_3 = I_y,\; X_4 = f_y,\; X_5 = G,\; X_6 = S \right].$
Parametry losowe zmiennych stanu zestawiono w tabeli:
$ \begin{array}{c|c|c|c|c}
\hline \text{Zmienna} & \text{Znaczenie} & \text{Rozkład} & \text{Wartość średnia} & v \\
\hline L & \text{Rozpiętość} & \mathcal{N} & 6.0\ \mathrm{m} & 0.17\% \\
A & \text{Pole przekroju} & \mathcal{LN} & 112.5\ \mathrm{cm^2} & 4\% \\
I_y & \text{Moment bezwładności} & \mathcal{LN} & 63\,100\ \mathrm{cm^4} & 5\% \\
f_y & \text{Granica plastyczności} & \mathcal{N} & 355\ \mathrm{MPa} & 5\% \\
G & \text{Obciążenie stałe} & \mathcal{N} & 3.5\ \mathrm{kN/m} & 7\% \\
S & \text{Obciążenie śniegiem} & \text{Gumbel max} & 3.6\ \mathrm{kN/m} & 15\% \\
\hline \end{array}$
Zmienne $m$ (masa belki) oraz $E$ (moduł Younga) zostały wyeliminowane na I etapie redukcji zmiennych stanu i nie występują dalej explicite w modelu losowym.
Uwagi o zależnościach losowych
W analizowanym przykładzie zmienne losowe nie są niezależne w sensie probabilistycznym, nawet jeżeli ich rozkłady brzegowe zostały zadeklarowane niezależnie. Wynika to z powiązań geometrycznych, mechanicznych oraz wspólnych źródeł niepewności fizycznej.
Poniżej zestawiono istotne korelacje konstrukcyjne odnoszące się wyłącznie do aktualnego wektora stanu$\mathbf{X}$.
Korelacje geometryczne
Charakterystyki geometryczne przekroju $A$ oraz $I_y$ nie są losowo niezależne. Odchyłki hutnicze wymiarów liniowych przekroju powodują jednoczesne odchylenia pola przekroju oraz momentu bezwładności.
Przyjmujemy: $ \mathrm{Corr}(A,I_y) = 0.8.$
Wskaźnik wytrzymałości $W_{pl}$ nie jest wprowadzany jako osobna zmienna losowa, ponieważ jego losowość jest w pełni reprezentowana przez zmienną $A$.
Korelacje obciążeniowe
Obciążenie śniegiem $S$ wynika z procesów klimatycznych i nie jest fizycznie powiązane z geometrią ani długością belki.
Przyjmujemy:
$\mathrm{Corr}(S,L) = 0, \qquad \mathrm{Corr}(S,A) = 0, \qquad \mathrm{Corr}(S,I_y) = 0, \qquad\mathrm{Corr}(S,f_y) = 0.$
Obciążenie stałe $G$ traktowane jest jako zmienna zagregowana, zawierająca w swoich parametrach losowość masy własnej belki oraz pozostałych składników obciążenia stałego.
Nie wprowadza się korelacji pomiędzy $G$ a zmiennymi geometrycznymi przekroju.
Korelacje materiałowe
Przyjmuje się niezależność jakości stali oraz geometrii walcowania przekroju:
$ \mathrm{Corr}(f_y,A) = 0, \qquad\mathrm{Corr}(f_y,I_y) = 0.$
W przykładzie dydaktycznym pomija się możliwość słabej dodatniej korelacji wynikającej ze wspólnego źródła produkcji.
Uwaga o korelacjach losowych
Zależności pomiędzy zmiennymi stanu a odpowiedzią konstrukcji, takie jak wpływ $L$ na moment zginający $M_E$ czy wpływ $I_y$ na ugięcie $f$, nie są traktowane jako korelacje losowe, lecz jako zależności deterministyczne opisane przez funkcje graniczne. Uwzględnianie ich w macierzy korelacji prowadziłoby do podwójnego liczenia tego samego
mechanizmu fizycznego.
Macierz korelacji zmiennych losowych
Po pierwszym etapie redukcji zmiennych systemu rozważany jest wektor stanu: $ \mathbf{X} = \left[ L,\; A,\; I_y,\; f_y,\; G,\; S\right]^T$
Macierz korelacji $\boldsymbol{\rho}_{XX}$ przyjmuje się w postaci symetrycznej, z jedynkami na przekątnej. Niezerowe wyrazy poza przekątną wynikają wyłącznie z korelacji konstrukcyjnych pomiędzy zmiennymi stanu, a nie z zależności deterministycznych opisanych przez funkcje graniczne.
Jedyną istotną korelacją konstrukcyjną w przyjętym wektorze stanu jest korelacja pomiędzy charakterystykami geometrycznymi przekroju:
$ \mathrm{Corr}(A,I_y) = \rho_{AI}, \qquad \rho_{AI} = 0.8.$.
Pozostałe pary zmiennych stanu uznaje się za nieskorelowane losowo.
Macierz korelacji
Ostatecznie macierz korelacji zmiennych stanu ma postać:
$ \boldsymbol{\rho}_{XX}= \begin{bmatrix}
1 & 0 & 0 & 0 & 0 & 0 \\
0 & 1 & \rho_{AI} & 0 & 0 & 0 \\
0 & \rho_{AI} & 1 & 0 & 0 & 0 \\
0 & 0 & 0 & 1 & 0 & 0 \\
0 & 0 & 0 & 0 & 1 & 0 \\
0 & 0 & 0 & 0 & 0 & 1
\end{bmatrix}, \qquad \rho_{AI} = 0.8. $
Macierz korelacji nie może zawierać zależności wynikających z funkcji granicznych. Korelacje dotyczą wyłącznie zmiennych losowych, a nie odpowiedzi konstrukcji
Zestawienie oryginalnych mechanizmów zniszczenia
Na etapie identyfikacji modelu niezawodnościowego rozpatruje się następujące mechanizmy zniszczenia konstrukcji:
$
\begin{array}{c|l|l}
\ hline \text{Mechanizm} & \text{Opis} & \text{Funkcja graniczna} \\
\hline M1 &\text{Nośność na zginanie} &g_{M1}(\mathbf{X}_O) =\frac{f_y\,W_{pl}}{\gamma_M} -\frac{(G+S)L^2}{8}
\\[6pt] M2 & \text{Ugięcie belki} & g_{M2}(\mathbf{X}_O) =\frac{L}{350} – \frac{5}{384} \frac{(G+S)L^4}{E\,I_y}\\
\hline \end{array}$
Powyższe funkcje graniczne zapisano w postaci odnoszącej się do wektora zmiennych losowych zdefiniowanych $\mathbf{XO}$, obejmującego
wszystkie wielkości występujące explicite w opisie fizycznym konstrukcji.
Macierz korelacji $\boldsymbol{\rho}_{XO XO}$ zdefiniowana dla wektora $\mathbf{XO} jest celowo osobliwa (rangowo zredukowana).
Wynika to z obecności w $\mathbf{XO}$ zmiennych powiązanych funkcyjnie lub quasi-deterministycznie.
w szczególności:
- $m$ jest składnikiem zmiennej $G$,
- zmienne $A$, $I_y$ oraz $W_{pl}$ są powiązane relacjami geometrycznymi przekroju,
- zmienna $E$ występuje wyłącznie jako parametr w iloczynie $E I_y$.
Osobliwość macierzy korelacji na tym etapie jest zatem poprawna fizycznie i odzwierciedla nadmiarowość informacyjną w opisie losowym konstrukcji.
Normalizacja zmiennych $X_i \rightarrow Z_i$
Przeprowadzimy normalizację analityczną podług formuł uzyskany\ch w przykładzie 5 .
X1 – rozpiętość L (rozkład normalny)
$\mu_L = 6.00\ \mathrm{m}, \qquad v_L = 0.17\%, \qquad \sigma_L = v_L \mu_L = 0.0017 \cdot 6.00 = 0.0102\ \mathrm{m}.$
$ Z_1 = \frac{L – 6.00}{0.0102}.$
X2 – pole przekrojun A (rozkład log-normalny)
$ \mu_A = 112.5\ \mathrm{cm^2}, \qquad v_A = 4\%.$
$ \sigma_{\ln A} = \sqrt{\ln(1+v_A^2)} =\sqrt{\ln(1+0.04^2)}=0.0400.$
$ \mu_{\ln A} =\ln(112.5) – \frac{1}{2}\sigma_{\ln A}^2 = 4.720.$
$ Z_2 = \frac{\ln A – 4.720}{0.0400}.$
X3 – moment bezwładności I I_y (rozkład log-normalny)
$ \mu_{I_y} = 63\,100\ \mathrm{cm^4}, \qquad v_{I_y} = 5\%.$
$ \sigma_{\ln I_y} = \sqrt{\ln(1+v_{I_y}^2)} = \sqrt{\ln(1+0.05^2)} =0.0499.$
$ \mu_{\ln I_y} = \ln(63\,100) – \frac{1}{2}\sigma_{\ln I_y}^2 =11.052.$
$ Z_3 = \frac{\ln I_y – 11.052}{0.0499}.$
X4 – granica plastyczności $f_y$ (rozkład normalny)
$ \mu_{f_y} = 355\ \mathrm{MPa}, \qquad v_{f_y} = 5\%,\qquad\sigma_{f_y} = 0.05 \cdot 355 = 17.75\ \mathrm{MPa}.$
$ Z_4 = \frac{f_y – 355}{17.75}.$
X5 – obciążenie stałe G (rozkład normalny)
$ \mu_G = 3.5\ \mathrm{kN/m}, \qquad v_G = 7\%, \qquad \sigma_G = 0.07 \cdot 3.5 = 0.245\ \mathrm{kN/m}. $
$Z_5 = \frac{G – 3.5}{0.245}.$
Obciążenie stałe $G$ traktowane jest jako zmienna losowa o charakterze zagregowanym, obejmująca losowość masy własnej belki oraz pozostałych składników obciążenia stałego.
Wartość średnia $G$ odpowiada wartości nominalnej przyjętej w modelu obciążeniowym, natomiast współczynnik zmienności odzwierciedla łączną niepewność wykonawczą
i eksploatacyjną.
X6 – obciążenie śniegiem S (Weibull max)
$ \mu_S = 3.6\ \mathrm{kN/m}, \qquad v_S = 15\%.$
1) Obciążenie śniegiem $S$ traktowane jest jako zmienna losowa o charakterze klimatycznym. Wartość $s_k$ podana w normie jest kwantylem rozkładu ekstremalnego,
odpowiadający okresowi powrotu $ T = 50\ \text{lat}$ , czyli jest rzędu $ p = 1 – \frac{1}{T} = 0.98.$
2) Inżynierowie często przyjmują jednak często, nieprawidłowo obciążenia śniegiem $s_k$ jako wartość nominalną (referencyjną)
Wyznaczymy parametry rozkładu normalnego dla sytuacji 1) i 2) oraz porównamy oba rozwiązania
1) $s_k$ jest kwantylem rzędu 1 – 1/T= 1- 1/50 = 0,98 ,
Dla przyjętego rozkładu Weibulla maksymalnego: $ F_S(s) =\exp \left[-\left(\frac{s}{\lambda_S}\right)^{k_S}\right].$
Z warunku kwantylowego: $ \exp \left[ -\left(\frac{s_k}{\lambda_S}\right)^{k_S} \right]= 0.98,$
otrzymujemy $ \left(\frac{s_k}{\lambda_S}\right)^{k_S} = -\ln(0.98).$
Stąd parametr skali rozkładu: $ \lambda_S =\frac{s_k} {\left[-\ln(0.98)\right]^{1/k_S}}.$
Dla: $ s_k = 3.6\ \mathrm{kN/m}, \qquad oraz k_S = 7.0 ( wykładnik kształtu typowy dla obciążeń śniegiem),
otrzymuje się: $\lambda_S =\frac{3.6} {\left[-\ln(0.98)\right]^{1/7}} =4.08\ \mathrm{kN/m}.$
Normalizacja
$ F_S(s) =\exp \left[ -\left(\frac{s}{4.08}\right)^{7.0} \right].$
$ Z_S = \Phi^{-1} \left( \exp\left[ -\left(\frac{S}{4.08}\right)^{7.0} \right] \right).$
Wartość średnia wynikająca z tych parametrów wynosi: $ \mu_S^{(q)} =\lambda_S \Gamma\!\left(1+\frac{1}{k_S}\right) =4.08 \cdot \Gamma(1.1429) = 3.87 \mathrm{kN/m}.$
2) $s_k$ wartością nominalną
Parametry rozkładu Weibulla maksymalnego wyznaczono metodą momentów, przyjmując :
$ k_S = 7.0. $
Skala rozkładu wynika z warunku zgodności wartości średniej:
$ \lambda_S = \frac{\mu_S} {\Gamma(1+1/k_S)} = \frac{3.6} { \Gamma(1.1429)} = 3.79\ mathrm{kN/m}.$
Normalizacja
$ F_S(s) =\exp \left[ -\left(\frac{s}{3.79}\right)^{7.0}\right].$
$ Z_6 = \Phi^{-1}\!\left( \exp\left[ -\left(\frac{S}{3.79}\right)^{7.0}\right]\right).$
Porównując:
$ \mu_S^{(m)} = 3.60\ \mathrm{kN/m} \quad \text{(model oparty na średniej (nominalnej) )}, $|
$ \mu_S^{(q)} = 3.87\ \mathrm{kN/m} \quad \text{(model oparty na kwantylu normowym)},$
Do dalszych obliczeń niezawodnościowych przyjmuje się wersję bardziej niekorzystną, tj. model oparty na interpretacji kwantylowej.
Ostateczna wersja normalizacji:
Dystrybuanta: $ F_S(s) = \exp\!\left[ -\left(\frac{s}{4.08}\right)^{7.0}\right].$
Transformacja do przestrzeni Gaussa:
$ Z_S =\Phi^{-1} \left( \exp\!\left[ -\left(\frac{S}{4.08}\right)^{7.0}\right] \right).$
Korelacje po normalizacji
Ponieważ transformacja $X_i \rightarrow Z_i$ jest monotoniczna i wykonywana składowo, macierz korelacji pozostaje niezmieniona:
$ \mathrm{Corr}[\mathbf{Z},\mathbf{Z}] =\mathrm{Corr}[\mathbf{X},\mathbf{X}]$
Standaryzacja
Dla wszystkich zmiennych: $ \mu_{Z_i} = 0, \qquad \sigma_{Z_i} = 1, \qquad Z_i^0 = Z_i.$
Redukcja macierzy korelacji (II etap redukcji – eliminacja redundancji)
Drugi etap redukcji zmiennych stanu ma na celu eliminację redundancji informacyjnej, tj. usunięcie zmiennych losowych, które nie wnoszą niezależnej informacji do miary probabilistycznej obszaru zniszczenia, a jedynie powielają losowość już zawartą w innych zmiennych stanu. Etap ten nie opiera się na lokalnej analizie pochodnych, lecz na globalnej analizie wpływu zmiennych na oba rozpatrywane mechanizmy zniszczenia.
Wektor stanu po I etapie redukcji
Ograniczenie wymiaru przestrzeni losowej do zmiennych istotnych i nieredundantnych prowadzi w analizowanym przykładziedo następującego wektora zmiennych stanu:
$ \mathbf{X} =\left[ L,\; W_y,\; I_y,\; f_y,\; E,\; G,\; S\right].$
Zmienne $X_i$ są nadal zmiennymi oryginalnymi, zachowującymi rzeczywiste jednostki fizyczne.
Uzasadnienie eliminacji zmiennej A
Pole przekroju $A$ zostaje usunięte z wektora stanu, ponieważ informacja o losowości geometrii przekroju jest w pełni reprezentowana przez zmienne $W_y$ oraz $I_y$.
W szczególności:
- wskaźnik wytrzymałości $W_y$ jest zmienną dominującą w mechanizmie nośności $M_1$,
- moment bezwładności $I_y$ jest zmienną dominującą w mechanizmie użytkowalności $M_2$, zmienna $A$ nie występuje explicite w żadnej z funkcji granicznych, a jej wpływ jest pośredni i redundantny.
Pozostawienie jednocześnie zmiennych $A$, $W_y$ i $I_y$ prowadziłoby do potrójnego kodowania tej samej niepewności geometrycznej.
Zmienne istotne funkcyjne
Zmiennymi funkcyjnie istotnymi dla poszczególnych mechanizmów zniszczenia są:
- dla mechanizmu nośności $M_1$: $\{ W_y,\; f_y,\; L,\; G,\; S \},$
- dla mechanizmu użytkowalności $M_2$: $ \{ I_y,\; E,\; L,\; G,\; S \}.$
Zachowanie jednocześnie zmiennych $W_y$ oraz $I_y$ jest zatem konieczne, ponieważ każdy z mechanizmów zniszczenia jest zdominowany przez inną charakterystykę geometryczną przekroju.
Redundancja zmiennych A oraz m
Zmienna $A$ jest redundantna, ponieważ jej losowość jest silnie skorelowana z losowością zmiennych $W_y$ oraz $I_y$ i nie stanowi niezależnego źródła niepewności dla żadnego z mechanizmów zniszczenia.
Zmienna $m$ (masa własna belki) została wyeliminowana już w I etapie redukcji, ponieważ jej wpływ na konstrukcję jest w całości zawarty w zmiennej obciążenia stałego $G$.
Uwaga
Drugi etap redukcji nie zmienia postaci funkcji granicznych, lecz zmniejsza wymiar przestrzeni losowej przy zachowaniu tej samej miary obszaru zniszczenia. Eliminacja redundancji na tym etapie jest warunkiem poprawnej i stabilnej analizy niezawodnościowej zarówno w metodach referencyjnych, jak i w metodach przybliżonych.
II etap jest inny od I etap redukcji zmiennych.
W I etapie stawiamy pytanie „czy zmienna występuje w funkcji granicznej $g(.)? $.
W II etapie pytamy czy wnosi nową losowość?.
W przykładzie pozostawienie $W_y$ i $I_y$ jest ; fizycznie konieczne, matematycznie spójne oraz istotne dla poprawnej separacji M1 i M2.
Wektor stanu po II etapie redukcji
Dla dalszej analizy przyjęto zredukowany wektor zmiennych stanu:
$ \mathbf{X} = \left[X_1 = L,\; X_2 = G,\;X_3 = f_y,\; X_4 = E,\;X_5 = I_y\right]^T.$
Zmienne te są nieredundantne i stanowią minimalny zbiór nośników niezależnej losowości dla rozpatrywanych mechanizmów zniszczenia.
Uwaga:
zmienna
Zredukowana macierz korelacji
Redukcja macierzy korelacji polega na ograniczeniu macierzy $\boldsymbol{\rho}_{XO,XO}$ do podprzestrzeni odpowiadającej zmiennym zachowanym w zredukowanym wektorze stanu $\mathbf{X}$.
Operację tę można zapisać formalnie jako:
$ \boldsymbol{\rho}_{X,X} = \boldsymbol{R}\, \boldsymbol{\rho}_{XO,XO}\, \boldsymbol{R}^{\mathrm T},$
gdzie:
$\boldsymbol{R}$ jest macierzą selekcji o elementach $0$–$1$, która wybiera z macierzy pierwotnej odpowiednie wiersze i kolumny.
macierz $\boldsymbol{R}$ pełni rolę analogiczną do macierzy więzów kinematycznych w metodzie elementów skończonych.
W praktyce operacja ta odpowiada fizycznemu usunięciu wierszy i kolumn odnoszących się do zmiennych wyeliminowanych w II etapie redukcji.
W wyniku redukcji otrzymuje się macierz korelacji:
$ \boldsymbol{\rho}_{X,X} =\begin{bmatrix}
1 & 0 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0.2 & 0 \\
0 & 0 & 0.2 & 1 & 0 \\
0 & 0 & 0 & 0 & 1
\end{bmatrix}. $
Macierz ta jest: symetryczna, dodatnio określona, blokowo-diagonalna, wolna od osobliwości.
Jedynym sprzężeniem losowym w zredukowanym wektorze stanu jest korelacja pomiędzy zmiennymi:
$ X_3 = f_y \quad \text{oraz} \quad X_4 = E,$
co odzwierciedla wspólne źródło niepewności materiałowej stali.
Interpretacja inżynierska
Z punktu widzenia inżynierskiego redukcja macierzy korelacji jest dokładnym odpowiednikiem: eliminacji stopni swobody przez nałożenie warunków brzegowych, kondensacji statycznej, redukcji macierzy sztywności, do podprzestrzeni aktywnych stopni swobody.
Podobnie jak w metodzie elementów skończonych, operacja ta nie zmienia odpowiedzi układu w przestrzeni istotnej, lecz usuwa zmienne nadmiarowe, które nie wnoszą niezależnej informacji o zachowaniu konstrukcji.
Redukcja macierzy korelacji jest elementem modelu fizycznego, a nie procedury obliczeniowej. Jej celem jest zapewnienie, że dalsza analiza niezawodnościowa jest prowadzona w przestrzeni o minimalnym wymiarze i bez redundancji informacyjnej.
Dekorelacja. Kanoniczny rozkład Pugaczewa
Dekorelację zmiennych losowych przeprowadzamy zastosowaniem kanonicznego algorytmu Pugaczewa ($\ref{IIa.15}$) – ($\ref{IIa.16}$) jest prowadzona dla zredukowanej macierzy korelacji
$\boldsymbol{\rho}_{X,X}=\begin{bmatrix}
1 & 0 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0.2 & 0 \\
0 & 0 & 0.2 & 1 & 0 \\
0 & 0 & 0 & 0 & 1
\end{bmatrix}.$
$ \textbf{Iteracja $k=1$}$
$d_1 = c_{11} = 1, \qquad a_{1j} = \frac{c_{j1}}{d_1} = 0, \quad j=2,\ldots,5.$
$\textbf{Iteracja $k=2$}$
$d_2 = c_{22} = 1, \qquad a_{2j} = \frac{c_{j2}}{d_2} = 0,\quad j=3,\ldots,5.$
$\textbf{Iteracja $k=3$}$
$ d_3 = c_{33} = 1, \qquad a_{34} = \frac{c_{43}}{d_3} = 0.2, \qquad a_{35} = 0.$
$\textbf{Iteracja $k=4$}$
$ d_4 = c_{44} – d_3 a_{34}^2 = 1 – 1 \cdot 0.2^2 = 0.96,$
$$ a_{45} = \frac{c_{54} – d_3 a_{35} a_{34}}{d_4} = 0.$
\textbf{Iteracja $k=5$}$
$ d_5 = c_{55} = 1.$\
Ostatecznie:
Macierz transformacji kanonicznej
$ \mathbf{A} =\begin{bmatrix}
1 & 0 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 \\
0 & 0 & 0.2 & 1 & 0 \\
0 & 0 & 0 & 0 & 1
\end{bmatrix}.$
Macierz kowariancji (korelacji) nieskorelowanych składowych
$ \mathbf{D} = \mathrm{diag}(1,\;1,\;1,\;0.96,\;1). $
Sprawdzenie
$ \mathbf{A}\,\mathbf{D}\,\mathbf{A}^{\mathrm T}
=\begin{bmatrix}
1 & 0 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 \\
0 & 0 & 1 & 0.2 & 0 \\
0 & 0 & 0.2 & 1 & 0 \\
0 & 0 & 0 & 0 & 1
\end{bmatrix}
= \boldsymbol{\rho}_{X,X}. $
Interpretacja inżynierska
1) Dekorelacja dotyczy wyłącznie pary $(X_3,X_4)=(f_y,E)$, czyli sprzężonych parametrów materiałowych. Pozostałe zmienne $X_1$, $X_2$ oraz $X_5$ są statystycznie niezależne i nie wymagają żadnej transformacji. Już na poziomie macierzy korelacji widoczna jest efektywna redukcja wymiaru losowego układu do jednego sprzężonego podukładu dwuwymiarowego oraz trzech jednoznacznie niezależnych kierunków.
2) Zastosowanie kanonicznej dekorelacji Pugaczewa prowadzi do transformacji:
$ \mathbf{Z}^0 = \mathbf{A}\,\mathbf{U},$ takiej, że $ \mathbf{C}_{UU} = \mathbf{D}.$
Zmienne odpowiadające $X_1$, $X_2$ oraz $X_5$ mają współczynniki $d_k=1$, co oznacza, że są pełnowartościowymi, niezależnymi kierunkami losowymi.
3) Dla pary $(X_3,X_4)$ algorytm ujawnia jeden kierunek dominujący oraz jeden kierunek wtórny, z redukcją wariancji $d_4<1$. Odpowiada to rozdzieleniu wspólnej informacji losowej pomiędzy dwie nowe zmienne $U_3$ oraz $U_4$.
4) W kontekście modelu dynamicznego sprzężenie $(f_y,E)$ może być interpretowane jako jeden wspólny mechanizm degradacyjny, obserwowany przez dwie różne wielkości stanu
(np. zmiany struktury materiału). Dekorelacja Pugaczewa pozwala ten mechanizm wydzielić w postaci jednej dominującej oraz jednej uzupełniającej składowej losowej, co umożliwia bezpośrednie śledzenie ewolucji wariancji $d_k(t)$ w czasie.
5) W przeciwieństwie do dekompozycji Cholesky’ego, która prowadzi do czysto numerycznej transformacji, metoda Pugaczewa zachowuje czytelną interpretację informacyjną. Każdy krok algorytmu odpowiada ujawnieniu nowego niezależnego kierunku losowego lub stwierdzeniu redukcji jego znaczenia.
Wyznaczenie współczynnika niezawodności dla funkcji granicznej M1
Po I i II etapie redukcji zmiennych stanu wektor stanu przyjmuje postać:
$ \mathbf{X} = \left [X_1 = L,\, X_2 = G , \, X_3= S,\, X_4= f_y, \, X_5= E,\, X_6= I_y \right]^T$
W wyniku normalizacji uzyskujemy zmienne $Z_i \sim mathcal N(0,1)$
$ \mathbf{X} = \left[Z_1 = L,\; Z_2 = G , \, Z_3= S,\, Z_4= f_y,\, Z_5= E,\, Z_6= I_y \right]^T$
Do procedury minimalizacji ($\ref{IIa.30}$} normy ($\ref{IIa.31}$) przedstawiany jest wektor $\mathbf{U}$ zmiennych stanu: znormalizowanych, zredukowanych oraz nieskorelowanych.
$ \mathbf{U} = \left[U_1 (= L,)\; U_2 (= G),\; X_3 (= S),\; U_4 (= f_y),\; U_5 (= E) ,\; U_6 (= I_y) \right]^T.$,
czyli
o wartościach oczekiwanych $\mu_{Ui}=0$, $ (i=1, \ldots 6)$
odchyleniach standardowych \[\boldsymbol{\sigma}_{\mathbf{U}} = [ 1 ,\, 1, \, 1 , \, \sqrt{0.96} , \,1]^T = [ 1 ,\, 1, \, 1 , \, 0.9799 , \,1]^T
oraz macierzy kowariancji \[ \mathbf{C}_{UU} = \mathrm{diag} \left( 1,\; 1,\; 1,\; 0.96,\;1\]^T$
Po normalizacji + dekorelacji: do minimalizacji NIE wchodzą już zmienne fizyczne, tylko zmienne kanoniczne Gaussa o zerowych wartościach oczekiwanych i wariancjach wynikających z macierzy D, co znaczono wyżej ujęciem sensu fizycznego w nawiasy.
Minimalizację normy ($\ref{IIa.31}$) w poszukiwaniu punktu NPP ($\ref{IIa.30}$) przeprowadzimy w arkuszu Excel.
Na tys. P9-1 pokazano arkusz w Excel przygotowany do rozwiązania zadania. Arkusz służy do wyznaczania wskaźnika niezawodności β w sensie Hasofera–Linda (FORM) dla przykładu belki z wieloma mechanizmami zniszczenia, przy losowych parametrach geometrycznych, materiałowych i obciążeniowych. Ten przykładowy arkusz można w prosty sposób rozbudować do większych zadań lub dostosować so swoich potrzeb.
Arkusz Excel służy do wyznaczania wskaźnika niezawodności beta w sensie Hasofera–Linda (FORM) dla belki stalowej z wieloma mechanizmami zniszczenia. Obliczenia realizowane są poprzez rozwiązanie zadania minimalizacji normy wektora U w przestrzeni znormalizowanej przy spełnieniu nieliniowego warunku granicznego g_M(X(U)) = 0. Solver GRG pełni rolę wyłącznie narzędzia numerycznego do rozwiązania zadania optymalizacyjnego. Definicja wskaźnika niezawodności beta ma charakter pierwotny, geometryczny i nie wynika z ustawień normowych.
Arkusz ma budowę nlokową:
Blok A – parametry losowe
Blok zawiera definicję zmiennych losowych modelu w przestrzeni fizycznej X. Dla każdej zmiennej podano: – nazwę i symbol, – wartość średnią $\mu$, – miarę rozrzutu (współczynnik zmienności $v$ lub tolerancję względną), – odchylenie standardowe $\sigma$.
W przykładzie zmiennymi losowymi są: rozpiętość belki L, obciążenie stałe G, obciążenie śniegiem S, granica plastyczności fy, moduł Younga E. Parametry te stanowią jedyne źródło losowości w modelu.
Blok B – zmienne Solvera (przestrzeń U)
Blok realizuje transformację z przestrzeni fizycznej X do przestrzeni znormalizowanej U zgodnie z relacją: $X = \mu + sigma \cdot U$.
Blok zawiera: zmienne decyzyjne Solvera U1, U2, …, odpowiadające im wartości X*, informację, które zmienne są aktywne w procesie optymalizacji. Zmienne nieaktywne mają wartości U = 0.
Blok C – norma wektora U i funkcja celu
W bloku obliczana jest norma euklidesowa wektora U: $||U|| = sqrt(U1^2 + U2^2 + …)$.
Norma ta stanowi funkcję celu Solvera, podlegającą minimalizacji. W punkcie zbieżności norma jest równa wskaźnikowi niezawodności $\beta_HL$.
Blok D – mechanizmy zniszczenia
Zdefiniowane są niezależne mechanizmy graniczne: M1 – nośność na zginanie Funkcja graniczna: g_M1 = MR – ME; M2 – ugięcie Funkcja graniczna: $g_M2 = fdop – f$
Każdy mechanizm posiada własne ograniczenie nieliniowe w Solverze w postaci: $g_M(X(U)) = 0$
Pozwala to na niezależne wyznaczenie wskaźników beta dla poszczególnych mechanizmów oraz identyfikację mechanizmu krytycznego.
Blok E – dane fizyczne pierwotne
Blok zawiera dane deterministyczne: geometrię belki, parametry materiałowe, charakterystyki przekroju, dane obciążeń. Wartości te nie są traktowane jako losowe i nie podlegają transformacji do przestrzeni U.
Blok F – modele obciążenia śniegiem
Blok umożliwia wybór modelu probabilistycznego obciążenia śniegiem: N – nominalny, G – Gauss, GM – Gumbel max, W – Weibull max.
Wybrany model wpływa na wartość charakterystyczną S* oraz na położenie punktu projektowego w przestrzeni U.
Blok G – ustawienia Solvera
Zastosowane ustawienia:
– metoda: GRG Nonlinear,
– tryb: Min (minimalizacja),
– brak założeń liniowości,
– ograniczenie nieliniowe: g_M = 0.
Solver rozwiązuje zadanie optymalizacyjne, nie realizuje bezpośrednio obliczeń niezawodnościowych.
Blok H – wyniki
Blok zawiera:
- współrzędne punktu projektowego U*,
- wartość wskaźnika $\beta_{HL}$,
- porównanie wyników dla różnych modeli obciążenia,
- kontrolne wyniki metody Monte Carlo (Pf_MC, beta_MC).
Blok ma charakter interpretacyjny i porównawczy.
Procedura korzystania z arkusza:
1. Zdefiniować parametry losowe w bloku A.
2. Wybrać model obciążenia śniegiem w bloku F.
3. Wybrać mechanizm zniszczenia (M1 lub M2).
4. Uruchomić Solver:
– funkcja celu: minimalizacja ||U||,
– ograniczenie: g_M(X(U)) = 0.
5. Odczytać punkt projektowy U* oraz wskaźnik beta_HL.
6. Porównać wyniki dla różnych mechanizmów i modeli.
Uwagi
Arkusz realizuje klasyczną definicję wskaźnika niezawodności Hasofera–Linda w ujęciu geometrycznym. Metody FORM, normy projektowe oraz Solver mają charakter wtórny i narzędziowy. Model umożliwia przejrzystą analizę wpływu założeń probabilistycznych na wartość wskaźnika $\beta$ oraz identyfikację mechanizmu krytycznego.
Rys. P9-1 Arkusz Excel do rozwiązania zadania FORM. W celu pobrania tekstu źródłowego arkusza – kliknij na obraz rysunku.Wyznaczenie współczynnika niezawodności dla funkcji granicznej M2
Dla ograniczenia $g_{M2}=0$ przeprowadzamy analogiczne przeliczenia jak dla ograniczenia $g_{M1}=0$
Transfomacja powrotna
Po wyznaczeniu punktu Hasofera–Linda $U∗$ dokonuje się transformacji powrotnej do przestrzeni zmiennych fizycznych zgodnie z relacją
$X_i^*= \mu_{Xi} +\sigma_{Xi} \cdot U_i^*𝑖$
Uzyskane wartości reprezentują najbardziej prawdopodobny punkt awarii dla danego mechanizmu i modelu obciążenia śniegiem.
Dyskusja wyników
- Dlaczego w przykładzie uzyskany rezultat wskazuje na to, najgorszy jest model śniegu G (Gauss) choć na starcie $S_G = 7,064 \, kN/m$ jest znacznie mniejszy od GM (Gumbel max) $S_{GM}= 8,561\, kN/m$ ?
Odp.: FORM nie porównuje „jak duże jest obciążenie na starcie”, tylko „jak daleko trzeba się przesunąć w przestrzeni probabilistycznej, żeby dojść do powierzchni granicznej”.
Zaobserwowane zjawisko : różne rozkłady → różna „cena probabilistyczna” wynika ze sposobu działania FORM
$\Delta U=\cfrac{\Delta S}{\sigma_{eff}$}
w tle wlasności modeli śniegu: Gauss: duża „lokalna wariancja”, tani probabilistycznie ogon, mały koszt w U ; Gumbel max: ogon cięższy, większy koszt w U ; Weibull max: najsilniejsza koncentracja, najdroższy probabilistycznie ogon.
W FORM mianowicie $\beta \approx \cfrac{\text{rezerwa nośnosci}}{\text{efektywna wariancja}}, skąd mamy efekt
$\beta_G < \beta_W < \beta _{GM}$ mimo , że $S_{GM > S_G$
Porządek modeli obciążenia wynikający z wartości charakterystycznych nie musi być zgodny z porządkiem modeli według wskaźnika niezawodności β, gdyż FORM minimalizuje dystans probabilistyczny, a nie ekstremalną wartość obciążenia.
Gauss jest „najgorszy”, bo ma najtańszy probabilistycznie ogon: do osiągnięcia stanu granicznego potrzeba najmniejszego dystansu w przestrzeni U, mimo że jego wartość charakterystyczna obciążenia jest mniejsza niż dla Gumbla.
Pomimo że wartość charakterystyczna obciążenia śniegiem przyjęta zgodnie z modelem Gumbla jest większa niż w przypadku rozkładu normalnego, analiza FORM wskazuje na niższy wskaźnik niezawodności dla modelu Gaussa. Wynika to z faktu, że metoda Hasofera–Linda minimalizuje dystans probabilistyczny w przestrzeni standaryzowanej, a nie wartość obciążenia w przestrzeni fizycznej. Rozkład normalny charakteryzuje się relatywnie „tańszym” probabilistycznie ogonem, co prowadzi do mniejszego kosztu osiągnięcia powierzchni granicznej i w konsekwencji do niższej wartości wskaźnika niezawodności β.
2. Obserwowany efekt wynika z uproszczeń metody FORM , z jej niedoskonałości. Nie jest to metoda referencyjna.
FORM nie widzi całej powierzchni, tylko jej styczną hiperpłaszczyznę. FORM nie odróżnia: awarii przez bardzo rzadkie ekstremum od awarii przez umiarkowane, ale skorelowane odchylenia
Zaobserwowany fakt, że model obciążenia śniegiem oparty na rozkładzie normalnym prowadzi do niższej wartości wskaźnika niezawodności niż modele ekstremalne, nie wynika z błędu obliczeniowego, lecz ze strukturalnych założeń metody FORM. Linearyzacja funkcji granicznej w jednym punkcie oraz lokalna normalizacja rozkładów nienormalnych powodują, że metoda ta ocenia wyłącznie lokalny „koszt probabilistyczny” osiągnięcia powierzchni granicznej, tracąc informację o globalnym kształcie ogonów rozkładów.
3. Porównanie wyników FORM z referencyjnymi MC (Monte Carlo) dla tych samych mechanizmów zniszczenia i wariantów modeli śniegu i dla liczby symulacji 2·10⁶
Stwierdzono rażący brak zgodności z FORM co pokazano w bloku H (Wyniki) arkusza
Z analizy wyników wynika, że nie jest to błąd MC, to jest fundamentalny błąd metody FORM.
W prezentowanym, bardzo prostym, ale bardzo często spotykanym w praktyce przypadku obnażono niedostatki metody FORM: liczenie tylko lokalnej geometrii wokół punktu najbardziej prawdopodobnej awarii przy stosowanie przybliżenia $p_f \approx Phi(-\beta_{HL})$ i ograniczenie do obserwacji fragmentu ogona rozkładu i fragmentu przestrzeni awarii.
W przykładzie zaistniały jednoczenie trzy niekorzystne dla FORM okoliczności: 1) lokalność metody, 2) ostra dominacja tylko jednego mechanizmu zniszczenia (M2), 3) ostra dominacja tylko jednej zmiennej losowej (śnieg), co doprowadziło do braku kompensacji innymi mechanizmami i zmiennymi w sytuacji, gdy obszar awarii jest jest rozległy, a nie punktowy.
Dodatkowo rozważano zadanie ze zmiennymi z duża asymetrią i ciężkim ogonem (Gumbel / Weibull są istotnie nienormalne).
Takie argumenty nie bronią jednak FORM uznawanej jako metoda inżynierska, a faktycznie będąca numeryczną metodą teoretyczną, bez interpretacji fizycznej, która obnażałaby jej słabości dość często, a nawet systematycznie.
Wniosek:
1) Porównanie wyników uzyskanych metodą FORM z estymacją Monte Carlo ujawnia istotne rozbieżności, zarówno ilościowe, jak i jakościowe. W szczególności porządek modeli obciążenia śniegiem według wskaźnika niezawodności β ulega odwróceniu. Zjawisko to wynika z lokalnego charakteru metody FORM, która nie uwzględnia globalnej struktury obszaru awarii ani ciężkości ogona rozkładu obciążenia.
2)W rozpatrywanym przykładzie spełniono wszystkie formalne założenia metody FORM, a jednak otrzymano rażąco błędną aproksymację niezawodności, co wskazuje na strukturalne ograniczenia tej metody, a nie na błąd jej implementacji.
3) Należy pilnie poszukiwać metody, która zastąpi normową metodę FORM/SORM, a będzie mniej kosztowna od metody Monte Carlo MC.
Przykład IIb.1. [System szeregowy – kratownica statycznie wyznaczalna]
Zaprojektować kratownicę pokazaną na rys.P2-1, tak by jej niezawodność mierzona wskaźnikiem Hasofera-Linda wynosiła β =3,8.

Rys. IIb.1-1 Schemat kratownicy statycznie wyznaczalnej. Niezawodnościowy system szeregowy
Rozwiązanie zadania podano w artykule Chodor L, Kłosowska, Dobór elementów struktury konstrukcyjnej szeregowej z warunku wskaźnika niezawodności dla normalnego, log-normalnego, Weibulla i Gumbela rozkładu granicy bezpieczeństwa, Kielce 2014. który zostal sporządzony podczas kursu prowadzonego w 2014 roku przez autora w ramach przedmiotu „Bezpieczenstwo i Niezawodność Budowli” na Wydziale Budownictwa Lądowego Politechniki Świętokrzyskiej w Kielcach:
Skrócone wnioski
- Niezawodność układu zależy od losowej zmiennościobciążenia i nośności każdego elementu wchodzącego w skład układu, rodzaju rozkładu, a także struktury niezawodnościowej.
Projektowanie konstrukcji bez uwzględnienia struktury niezawodnościowej jest zawodne i w praktyce inżynierskiejmoże być przyczyną katastrof budowlanych również wtedy, gdy jest prowadzone metodą stanów granicznych z częściowymi współczynnikami bezpieczeństwa. - W doborze rozkładu prawdopodobieństw należy kierować się tylko przesłankami obiektywnymi, oraz dostępnymi narzędziami analitycznym:
a) rozkład Gaussa (normalny), stosowany w większości probc na temat bezpieczeństwa konstrukcji. zwykle prowadzi do uzyskania zbyt optymistycznego oszacoania niezawodnosći konstrukcji.,
b) dla bardziej realistycznych rozkładów ekstremalnychuzyskuje si e mniejsze niezawodnosći konstrukcji, - W praktyce inżynierskiej, do opisania charakteru obciążeń powinno się założyć, że są one określone rozkładem Gumbela (rozkład maximów), a wytrzymałość konstrukcji opisuje rozkład Weibulla (rozkład minimów).
Prz tym zastosowanie metody kolokacji rozkłądów prawdopodobieństwa, sprowadza analizę do znanych algorymów, wykorzytujących własności rozkładu normalnego, - Podany w pracy przykład potwierdza tezę, że przy analizie niezawodności konstrukcji, należy brać pod uwagę rodzaj rozkładu decydujących parametrów tj. obciążenia i wiodących zmiennych nośności.
Przykład IIb.2 [System równoległy -sprężysto-plastyczna rama portalowa ]
Zaprojektować ramę pokazaną na rys. 11 , tak by jej niezawodność mierzona wskaźnikiem Hasofera-Linda wynosiła β =3,8 .
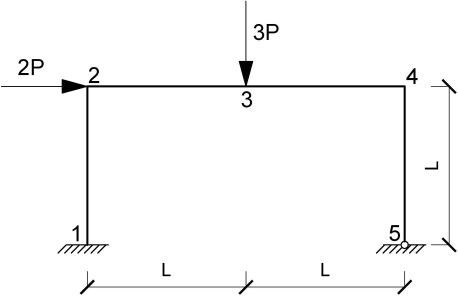
Rys. IIb.2-1. Schemat ramy statycznie niewyznaczalnej – niezawodnościowy system mieszany
Rozwiązanie zadania podano w odrębnym artykule: Chodor L, Kłosowska J., Dobór elementów złożonej struktury konstrukcyjnej z warunku wskaźnika niezawodności, Kielce, 2014 . Zastosowano klasyczne podejście teorii nośności plastycznej, a także najprostsze oszacowania granic niezawodności systemu niezawodnościowego.
Skrócone wnioski
- Niezawodność układu zależy od losowej zmienności obciążenia i nośności każdego elementu wchodzącego w skład układu, rodzaju rozkładu, a także struktury niezawodnościowej.Nośność systemu obliczona jako kwantyl globalny jest większa od sumy kwantyli lokalnych, co jest określane statystycznym efektem zwiększenia nośności obliczeniowej system równoległego.
Dla analizowanej ramy statystyczny efekt zwiększenia nośności obliczeniowej wynosi 15%, - Struktury niezawodnościowe są skorelowane, ponieważ najczęściej posiadają elementy wspólne. Uzyskanie ścisłych wyrażeń na niezawodność lub prawdopodobieństwo zniszczenia dowolnych struktur jest zadaniem złożonym, dlatego ważne jest stosowanie oszacowań górnych i dolnych prawdopodobieństwa zniszczenia.
Przy założeniu, że minimalne cięcia systemu nie mają wspólnych elementów oszacowanie nośności granicznej konstrukcji z warunku $N = min N_k$
daje oszacowanie od dołu, faktyczna nośność plastyczna może być większa.
Przykład IIb.3 [Bezpieczeństwa pręta żelbetowego jako struktury niezawodnościowej]
Sprawdzić bezpieczeństwo rozciąganego pręta żelbetowego o długości $L=6 m$. Zbrojenie pręta zaprojektowano zgodnie z normą [164] wariantowo:
A z 4-ch prętów, B z 8-miu prętów (o mniejszych średnicach). W zadaniu nie są istotne konkretne średnice prętów, ale stwierdzenie, że w każdym przypadku spełniono wymagania normowe, czyli projekt wykonano dla wymaganego przez normę PN-EN 1990 [165] wskaźnika niezawodności
$\beta_{global}=3,8 $.
Dane
Granica plastyczności prętów zbrojeniowych jest oznaczana na próbkach długości
$L^*=30 cm$
jako kwantyl 5%, czyli prawdopodobieństwo zniszczenia próbki wynosi
$p_{si}=0,95$
Pręt jest zbrojony prętami w liczbie
Wariant A: $m_A=4$ ;
Wariant B: $m_B=8$,
Wyniki
Wymagana niezawodność pręta mierzona prawdopodobieństwem zniszczenia, wynosi
$p_s=\Phi(-\beta_{global})=\Phi(-3,8)=0,999927652$
Ustalenie typu systemu niezawodnościowego
Każdy z prętów zbrojeniowych jest złożony z $n=\cfrac {L} {L^*}=\cfrac {600}{106}=20$ elementów połączonych szeregowo.
Pręt żelbetowy jest strukturą z ogólnym rezerwowaniem, której model pokazano na rys. 7 i którą opisuje wzór ($\ref{IIb.10}$)
Ze wzoru ($\ref{IIb.10}$) obliczamy niezawodności systemu w poszczególnych wariantach liczby prętów:
Wariant A: $p_s = 1 – (1- 0,95^{103})^4=0,831$
Wariant B: $p_s = 1 – (1- 0,95^{103})^8=0,971$,
czyli w obu wariantach o kilka rzędów za małe od wymaganego $\beta = 3,8$, czyli
($\ref{I.1}$) $\to$ $p_s =1 -p_f = 1 – \Phi(-\beta) = 1 – 1 – \Phi(-3,8)= 1- 0,000072348 = 0,999927652$
Zbrojenie prętami o mniejszej średnicy, ale większej liczbie w wiązce zwiększa niezawodność systemu. W przykładzie uzyskaliśmy wzrost niezawodności mierzonej prawdopodobieństwem przeżycia o ok. 17%.
W celu uzyskania wymaganej niezawodności pręta- niezawodność elementów (odcinków zbrojenia) dla bardziej korzystnego wariantu B można wyznaczyć z równania:
$0,999927652=1-(1-p_{si}^{103})^8$.
Z rozwiązania tego równania uzyskano
$p_{si}=0,982$,
co daje współczynnik tolerancji ok. 2,10, a nie 1,64 jak dla normowego kwantyla 5% charakterystycznej wytrzymałości (granicy plastyczności) stali.
W w celu utrzymania niezawodności pręta na wymaganym poziomie przez normę PN-EN 1990 [165] należałoby istotnie zwiększyć nośność prętów zbrojeniowych poprzez zwiększenie ich przekroju lub klasy stali. Wymiarowanie pręta z warunku
$\beta \le 3,8$
nie jest przedmiotem niniejszego przykładu, ale prowadzone wyliczenia pokazały ważną okoliczność:
Projektowanie konstrukcji bez uwzględnienia struktury niezawodnościowej jest zawodne i to również wówczas, gdy jest prowadzone metodą stanów granicznych z częściowymi współczynnikami bezpieczeństwa.
Niestety w europejskich normach projektowania nie uwzględnia się pokazanych wyżej mechanizmów niezawodnościowych.
Przykład IIb.4 [Minimalne ścieżki i cięcia i oszacowanie niezawodności systemu metodą Barlow-Proschan]
Przykład za pracą [99]
Wyznaczyć minimalne ścieżki cięcia kratownicy Ditlevsen-Madsen, pokazanej na rys. P4-1 oraz oszacować niezawodność systemu.

Rys. PIIb.1. Kratownica Ditlevsen-Madson
Kratownica Ditlevsen-Madsen (rys. 2-1) składa się z 10. elementów {1, 2, 3, 4, 5, 6, 7, 8, 9, 10}. Kratownice podstawowe (1) do (6) uzyskano poprzez usunięcie odpowiednio pręta: 1, 2, 3, 4,5, 6, to znaczy są to wszystkie możliwe schematy geometrycznie niezmienne.
Sposób utworzenia kratownic podstawowych (1) do (6)
Systemy podstawowe )w tym przypadku kratownice podstawowe) są takie systemy utworzone z systemu oryginalnego (rys. P4-1a), w taki sposób, że po awarii części elementów system pracuje. W budownictwie „system pracuje” = ” system jest stabilny”, czyli pozostaje stabilny i wytrzymały.
W przypadku kratownicy Ditlevsen-Madsen do zbioru systemów podstawowych nie można zaliczyć systemów:
- z usuniętymi elementami 7, 8, 9 lub 10, bo to prowadziłoby do ustroju geometrycznie zmiennego (mechanizmu) i nie spełnia podstawowego warunku systemu konstrukcyjnego, a także wymogu dla minimalnej ścieżki elementów w konstrukcji budowlanej.
- z usuniętymi kolejnymi prętani w schemacie (1) do (6), bo konstrukcja budowlana zmieniłaby się w konstrukcję mechaniczną (mechanizm, czyli system o jednym stopniu swobody).
Minimalne ścieżki
Minimalne ścieżki kratownicy Ditlevsen-Madsen, obrazują schematy (1} do (6) na rys P4-1b. Odpowiadające zbiory elementów można zapisać następująco:
minimalne ścieżki (P12-1)
$S_1={2,3,4,5,6,7,8,9,10}$
$S_2={1,3,4,5,6,7,8,9,10}$
$S_3={1,2,4,5,6,7,8,9,10}$
$S_4={1,2,3,5,6,7,8,9,10}$
$S_5={1,2,3,4,6,7,8,9,10}$
$S_6={1,2,3,4,5,7,8,9,10}$
Każda ścieżka daje oszacowanie: $ r_{S_j} = \prod_{i \in S_j} r_i = r^9 $
Każdy z tych systemów (minimalnych ścieżek) jest układem szeregowym z punktu widzenia niezawodności, zawierającym po n= 9 elementów (prętów). Te minimalne ścieżki są pomiędzy sobą równolegle połączone z punktu widzenia niezawodności.
Minimalne cięcia
Ponieważ elementy 7, 8, 9, 10 występują w każdej minimalnej ścieżce, to mamy 4-ry cięcia jednoelementowe:
${7}, {8}, {9}, {10}$
Każdy z pozostałych sześciu elementów: 1 , 2 , 3 , 4 , 5, 6 występuje po pięć razy we wszystkich minimalnych ścieżkach, to znaczy, wszystkie pozostałe zestawy minimalnych cięć mają dwa elementy i pojawiają się w identycznych parach, a zatem istnieje $\cfrac {5 \cdot 6} {2}=$ 15 minimalnych cięć dwuelementowe:
${1,2}, {1,3}, {1,4}, {1,5}, {1,6},$
${2,3}, {2,4}, {2,5}, {2,6},$
${3,4}, {3,5}, {3,6},$
${4,5}, {4,6},$
${5,6}$
Ostatecznie mamy 19. minimalnych cięć, które reprezentują system szeregowy z 19. oma elementami, z których 15. stanowi równoległe systemy z dwoma elementami. Ostatecznie mamy następujące minimalne cięcia
minimalne cięcia (P12-2)
$\{7\} ,\{8\} ,\{9\} ,\{10\}, $
$\{1,2\}, \{1,3\}, \{1,4\}, \{1,5 \}, \{1,6 \}, $
$\{2,3\}, \{2,4\}, \{2,5\}, \{2,6 \}, $
$\{3,4\}, \{3,6\}, $
$\{4,5\}, \{4,6\}, $
$\{5,6\}. $
Dla identycznych elementów cięcia mają niezawodności:
jednoelementowe: $r_C = r$,
dwuelementowe: $r_C = r^2$
Oszacowania niezawodności
Przyjmijmy dość oczywiste założenie stowarzyszenia elementów (stowarzyszenia zapasów nośności poszczególnych prętów kratownicy), a następnie przyjmijmy, że elementy mają identyczną niezawodność r :
$r_i = r \quad (i=1,…10)$
Zgrubne oszacowanie
dla elementów stowarzyszonych, ale bez znajomości minimalnych ścieżek i cięć wyznaczamy z zależności ($\ref{IIb.28}$).
W przypadku braku informacji o ścieżkach i cięciach, BP-A odnosi się do liczby elementów systemu, a nie do liczby minimalnych cięć. System ma 10 elementów.
$ r^{10} \le r_s \le r $ (P12-3)
Jeśli uwzględniamy znajomość minimalnych ścieżek (P12-1) oraz minimalnych cięć (P12-2), to zgodnie z ($\ref{IIb.34}$), mamy oszacowanie :
Dolne ograniczenie (ścieżki):
$ r_s \ge \max_j \prod_{i \in S_j} r_i = r^9 $
Górne ograniczenie (cięcia):
$ r_s \le \min_j \prod_{i \in C_j} r_i = \min(r,\; r^2) = r^2 $
Ostatecznie:
$ r^9 \le r_s \le r^2 $ (P12-4)
Wnioski
1) Przykład kratownicy Ditlevsen–Madsen pokazuje, że oszacowania Barlow–Proschan dostarczają fundamentalnej, strukturalnej informacji o zachowaniu systemu, natomiast oszacowania Ditlevsen–Madsen umożliwiają dalsze zawężanie przedziału niezawodności poprzez wykorzystanie informacji o wspólnych realizacjach zdarzeń zniszczenia. W praktyce inżynierskiej podejście BP stanowi naturalny pierwszy krok analizy systemowej, zaś oszacowania Ditlevsen–Madsen są logicznym uzupełnieniem w sytuacjach, gdy znane są dominujące mechanizmy zniszczenia oraz ich wzajemne powiązania.
2) Oszacowania Barlow–Proschan wykorzystują jedynie informację o strukturze systemu (minimalnych ścieżkach i cięciach) oraz ewentualnie o stowarzyszeniu elementów. Nie uwzględniają natomiast informacji o stopniu zależności pomiędzy mechanizmami zniszczenia, ani o wzajemnym „nakładaniu się” zdarzeń zniszczenia w sensie probabilistycznym.
2) Ditlevsen i Madsen (1996) zaproponowali ostrzejsze oszacowania niezawodności systemu, wykorzystujące: znajomość minimalnych ścieżek lub cięć; ; prawdopodobieństwa zniszczenia poszczególnych mechanizmów; pary zdarzeń zniszczenia (korelacje na poziomie mechanizmów).
Zdarzenia zniszczenia ścieżek
W rozpatrywanym przykładzie, przy identycznych elementach i założeniu stowarzyszenia:
$r_{S_j} = r^9 \quad \Rightarrow \quad p_j = 1 – r^9$ dla $j = 1,\ldots,6$.
$F_j = {\text{zniszczenie minimalnej ścieżki } S_j}$
oraz $p_j = \Pr(F_j) = 1 – r_{S_j}$.
Oszacowania Ditlevsen-Madsen na poziomie ścieżek
W przykładzie:
dla oszacowania 1 rzędu oDM-S $s=6$
dla oszacowania typu Bonferroniego 2 rzędu oDM-S2 $s=10$,
ścieżki $S_j$ i $S_k$ nakładają się na 8 wspólnych elementów, a różnią się jednym prętem z grupy ${1,\ldots,6}$.
Dla elementów stowarzyszonych i identycznych: $\Pr(F_j \cap F_k) = 1 – r^{10}$
(P12-5)
($\ref{IIb.33}) $\to$
$ oDM^{sign} \begin{cases}
oDM\text{-} S^- \to & r_s \ge 1 – 6(1 – r^9) \\
oDM\text {-} S+ \to & r_s \le r^9\\
oDM\text{-}S2^- \to & r_s \gtrsim 1 – 6(1 – r^9) + \binom{6}{2}(1 – r^{10}) \\
\end{cases}$
Oszacowanie oDM-S jest ostrzejsze od oBP-A, ale nie zawsze ostrzejsze od oBP-C, ponieważ wykorzystuje tylko informację o ścieżkach, bez jawnego uwzględnienia cięć jednoelementowych.
Oszacowanie oDM-S2 jest istotnie ostrzejsze od oBP w praktyce często zbliża się do rzeczywistej niezawodności systemu.
Dla tego samego systemu otrzymujemy:
oBP-A (brak struktury) $r^{10} \le r_s \le r$
oBP-C (ścieżki + cięcia, elementy stowarzyszone) $r^9 \le r_s \le r^2$
oDM-S (ścieżki + pary zdarzeń) $1 – 6(1 – r^9) + \binom{6}{2}(1 – r^{10}) ;\lesssim; r_s ;\le; r^9$
Wnioski z przykładu 12
1) oBP daje geometryczną, strukturalną ramę niezawodności systemu,
2) oDM zagęszcza informację probabilistyczną wokół tej ramy,
3) oba podejścia są komplementarne, a nie konkurencyjne.
Przykład 14 [ Oszacowania niezawodności metodą uogólnionej korelacji]
Wyznaczyć niezawodność belki żelbetowej , pokazanej na rys. P5-1 metodą uogólnionej korelacji,
Uwzględnić mechanizm zniszczenia zbrojenia (przekrój-warstwa 1), a także betonu (przekrój-warstwa 2) oraz mechanizm ścięcia przekroju przypodporowego 3. Zmiennymi losowymi zadania są własności materiałów: stali $ f_y $ oraz betonu $f_c$, a także rozstaw zbrojenia $s$ oraz obciążenia stałe $G$ oraz zmienne $Q$.
Rys. P5-1 Belka żelbetowa do przykładu 3 [101]
Pomiędzy wytrzymałością stali i betonu zachodzi korelacja statystyczna mierzona współczynnikiem korelacji $\rho_{b,s}=0,8$.
Nośności przekroju belki dla poszczególnych mechanizmów zniszczenia są następujące:
- nośność zbrojenia w zginanym przekroju 1: $R_1=b \cdot x_{eff}(d-0,5x_{eff})$, gdzie $x_{eff}= \cfrac {A_s \cdot f_y}{b \cdot f_c}$;
- nośność betonu w zginanym przekroju 2: $R_2=0,42 \cdot b \cdot d^2 f_c$;
- nośność na ścinanie w przekroju 3 : $R_3 = \sqrt{ 8 \cdot b \cdot d^2 \cdot A_{s,w} \cdot f_{y,w} \cdot f_{c,t}}$.
Liczba wyżej wymienionych mechanizmów jest liczbą elementów systemu niezawodnościowego,
$n=3$
Siły przekrojowe wynoszą:
moment zginający w środku rozpiętości $ S_1=\cfrac {(G+Q) \cdot l^2} {14}$;
siła poprzeczna $ S_3=\cfrac {(G+Q) l}{2}$
Powyższe związki funkcyjne prowadzą do skorelowania nośności oraz sił przekrojowych, nawet jeśliby zmienne wejściowe były niezależne. Po przeprowadzeniu obliczeń pierwszego rzędu (linearyzacji), otrzymano wartości parametrów statystycznych, zestawione w tab P5-1. Szczegółowych obliczeń w tym zakresie nie przeprowadza się, ponieważ nie są one przedmiotem przykładu. Ze względu na silnie nieliniowe związki pomiędzy zmiennymi sugerujemy, by obliczenia prowadzić metodami symulacyjnymi za pomocą ogólnie dostępnych generatorów liczb losowych i procedur numerycznych, a nie w drodze przekształceń wzorów.
Tab. P5-1 Parametry statystyczne zmiennych do przykładu 5.
Średni współczynnik uogólnionej korelacji ($\ref{IIb.42}$) wynosi: $\rho_m= \cfrac{2(0,332+0,371+0,580)}{3\cdot (3-1)}=0,428$
Miarodajny współczynnik korelacji ($\ref{IIb.36}$) wynosi:
$ \rho = 0,428 \{ 2-[0,428 + \cfrac {(1-0,428) \cdot (3-log3)} {1-0,1 \cdot 0,428^2 \cdot (3-log3)^2 } ] \} \approx 0$
W przykładzie założymy, że zapasy bezpieczeństwa dla poszczególnych mechanizmów $Z_1$, $Z_2$, $Z_3$ mają normalny rozkład prawdopodobieństwa.
Wówczas indeksy niezawodności wynoszą:
$\beta_1=\cfrac {\mu_{Z_1}}{\sigma_{Z_1}} =\cfrac{137}{51,9}=2,10$,
$\beta_2= \cfrac{474}{131}=3,59$,
$\beta_3= \cfrac{137}{55,5}=2,29$.
Z tablic rozkładu normalnego uzyskujemy prawdopodobieństwo niezawodności dla poszczególnych mechanizmów zniszczenia:
$ p_{171}=\Phi (2,10)= 0,98214$,
$ p_{172}=\Phi (3,59)=0,99983$,
$ p_{s3}=\Phi (2,29)=0,98899$.
Niezawodność systemu ($\ref{IIb.42}$), wynosi:
$ p_s \approx 0,0 \cdot \min \{ p_{171} ; p_{172} ; p_{s3} \}+(1-0,0) [1- (1-p_{171}) \cdot (1-p_{172}) \cdot (1-p_{s3})]=0,0 +1,0[1-(1-0,98214)(1-0,99983)(1-0,98899)]=0,9999$
Można wykazać, że dokładniejsze oszacowanie niezawodności systemu wskazuje, że jest ona nieco mniejsza wynosi 0,9918.
Niezawodności poszczególnych mechanizmów dokładniej opisuje się krzywymi Gram-Charlier z uwzględnieniem ekscesu i skośności rozkładu [101] .
Przykład IIb.3 [ Żelbetowa rama portalowa. Metoda uogólnionej korelacji ]
Wyznaczyć niezawodność ramy portalowej (rys.P6-1), złożonej z 8-miu elementów: 1- mechanizm zniszczenia dolnego zbrojenia rygla, 2- mechanizm zniszczenia ściskanego betonu, 3- mechanizm zniszczenia przekroju na ścinanie, 4 – słup, 5, 6 – stopa słupa, 7- kielich słupa, 8 – podłoże gruntowe .
Rys.P6-1. Żelbetowa rama portalowa , poddana działaniu wiatru i obciążeń pionowych: A- rygiel, B-słup, C-fundament [101]
Niezawodności poszczególnych elementów (mechanizmów zniszczenia) wynoszą:
[$p_{171};…; p_{176} $]=[99,8; 99,9; 99,6; 95,1; 92; 95,9; 99,9; 99,7]%, a współczynniki korelacji
[$\rho_{1,2};…\rho_{7,8}$]=[0,38; 0,34; 0,58; 0,8; 0,7; 0,9; 0,8].
Dla poszczególnych podsystemów mamy:
podsystem A (rygiel):
($\ref{IIb.42}$) → $\rho_m=(0,39+0,35+0,58)/3=0,44$,
($\ref{IIa.41$) → $\rho \approx 0$,
($\ref{IIb.42}$) → $p_{sA}=0,998\cdot 0,999\cdot 0,996=0,993$
podsystem B (słup):
($\ref{IIb.42}$) → $\rho_m=(0,8+0,7+0,93)/3=0,81$,
($\ref{IIa.41$) → $\rho \approx 0,81\{ 2-[0,81+ \cfrac{(1-0,81)(3-log3)}{1-0,1\cdot 0,81^2(3-log2)^2}]\}=0,21$,
($\ref{IIb.42}$) → $p_{sB} \approx 0,21 \cdot 0,92+(1-0,21)[1-(1-0,951)(1-0,92)(1-0,959)] \approx 0,9831$
podsystem C (fundamenty):
($\ref{IIa.41$) → $\rho \approx 0,8\{ 2-[0,8+ \cfrac{(1-0,8)(3-log 2)}{1-0,1\cdot 0,8^2(3-log2)^2}]\}=0,59$,
($\ref{IIb.42}$) → $p_{sB} \approx 0,59\cdot 0,997+(1-0,59)\cdot 0,999 \cdot 0,997 \approx 0,9966$
System (Rama=A+B+C):
Podsystemy są losowo niezależne, więc należy je traktować jako system szeregowy z punktu widzenia niezawodności. Na podstawie formuły (20) mamy:
$p_s=0,993 \cdot 0,9831 \cdot 0,9966=0,9729$.
Przykład 16 [Bikonstrukcja (sprzężone dźwigary płaskie). Metoda uogólnionej korelacji]
Na prostym przykładzie zespołu kratownic płaskich K1, K2 (probwa, lewa) (rys. P7-1) sprzężonych stężeniami T1 (górne i dolne) oraz T2 (pionowe) przeanalizujemy wpływ stężeń na niezawodności bikonstrukcji.
Rys. P7-1 Bikonstrukcja: kratownice K1, K2 sprzężone stężeniami T1, T2Analiza wpływu stężeń na nielosową nośność bikonstrukcji
Mechanizmy zniszczenia ustroju zależą o konfiguracji obciążeń. Dla dominujących obciążeń pionowych kratownice K1 i K2 są obciążone siłami pionowymi w węzłach pasów górnych. W przypadku rozprzężenia ( braku stężeń T1 i T2) mechanizm zniszczenia kratownicy K1 (lub K2) pokazano na rys. Rys P7-2 .
Rys. P7-2. Mechanizm zniszczenia kratownicy K1 pod obciążeniami pionowymi (kratownica przed zniszczeniem – szara, po zniszczeniu -niebieska). Zniszczenie polega na utracie płaskiej postaci zginania
Obraz z rys. P7-2 uzyskano dla kratownicy o wysokości 3 m, rozpiętości 5×3=15 m, obciążonej siłami skupionymi V=23 kN w każdym węźle górnym i równoważnymi siłami poziomymi od imperfekcji H=V/100=0,23 kN i po przeprowadzeniu obliczeń 2-rzędu $P-\Delta$.
Dla prętów wykonanych z RP 200x100x5-S355 (większy wymiar rury w pionie), czyli o sztywności osiowej
$ EA=2,1 \cdot 10^5 \cdot 28,36 \cdot 10^{-4}=5,96 \cdot 10^2 MN$ (P7-1)
(moduł Younga stali $E=2,1 \cdot 10^5 MPa$ ; pole przekroju dla RP 200x100x5: $A=28,36 cm^2$)
Obliczenia wykazały) (rys. P7-3), że krytycznym punktem konstrukcji jest pas dolny przy podporze, który przy uwzględnieniu zjawisk niestateczności i innych warunków normowych [166] jest pod obciążeniem porównawczym V=23 kN wytężony w 90,9 %.
Oznacza to, że obciążenie można w zwiększyć o 1/90,9%=1,100, czyli do wartości $V=1.1 \cdot 23=25,3 kN$. Graniczny mnożnik obciążenia (nośność konstrukcji ) wynosi:
$\Lambda=1,10$, (P7-2)
Przemieszczenia końca wspornika wynoszą: pionowe $\delta_z= 22 mm$, a boczne $\delta_y=18 \cdot \delta_z$ przy 100x mniejszej sile poziomej. Skrócenie pręta (od spaczenia 2- rzędu) wynosi $\delta_x= \cfrac{\delta_z} {15}$.
Rys. P7-3. Sprzężone kratownice płaskie: a) stężeniem górnym T1, b) stężeniem czołowym T2, c) stężeniami T1+T2, d) stężeniami T1+T2+T1* (stężone dolne pasy)
W tab. P7-1 zestawiono nośności bikonstrukcji sprężonej stężeniami w układach z rys. P7-3.
Tab.P7-1. Wpływ stężeń bikonstrukcji na jej nośność $\Lambda$
Sprzężenie pasów górnych stężeniem T1 prowadzi do wzrostu nośności $\cfrac{2,0} {1,105} = 81%$. Natomiast sprzężenie czoła stężeniem T2 o 63%, a stężeniami T1+T2 o 94%. Sprzężenie pasów dolnych jest niekorzystne z powodu nadmiernego skrępowania bikonstrukcji.
Nośność bikonstrukcji stężonej przez T1+T2 zwiększyła się dwukrotnie w stosunku do rozprzężonej kratownicy płaskiej. Należy zwrócić uwagę na to, że efekt taki uzyskano przy obciążeniu każdego węzła identyczną siłą – to znaczy sumaryczne obciążenie bikonstrukcji jest dwa razy większe od obciążenie kratownicy płaskiej.
Przykłąd IIb.4 [Wpływ stężeń T1 i T2 na niezawodność bikonstrukcji ]
Przenalizujemy wpływ stężeń T1 i T2 niezawodności bikonstrukcji.
Przyjmiemy, że informacje o stężeniu o zadanym układzie geometrycznym są zintegrowane w jednej wejściowej zmiennej losowej X, którą jest sztywność osiowa pręta stężenia. Natomiast zmienną wyjściową $Y$ jest nośność konstrukcji $\Lambda$.
$ X = EA \quad ; \quad Y=\Lambda$ (P7-3)
gdzie:
E jest moduł Younga,
A pole przekroju pręta
$\Lambda$ mnożnik obciążenia przy którym konstrukcja przestaje spełniać warunki graniczne.
Wpływ stężeń T1
Rozważmy najpierw wpływ tylko stężeń T1. Brak stężeń T1 oznacza realizację bikonstrukcji ze stężeniami o zerowej sztywność (EA=0). Natomiast realizacje nośności bikonstrukcji o sztywności nominalnej zestawiono w tab.P7-1.
Dla tych dwóch punktów sporządzono nielosową zależność nośności konstrukcji od sztywności stężeń T1 i pokazano ją na rys. P7-4.
Rys. P7-4 Zależność nośności konstrukcji $\Lambda$ od sztywności $EA$ stężeń T1
Funkcję stanu granicznego $Y=g (X)$ w tym przypadku opisuje prosta
$ Y=\varphi (X)=1,1+1,5 \cdot 10^{-3} X $ (P7-4)
W przypadku większej liczby punktów obliczeniowych dokładność wyznaczenia zależności $EA \to \Lambda$ zwiększy się. Funkcję ciągłą w tych przypadkach zaleca się wyznaczać procedurami metody minimów kwadratów (metodami regresji) dla funkcji sklejanych z odcinków parabol. Procedura ogólna będzie przedmiotem innego opracowania. W tym przypadku wyznaczamy podstawowy tok postępowania i nie będziemy rozszerzać rozważań na okoliczności poboczne.
Parametry statystyczne zmiennej wejściowej X=EA, określimy na podstawie publikowanych wyników badań dla modułu Younga oraz pola przekroju profili stalowych [167] :
moduł Younga E: $\mu_E=2,1 10^5 MPa$; $v_E=1,5%$,
współczynnik zmienności długości ścianki: $v_l=3%$
współczynnik zmienności grubości ścianki: $v_t=2%$
pole przekroju A: $\mu_A= 28,36 cm^2$ ( z tablic producenta); $v_A= \sqrt{4( 3^2\%+2^2\%)}=3,6\%$ (cztery ścianki rury prostokątnej)
sztywność EA:
$ (P7-1) \to $ $\mu_{EA}=5,96 \cdot 10^2 \, kN $;
$v_{EA}=\sqrt{ 1,5^2+3,6^2}=3,6 \%$;
$\sigma_x=v_{EA} \cdot \mu_{EA}= 5,96 \cdot 10^2 \cdot 3,6 \%=0,215 \cdot 10^2 =21,5\, kN $,
Powyżej wyrażenia na współczynniki zmienności funkcji otrzymano w drodze linearyzacji, w sposób analogiczny jak pokazano niżej.
W celu zaprezentowania metody, parametry statystyczne funkcji (P7-4) wyznaczymy metodą linearyzacji mimo, że funkcja jest liniowa i można wyznaczyć je z definicji.
$\varphi(x)^{’} = \cfrac {\partial \varphi(X)}{\partial X}= 1,5 \cdot 10^{-3}$
$\sigma_y^2= [\varphi(0^{’}]^2 \cdot \sigma_x^2=(1,5 \cdot 10^{-3})^2\cdot 70,3^2 = 7,4 \cdot 10^{-3}$
Postępując analogicznie, wyznaczamy parametry losowe funkcji wpływu stężeń. W analizie niezawodności istotne jest uwzględnienie zmienności wpływających czynników, co pozwala na dokładniejsze modelowanie ryzyka awarii. Zastosowanie odpowiednich metod statystycznych pozwala na określenie prawdopodobieństwa wystąpienia niepożądanych zdarzeń, co jest niezbędne w projektowaniu i eksploatacji obiektów inżynieryjnych. Właściwe określenie tych parametrów może znacząco wpłynąć na poprawę bezpieczeństwa i efektywności konstrukcji.
Przykład IIc.1 [Strategia odśnieżania dachu]Ujęcie probabilistyczno-ekonomiczne stanów granicznych użytkowalności
Ocenić strategię zarządzania ryzykiem użytkowym dachu hipermarketu wielkopowierzchniowego, związanego z obciążeniem śniegiem w okresie eksploatacji. Celem analizy jest porównanie dwóch alternatywnych strategii: zwiększenia odporności konstrukcji na etapie projektowym oraz strategii eksploatacyjnej polegającej na monitoringu i interwencyjnym odśnieżaniu dachu.
Analiza prowadzić w ujęciu probabilistyczno-ekonomicznym, w którym stany graniczne użytkowalności traktowane są jako zdarzenia losowe generujące mierzalne koszty w całym cyklu życia obiektu.
Rozpatrzyć się dwa warianty strategii [rpjektowo-eksploataycjnej:
Wariant A – strategia projektowa. Zakłada zwiększenie nośności i sztywności dachu poprzez przyjęcie obciążenia śniegiem większego od wartości referencyjnej, co prowadzi do wzrostu kosztu początkowego ΔC_0. Skutkiem jest obniżenie częstości przekroczeń SGU oraz ograniczenie liczby interwencji eksploatacyjnych w okresie użytkowania.
Wariant B – strategia eksploatacyjna. Zakłada projektowanie dachu zgodnie z minimalnymi wymaganiami, określonymi normami przy jednoczesnym wprowadzeniu systemu monitoringu i interwencyjnego odśnieżania. Strategia ta generuje koszty cykliczne oraz ryzyko organizacyjne związane z opóźnieniem lub nieskutecznością interwencji.
Dane wejściowe
Rozpatrywany obiekt stanowi hipermarket o konstrukcji stalowej z dachem płaskim lub o małym nachyleniu. Przyjęto:
- powierzchnię dachu A ≈ 15 000 m²,
- okres użytkowania T = 50 lat,
- lokalizację w strefie śniegowej II lub III (analiza porównawcza).
- użytkowanie obiektu jest ciągłe, a przerwy w funkcjonowaniu generują istotne straty ekonomiczne oraz ryzyko szkód wtórnych.
Tab. IIc-2 $ \to Krytyczne grubości hcr pokrywy śnieżnej generujące incydent odśnieżania dachu (dla potwierdzonego ciężaru śniegu $\gamma_{śnieg} = 1\, ,5 kN/m^3)$:
II strefa obciążenia śniegiem $\to$ $h_{cr} \approx 50 \, cm$
III strefa obciążenia śniegiem $\to$ $h_{cr} \approx 67 \, cm$
tab IIc-4 $\to częstość przekroczeń $h_{cr}$
II strefa obciążenia śniegiem $\to$ $ p_s = p_s = 0,45 \div 0,65 $ (incydenty umiarkowanie)
III strefa obciążenia śniegiem $\to$ p_s = p_s = 0,65 \div 0,85 $ (incydenty częste)
tab IIc-5 $\to Koszty $C_s$, $C_m$ oraz $C_o$
przyjęto z analizy rynku usług utrzymania obiektów wielkopowierzchniowych dla kilku scenariuszy klimatycznych (zima łagodna, typowa i surowa)
Model kosztów
Oczekiwany koszt całkowity wariantu A w okresie T lat zapisano w postaci:
($\ref{IIc.4}$) $ \to E[C_A]= $
Oczekiwany koszt całkowity wariantu B:
($\ref{IIc.5}$) $ \to E[C_B]= $
Koszt interwencji odśnieżania:
($\ref{IIc.6}$) $ \to E[C_śnieg] = T \cdot p_s \cdot C_s$
Koszt ryzyka organizacyjnego:
($\ref{IIc.7}$) $ \to E[C_org] = T \cdot p_o \cdot C_o$
gdzie C_s oznacza koszt pojedynczej akcji odśnieżania, p_o prawdopodobieństwo nieprawidłowej lub opóźnionej interwencji, a C_o koszt szkód wtórnych.
Kryterium decyzyjne
Zgodnie z teorią decyzji i minimalizacji oczekiwanej straty, za racjonalną uznaje się strategię, dla której wartość oczekiwana kosztu całkowitego jest mniejsza: wybierz wariant arg min { E[C_A], E[C_B]}.
Znaczenie przykładu
Przykład ilustruje, że stany graniczne użytkowalności, mimo iż nie prowadzą bezpośrednio do utraty nośności, mogą generować dominującą część kosztów w cyklu życia obiektu. Pokazuje on również, że racjonalna strategia bezpieczeństwa nie wynika automatycznie z wymagań normowych, lecz z analizy ryzyka, częstości zdarzeń i rzeczywistych skutków ekonomicznych.
Przyklad III,1 [ Metoda BSDRM w zastosowaniu do … ]
W przygotowaniu
Literatura
- Verma A. , Srividya A., & Rao K., D. (2015). Reliability and Safety Engineering: Second Edition
- Nowakowski, 2004); (Juran, Gryna, 1993); (ISO 9000
- Modarres, 2006); (Aven, 2015); (Kumamoto, Henley, 1996
- Główny Urząd Nadzoru Budowlanego, Katastrofy budowlane w 2024 roku, Warszawa, lipiec 2025
- Hastings, C. (1955). Approximations for Digital Computers. Princeton University Press, Princeton, NJ.
- Beasley, J. D., Springer, S. G. (1977). Algorithm AS 111: The Percentage Points of the Normal Distribution. Applied Statistics, 26(1), 118–121; Moro, B. (1995). The Full Monte. Risk, 8(2), 57–58
- Abramowitz, M., Stegun, I. A. (eds.) (1964). Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables. National Bureau of Standards, Applied Mathematics Series No. 55, Washington, D.C., Chapter 7, pp. 297–309
- Abramowitz, M., Stegun, I. A. (eds.) (1964). Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables. National Bureau of Standards, Applied Mathematics Series No. 55, Washington, D.C., Chapter 6, pp. 255–266
- Lanczos, C. (1964). A Precision Approximation of the Gamma Function. SIAM Journal on Numerical Analysis, 1(1), 86–96
- PN-ISO 2394:2000, Ogólne zasady niezawodności konstrukcji budowlanych
- PN-EN 1990:2004, Eurokod: Podstawy projektowania konstrukcji
- Coles, An Introduction to Statistical Modeling of Extreme Values, Springer 2001, eqs. 6.5–6.7
- Cornell, C.A.; Benjamin, J.R., Probability, statistics, and decision for civil engineers, McGraw–Hill, New York, 1970);(PN-ISO 2394:2000, Ogólne zasady niezawodności konstrukcji budowlanych
- Cornell, C.A., A probability-based structural code, Journal of the American Concrete Institute, Vol. 66, No. 12, 1969
- Cornell, C.A., A probability-based structural code, 1969
- Pugachev V. S. (1984). Probability Theory and Mathematical Statistics for Engineers. Pergamon Press
- Pugachev V. S. .Probability Theory and Mathematical Statistics for Engineers. Pergamon Press), 1984
- Chapman, S. (1928), On the Brownian displacements and thermal diffusion of grains suspended in a non-uniform fluid, Proceedings of the Royal Society of London A, Vol. 119, pp. 34–54
- Kolmogorov, A. N. (1931), Über die analytischen Methoden in der Wahrscheinlichkeitsrechnung, Mathematische Annalen, Vol. 104, pp. 415–458
- Lundberg J. E., Galambos T. V., Load and resistance factor design of composite columns. Structural Safety, 18 (1996), str. 169–177
- Razzaq Z., Prabhakaran R., Load and resistance factor design (LRFD) approach for reinforced-plastic channel beam buckling. Composites: Part B, 27B (1996), str. 361–369
- King L., Toutanji H., Vuddandam R., Load and resistance factor design of fiber reinforced polymer composite bridge deck. Composites: Part B, 43 (2012), str. 673–680
- Elishakoff I., Probabilistic methods in the theory of structures. John Wiley and Sons, Chichester, 1983
- Nataf, A. (1962). Determination des distributions dont les marges sont données. Comptes Rendus de l’Académie des Sciences, Paris, 225, 42–43
- Hohenbichler, M., Rackwitz, R. (1981). Non-normal dependent vectors in structural reliability. Journal of the Engineering Mechanics Division, ASCE, 107, 1227–1238
- Engelund, S., Rackwitz, R. (1993). A benchmark study on importance sampling techniques in structural reliability. Structural Safety, 12, 255–276
- Stocki, R. (1999). Niezawodnościowa optymalizacja konstrukcji prętowych w zakresie dużych przemieszczeń. Praca doktorska, IPPT PAN
- Stocki, R. (2010). Analiza niezawodności i optymalizacja odpornościowa złożonych konstrukcji i procesów technologicznych. IPPT PAN
- Kolanek, K. (2006). Analiza i optymalizacja niezawodności konstrukcji za pomocą adaptacyjnych metod symulacyjnych. Praca doktorska, IPPT PAN
- Knabel, J. (2004). Analiza niezawodności konstrukcji sprężysto-plastycznych przy użyciu powierzchni odpowiedzi. Praca doktorska, IPPT PAN
- Winkelmann, K. (2013). Obliczanie niezawodności konstrukcji inżynierskich metodami symulacyjnymi oraz metodą powierzchni odpowiedzi. Praca doktorska, Politechnika Gdańska
- Rosenblatt, M. (1952). Remarks on multivariate transformation.The Annals of Mathematical Statistics, 23, 470–472
- Engelund, S., Rackwitz, R. (1993),A benchmark study on importance sampling techniques in structural reliability.Structural Safety, 12, 255–276
- Hohenbichler, M., Rackwitz, R. (1981),Non-normal dependent vectors in structural reliability.Journal of the Engineering Mechanics Division, ASCE, 107, 1227–1238
- Hohenbichler, M., Rackwitz, R. (1981).Non-normal dependent vectors in structural reliability.Journal of the Engineering Mechanics Division, ASCE, 107, 1227–1238
- Liu, P. L., Der Kiureghian, A. (1986).Multivariate distribution models with prescribed marginals and covariances.Probabilistic Engineering Mechanics, 1, 105–112
- Lu, Z. H., Cai, C. H., Zhao, Y. G., Leng, Y., Dong, Y. (2020).Normalization of correlated random variables in structural reliability analysis using fourth-moment transformation.Structural Safety, 82, 101888
- Antoulas, A. C., Approximation of large-scale dynamical systems. SIA, 2005
- Li, J., Cheng, K., Wang, S., Morstatter, F., Trevino, R. P., Tang, J., & Liu, H. (2016). Feature selection: A data perspectiv
- Park, S., Kim, J., & Lee, Y. (2024). A survey on filter techniques for feature selection in cyber-attack detection. Information, 14(3), 191
- Pudjihartono, N., et al. (2022), A Review of Feature Selection Methods for Machine Learning: Advantages, Disadvantages, and Use Cases.Frontiers in Bioinformatics, 2: 92731
- Pugachev V.S. Teorija verojatnostej i matematicheskaja statistika, Izd. Nauka, Moskva, 1979 (wydanie w języku rosyjskim
- Benoit E. , Note sur une méthode de résolution des équations normales Provenant de l’application de la méthode des moindres carrés à un système d’équations linéaires en nombre inférieur à celui des inconnues (Procédé du Commandant Cholesky), Biuletyn Géodésique 2 (1924), 67-70
- Hasofer, A. M., Lind, N. C. (1974), Exact and invariant second-moment code format, Journal of the Engineering Mechanics Division (ASCE), 100(EM1), 111–121
- Rackwitz, R., Fiessler, B. (1978).
Structural reliability under combined random load sequences, Computers & Structures, 9(5), 489–494 - Breitung, K. (1984), Asymptotic approximations for multinormal integrals.
Journal of Engineering Mechanics (ASCE), 110(3), 357–366 - Tvedt, L. (1983), Two second-order approximations to the failure probability, Veritas Report, Division of Engineering, Oslo
- Hohenbichler, M., Rackwitz, R. (1988), Improvement of second-order reliability estimates by importance sampling, Journal of Engineering Mechanics (ASCE), 114(12), 2195–2199
- Köylüoğlu, H. U., Nielsen, S. R. K. (1994), New approximations for SORM integrals, Structural Safety, 15(2), 115–131
- Cai, G. Q., Elishakoff, I. (1994), Refined second-order reliability analysis, Structural Safety, 14(4), 267–276
- Der Kiureghian, A. (1989), Measures of structural safety under imperfect states of knowledge.
Journal of Engineering Mechanics (ASCE), 115(5), 1119–1140 - Bucher, C. G., Bourgund, U. (1990), A fast and efficient response surface approach for structural reliability problems, Structural Safety, 7(1), 57–66
- Zhao, Y. G., Ono, T. (1999), (( A general procedure for first/second-order reliability methods (FORM/SORM), Structural Safety, 21(2), 95–112
- Ang, A. H-S., Ma, H. F. (1981), On the reliability of structural systems, Journal of Engineering Mechanics (ASCE), 107(EM4), 671–691
- Mansour, R., Olsson, M. (1991), Second-order reliability methods using principal curvatures.
Structural Safety, 9(1), 1–12 - Park, Y. S., Ang, A. H-S. (1991), Mechanics-based reliability analysis of structural systems Journal of Engineering Mechanics (ASCE), 117(1), 170–191
- Melchers, R. E. (1999), Structural Reliability Analysis and Prediction, 2nd ed., John Wiley & Sons, Chichester
- Ditlevsen, O., Madsen, H. O. (1996), Structural Reliability Methods, John Wiley & Sons, Chichester
- Hasofer, A. M., Lind, N. ., C., (1974). Exact and invariant second-moment code format. Journal of Engineering Mechanics Division ASCE, Vol.100(No EM1/1974), 111–121
- Ditlevsen, O. Uncertainty modeling with applications to multidimensional civil engineering systems, McGraw-Hill Book Co., Inc.,New York, 1981
- Veneziano, D., Contributions to second moment reliability, Res. Rep. No. R74-33. Dept. of Civ. Engrg., Mass. Inst. of Techno ., Cambridge, Mass., 1974
- Low, B.K., and Tang, Wilson H., Efficient reliability evaluation using spreadsheet, J. of Engrg. Mech., ASCE, New York, 123(7), 749-752 (1997)
- Rackwitz R, Flessler B (1978) Structural reliability under combined randomload sequences. Comput Struct 9:489–494. [ https://doi.org/10.1016/0045-7949(78)90046-9]
- Hu Z., Mansour R., Olsson M., Du X., Second-order reliability methods: a review and comparative study, Structural and Multidisciplinary Optimization 64:3233–3263, (2021)
- Box G.E.P.; Wilson K.B., On the Experimental Attainment of Optimum Conditions, Journal of the Royal Statistical Society, Series B, Vol. 13, 1951
- Harr M.E., Probabilistic Estimates for Multivariate Models, ASCE, 1967
- Harr M.E., Mechanics of Particulate Media: A Probabilistic Approach, McGraw-Hill, 1977
- Harr M.E., Reliability-Based Design in Civil Engineering, McGraw-Hill, 1984/1987
- Baker M.J., Structural Reliability and the Second-Moment Method, ASCE, 1975
- Baker M.J.; Thoft-Christensen P., Structural Reliability Theory and Its Applications, Wiley, 1982
- Rosenblueth E., General Two-Point Estimates in Probabilistic Design, ASCE, 1986
- Jermakow S.M., Metoda Monte Carlo i zagadnienia pokrewne, PWN, Warszawa, 1976
- Kopociński B., Zarys teorii odnowy i niezawodności, PWN, Warszawa, 1977
- Marek P., Guštar M., Anagnos T. (1995). Simulation-Based Reliability Assessment for Structural Engineers. CRC Press, Inc.
- McKay M.D.; Beckman R.J.; Conover W.J., Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code, Technometrics, 1979
- Grigoriu M., Stochastic Systems. Uncertainty Quantification and Propagation, Springer, 2012
- Ávila da Silva Jr. C.R.; Beck A.T., International Journal of Solids and Structures, 2015
- O’Hagan A., Bayesian analysis of computer code outputs: a tutorial, Reliability Engineering and System Safety, 2006), a w Polsxe przez Stockiego (2010)((Stocki R., Analiza niezawodności i optymalizacja odpornościowa złożonych konstrukcji i procesów technologicznych, IPPT PAN, 2010
- Stocki R. (2010). Analiza niezawodności i optymalizacja odpornościowa złożonych konstrukcji i procesów technologicznych, praca habilitacyjna, IPPT PAN, Warszawa
- Melchers R. E. (1992). Simulation in time-invariant and time-variant Reliability Pr-lems. In R. Rackwitz & P. Thoft-Christensen (Eds.), Reliability and Optimization of Structural Systems 91 (Vol. 76, pp. 39–82). Springer Berlin Heidel-berg. http://www.springerlink.com/index/10.1007/978-3-642-84753-0_3
- McKay M.,D., Beckman R., J., Conover W., J., (1979), Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code, Technometrics, 21, (2), pp. 239-245
- Stocki R., Liefvendahl M. (2006), A study on algorithms for optimization of Latin hypercubes. Journal of Statistical Planning and Inference, 136(9), 3231–3247
- Grigoriu M. (2012), Stochastic Systems. Uncertainty Quantification and Propagation. Springer
- Ávila da Silva Jr. C. R., Beck A. T. (2015). New Method for efficient Monte Carlo – Neumann solution of linear stochastic systems. 40, 90–96
- Ávila da Silva Jr. C. R., Beck A. T. (2015), Efficient bounds for the Monte Carlo – Neumann solution of stochastic thermo-elasticity problems. International Journal of Solids and Structures, 58, 136–145
- O’Hagan A. (2006), Bayesian analysis of computer code outputs: a tutorial. Reliability Engineering and System Safety, 91, 1290–1300
- Jermakow S. M. (1976). Metoda Monte Carlo i zagadnienia pokrewne. PWN, Warszawa
- Jacinto L., Sørensen J.D., Nielsen J.S., Faber M.H., Calibration of partial safety factors for existing structures, Structural Safety, Vol. 52, 2015, pp. 32–45
- Vadalà S., Reliability-based calibration of material partial safety factors: limitations of FORM-based approaches, Structural Safety, Vol. 106, 2024
- Tabandeh A., Rahmanian M., Papaioannou I., Straub D., A review and assessment of importance sampling methods for structural reliability analysis, Structural Safety, Vol. 96, 2022, Article 102161
- Kapur K. C., Lamberson L. R. (1977), Reliability in engineering design. Wiley
- Barlow R. E., Proschan F. (1974). Statistical theory of reliability and life testing: probability models. Holt, Rinehart and Winston
- Migdalski J. (Ed.). (1982). Poradnik niezawodności. Podstawy matematyczne, Wydawnictwa Przemysłu Maszynowego WEMA
- Cornell C. A. (1969). A probability Based Structural Code. American Concrete Institute Journal, 66, 974–985
- Augusti G., Barattta A. (1972). Limit analysis of structures with stochastic strengths variations. Journal of Structural Mechanics, (1), 43–62
- Ditlevsen O. (1979). Narrow reliability bounds for structural systems. Journal of Structural Mechanics., 7 (2), 453–472
- Żukowski S. (2006), Ocena bezpieczeństwa płaskich konstrukcji prętowych w aspekcie teorii przystosowania. Oficyna Wydawnicza Politechniki Wrocławskiej, [ http://direct.dbc.wroc.pl/Content/1462/zukowski_ocena_bezpieczenstwa.pdf ]
- Bobrowski D. (1985). Modele i metody matematyczne niezawodności. Wydawnictwo Naukowo-Techniczne, Warszawa
- Ditlevsen, O., & Madsen, H. O. (1996). Structural reliability methods. Wiley
- Bahadur, R. R. (1961), A representation of the joint distribution of responses to n dichotomous items.Studies in Item Analysis and Prediction, Stanford University
- Kudzys A. P., Ocenka nadeznosti zelezobetonnych konstrukcij ( Reliability estimation of reinforced concrete structures. Moskva Publisher, Moskva, 1985
- Izdatelstvo standartov, Metodyka rasceta nadeznosti izdelij z ucetom postepennych otkazov. Izdatelstvo standartov, Moskva, 1976
- Way A.G., Serviceability Limit States in Reinforced Concrete Structures, Cement and Concrete Composites, 2002 {{pełne}}; Holický M., Reliability Analysis for Structural Design, SUN Media, Praha 2009
- Honfi D., Design for Serviceability A Probabilistic Approach, Doctoral Dissertation, Lund University,Faculty of Engineering, Division of Structural Engineering, Report TVBK-1044
- Amadio C.; Fragiacomo M.; Macorini L., Evaluation of the deflection of steel–concrete composite beams at serviceability limit state, Journal of Constructional Steel Research, 73, 95–104, 2012
- ICOLD, Dam Safety – Guidelines, International Commission on Large Dams, Bulletin 59, Paris, 1987
- Det Norske Veritas, Offshore Standard DNV-OS-C101: Design of Offshore Steel Structures, General (LRFD Method), Høvik, Norway, 2011
- Peck R.B., Deep Excavations and Tunneling in Soft Ground, Proceedings of the 7th ICSMFE, Mexico, Vol. 3, 225–290, 1969
- ACI Committee 318, Building Code Requirements for Structural Concrete and Commentary (ACI 318-19), American Concrete Institute, Farmington Hills, Michigan, USA, 2019
- American Institute of Steel Construction, Steel Construction Manual, Fifteenth Edition, Chicago, USA, 2017
- Standards Australia, AS 1720.1-2010 Timber Structures – Design Methods, Sydney, Australia, 2010
- British Standards Institution, Structural steelwork – Serviceability limit states, aktualne wydania norm serii BS EN i BS
- European Committee for Standardization, CEN/TS 19101:2022 Design of fibre-polymer composite structures, Brussels, 2022
- Det Norske Veritas, DNV-OS-C101 Design of Offshore Steel Structures, General (LRFD Method), Høvik, Norway, 2011
- European Committee for Standardization, EN 1992-1-1:2004+A1:2014 Eurocode 2: Design of concrete structures – Part 1-1: General rules and rules for buildings, Brussels
- Polski Komitet Normalizacyjny, PN-EN 1992-1-1:2008 Eurokod 2: Projektowanie konstrukcji z betonu – Część 1-1: Reguły ogólne i reguły dla budynków, Warszawa
- European Committee for Standardization, EN 1992-1-1:2023 Eurocode 2: Design of concrete structures – Part 1-1: General rules and rules for buildings (Second generation), Brussels
- Polski Komitet Normalizacyjny, PN-EN 1992-1-1:2023 Eurokod 2: Projektowanie konstrukcji z betonu – Część 1-1: Reguły ogólne i reguły dla budynków (druga generacja), Warszawa
- European Committee for Standardization, EN 1993-1-1:2005 Eurocode 3: Design of steel structures – Part 1-1: General rules and rules for buildings, Brussels
- Polski Komitet Normalizacyjny, PN-EN 1993-1-1:2006 Eurokod 3: Projektowanie konstrukcji stalowych – Część 1-1: Reguły ogólne i reguły dla budynków, Warszawa
- European Committee for Standardization, EN 1993-1-1:2024 Eurocode 3: Design of steel structures – Part 1-1: General rules and rules for buildings (Second generation), Brussels
- Polski Komitet Normalizacyjny, PN-EN 1993-1-1:2024 Eurokod 3: Projektowanie konstrukcji stalowych – Część 1-1: Reguły ogólne i reguły dla budynków (druga generacja), Warszawa
- European Committee for Standardization, EN 1994-1-1:2004 Eurocode 4: Design of composite steel and concrete structures – Part 1-1: General rules and rules for buildings, Brussels
- Polski Komitet Normalizacyjny, PN-EN 1994-1-1:2008 Eurokod 4: Projektowanie zespolonych konstrukcji stalowo-betonowych – Część 1-1: Reguły ogólne i reguły dla budynków, Warszawa
- European Committee for Standardization, EN 1995-1-1:2004 Eurocode 5: Design of timber structures – Part 1-1: General rules and rules for buildings, Brussels
- Polski Komitet Normalizacyjny, PN-EN 1995-1-1:2010 Eurokod 5: Projektowanie konstrukcji drewnianych – Część 1-1: Reguły ogólne i reguły dla budynków, Warszawa
- European Committee for Standardization, EN 1995-1-1:2023 Eurocode 5: Design of timber structures – Part 1-1: General rules and rules for buildings (Second generation), Brussels
- Polski Komitet Normalizacyjny, PN-EN 1995-1-1:2023 Eurokod 5: Projektowanie konstrukcji drewnianych – Część 1-1: Reguły ogólne i reguły dla budynków (druga generacja), Warszawa
- European Committee for Standardization, EN 1997-1:2004+A1:2014 Eurocode 7: Geotechnical design – Part 1: General rules, Brussels
- Polski Komitet Normalizacyjny, PN-EN 1997-1:2008 Eurokod 7: Projektowanie geotechniczne – Część 1: Zasady ogólne, Warszawa
- European Committee for Standardization, EN 1997-1:2023 Eurocode 7: Geotechnical design – Part 1: General rules (Second generation), Brussels
- Polski Komitet Normalizacyjny, PN-EN 1997-1:2023 Eurokod 7: Projektowanie geotechniczne – Część 1: Zasady ogólne (druga generacja), Warszawa
- International Commission on Large Dams, Dam Safety – Guidelines, Bulletin 59, Paris, 1987
- Japanese Industrial Standards Committee, Structural design provisions for buildings, Tokyo
- Ascione L.; Berardi V.P.; D’Aponte A., Time-dependent behaviour of FRP materials, Composites Part B, 2016
- Bank L.C., Composites for Construction – Structural Design with FRP Materials, Wiley, 2006
- Hollaway L.C., Polymer Composites for Civil and Structural Engineering, Blackie Academic & Professional, 1993
- Sena-Cruz J.; Sá M.; Correia J.R.; Mottram J.T.; Keller T.; Ascione L., Design of fibre-polymer composite structures: Serviceability limit states and creep rupture, CICE 2023
- Boscardin M.D.; Cording E.J., Building response to excavation-induced settlement, Journal of Geotechnical Engineering, ASCE, 1989
- Burland J.B., Assessment of risk of damage to buildings due to tunnelling and excavation, ICE, London, 1995
- Mair R.J.; Taylor R.N.; Burland J.B., Prediction of ground movements and assessment of risk of building damage due to bored tunnelling, Geotechnical Aspects of Underground Construction, 1996
- Peck R.B., Deep Excavations and Tunneling in Soft Ground, Proceedings of the 7th ICSMFE, Mexico, 1969
- Amadio C.; Fragiacomo M.; Macorini L., Evaluation of the deflection of steel–concrete composite beams at serviceability limit state, Journal of Constructional Steel Research, 2012
- Faella C.; Nigro E.; Martinelli E., The influence of shear connection deformability on deflections of steel–concrete composite beams, Journal of Constructional Steel Research, 2003
- National tunnel and metro design guidelines: Japan, Germany, United Kingdom
- Cornell, C.A., A probability-based structural code, 1969), w którym bezpieczeństwo konstrukcji jest opisywane poprzez prawdopodobieństwo przekroczenia określonego stanu granicznego oraz związane z tym konsekwencje. W ujęciu tym ryzyko nie jest cechą binarną (bezpieczne–niebezpieczne), lecz wielkością ciągłą, wyrażoną jako iloczyn prawdopodobieństwa zdarzenia i skutków jego wystąpienia. Równolegle, teoria decyzji von Neumanna–Morgensterna ((von Neumann J.; Morgenstern O., Theory of Games and Economic Behavior, Princeton University Press, Princeton, New Jersey, USA, First Edition 1944; Second Edition 1947; Third Edition 1953
- von Neumann J.; Morgenstern O., Theory of Games and Economic Behavior, Princeton University Press, Princeton, New Jersey, USA, First Edition 1944; Second Edition 1947; Third Edition 1953
- PN-EN 1991-1-3:2005 + PN-EN 1991-1-3:2005/AC:2009/Ap1:2010, Eurokod 1. Oddziaływanie na konstrukcje : Część 1-3: oddziaływanie ogólne – obciążenie śniegiem
- Analiza cenników firm utrzymania obiektów wielkopowierzchniowych, Polska, lata 2015–2024
- Zamówienia publiczne – zimowe utrzymanie dachów obiektów handlowych i logistycznych, Biuletyn Informacji Publicznej, Polska
- Główny Urząd Statystyczny, Koszty robocizny i usług budowlanych – wskaźniki kwartalne, Warszawa
- Raporty zarządców centrów handlowych i obiektów logistycznych – koszty utrzymania zimowego
- Instytut Meteorologii i Gospodarki Wodnej – Państwowy Instytut Badawczy, Roczniki meteorologiczne. Pokrywa śnieżna – dane dobowe ze stacji synoptycznych, Warszawa, serie wieloletnie 1970–2020
- Zamówienia publiczne – zimowe utrzymanie dachów obiektów logistycznych i handlowych, Biuletyn Informacji Publicznej, Polska
- FEMA P-787, Reducing the Risks of Nonstructural Earthquake Damage – Snow and Ice Accumulation on Roofs, Federal Emergency Management Agency, Washington, DC, USA, 2011
- ASCE, Snow Loads: Guide to the ASCE 7 Standard, American Society of Civil Engineers, Reston, Virginia, USA, 2016
- NRCA, Roof Snow Load Management – Case Studies and Best Practices, National Roofing Contractors Association, Rosemont, Illinois, USA
- Taylor D.A.; McKay R., Snow Load Management on Large Flat Roofs, Canadian Journal of Civil Engineering, National Research Council Canada
- Zhang A., Zhiying W., Yukun W, Min X., Performance analysis for a degrading system with Markov model, Proceedings of the 32nd European Safety and Reliability Conference (ESREL 2022) 1379- 1384
- Zhang A., Zhiying W., Yukun W., Min X., Performance analysis for a degrading system with Markov model, Proc. 32nd European Safety and Reliability Conference (ESREL 2022), (Ed. Leva M.C. i in), Research Publishing, Singapore. pp. 1379- 1383
- Pugachev V. S. (1984), probability Theory and Mathematical Statistics for Engineers. Pergamon Press
- PN-EN 1993-1-1:2024-10, Eurokod 3 – Projektowanie konstrukcji stalowych – Część 1-1: Reguły ogólne i reguły dla budynków
- EC0 PN-EN-1990 Podstawy Projektowania Konstrukcji, 1994
- PN-EN 1992-1+AC+Ap 1,2,3: 2008, Projektowanie konstrukcji z betonu, Część 1-1: Reguły ogólne i reguły dla budynków
- PN-EN 1990:2004, Eurokod: Podstawy projektowania konstrukcji
- PN-EN 1993-1-1+A1:2006, Eurokod 3. Projektowanie konstrukcji stalowych, Część 1-1: Reguły ogólne i reguły dla budynków
- Mrazik A. (1987). Teoria Spolahlivosti ocelovych konstukcjii. VEDA Vydatelstvo slovenskej akadamie VIED
________________________________



