
Leszek Chodor, 26 października 2014
20.10.2025 scalenie kilku odrębnych artykułów,
26.10.2025 – nadal naprawa po poważnej awarii portalu.
W przypadku nieczytelnych treści, proszę powiadomić: leszek@chodor.co
W ciągu ostatnich 24 godzin z artykułu korzystało 0 Czytelników
W literaturze można znaleźć różne definicje rodzajów zginania: czystego, prostego, poprzecznego i ukośnego. W niniejszym artykule definicje te uporządkowano i przedstawiono w sposób spójny. Belka jest elementem prętowym, który w najprostszym przypadku podlega zginaniu, a w ogólności może być również rozciągany, ściskany, ścinany oraz skręcany swobodnie lub nieswobodnie. W modelowaniu metodą elementów skończonych odpowiadający jej element belkowy jest elementem jednowymiarowym, którego wymiar dominujący (długość pręta $L$) jest co najmniej o rząd większy od wymiarów przekroju poprzecznego ($h$ i $b$). W zależności od przyjętych założeń kinematycznych, rodzaju wytężenia oraz zakresu uwzględnianych efektów fizycznych stosuje się różne modele belkowe, między innymi Bernoulli-Eulera, Timoshenko-Ehrenfesta oraz Własowa. Uwzględnienie odkształceń postaciowych w teorii Timoshenko pozwala traktować jako belki również średnio-krępe pręty zginane o smukłości $4 \le L/h < 10$, a w praktyce inżynierskiej często nawet do $L/h \approx 8$.
Nowoczesne programy inżynierskie mają zaimplementowany element Timoszenko-Własow. Element jest używany nie tylko w programach naukowych, jak Abaqus, Ansys, COMSOL Multiphysics, ale także inżynierskich: SAP2000, OpenSees, SolidWorks, ETABS, a nawet Mathcad, LTBEAM i Consteel dla belek krępych.
W artykule przedstawiono dwie teorie powszechnie stosowane w technice, a mianowicie teorię Eulera-Bernoulliego oraz teorię Timoshenko-Ehrenfesta. Część I poświęcono klasycznej teorii belki Bernoulli-Eulera.
Część I. Analiza zginania belek – teoria klasyczna
W całej pracy przyjęto prawoskrętny układ współrzędnych zgodny z teorią sprężystości. Dodatnie przemieszczenia odpowiadają dodatnim kierunkom osi układuwspółrzędnych, dodatnie naprężenia i siły normalne odpowiadają rozciąganiu, natomiast ściskanie przyjmowane jest jako ujemne. Taka konwencja znakowania oznacza, ze automatycznie działają wszystkie klasyczne wzory: transformacje układów współrzędnych, macierze obrotu, tensor odkształceń, tensor naprężenia,rachunek różniczkowy, geometria analityczna oraz najważniejsze w mechanize klasycznej twierdzenie twierdzenie Gaussa–Ostrogradskiego (często nazywanerównież twierdzeniem Greena–Ostrogradskiego), z którego wynikają: równania równowagi, warunki brzegowe, zasada prac wirtualnych, zasada energiipotencjalnej, metoda elementów skończonych, twierdzenia wzajemności Maxwella-Bettiego, całe formalizmy tensorowe. W ten sposób unikamy rozdźwiękupomiędzy mechaniką budowli, a matematyki teorią konstrukcji – odwrócenie osi z w dół z godnie z kierunkiem obciążeń grawitacyjnych prowadziłoby donieptrzebnych kolizji w znakowaniu.
Belka
W konstrukcjach budowlanych belka odgrywa kluczową rolę w zapewnieniu wytrzymałości i stateczności budynków oraz innych obiektów. W klasycznej definicji belki przyjmuje się, że jest ona prętem, którego długość $L$ jest znacznie większa od największego wymiaru przekroju poprzecznego $h$ lub $b$:
\[ \lambda_b=\cfrac{L}{\max[h,b]} \tag{I.1} \label{I.1} \]
W praktyce projektowej graniczną smukłość $\lambda_{b,lim}$ przyjmuje się orientacyjnie na poziomie:
10 – klasyczna teoria sprężystości,
8 – techniczna teoria belek,
3 – konstrukcje żelbetowe,
4 – konstrukcje kompozytowe.
Podane wartości odnoszą się do zakresu stosowalności klasycznej teorii belek Bernoulli-Eulera.
W pracy Rodrigo (2023) [1] na podstawie symulacji numerycznych pokazano, że smukłości graniczne $\lambda_{b,lim}$ przy zastosowaniu różnych teorii belkowych, różniących się stopniem uwzględnienia odkształcalności postaciowej, wynoszą:
4 dla teorii belki Euler-Bernoulli,
0,9 dla teorii belki Timoshenko-Ehrenfest,
0,3 dla teorii belki Reddy-Bickford,
0,1 przy zastosowaniu teorii wyższego rzędu (7. lub 5. rzędu).
Własne badania wskazują, że graniczne smukłości belek, przy których uzyskuje się dokładność do ok. 3%, zwykle wystarczającą w zastosowaniach inżynierskich, wynoszą:
8 dla teorii belki Euler-Bernoulli,
4 dla teorii belki Timoshenko-Ehrenfest,
2 dla teorii belki Reddy-Bickford,
1 przy zastosowaniu teorii wyższego rzędu (7. lub 5. rzędu).
Graniczne smukłości w niewielkim stopniu zależą od materiału belki, a przede wszystkim zależą od typu teorii belkowej. Poniżej tych smukłości zaleca się w praktyce stosować elementy dwuwymiarowe (tarczowe, powłokowe). W artykule przedstawiono dwie teorie stosowane w technice, a mianowicie: Euler-Bernoulli oraz Timoshenko-Ehrenfest,a w tej części teririą klasyczną Bernoulli-Eulera.
Zginanie
Zginanie jest definiowane następująco:
- wg słownika języka polskiego [2]: nadawanie czemuś trwałej krzywizny, kabłąkowatego, półkolistego kształtu,
- wg innego słownika języka polskiego [3]: jeśli coś zostało zgięte lub jeśli zgięło się, to gnąc się zmieniło chwilowo lub na stałe swój kształt,
- wg [4] stan deformacji, przy którym prosty w stanie niezdeformowanym pręt, po deformacji jest zakrzywiony (wykazuje różną od zera krzywiznę). Zginanie jest dominującym sposobem pracy prętów, nazywanych belkami.
W artykule przedstawiono podstawowe informacje o zginaniu prętów, które są wykorzystywane w praktycznym projektowaniu belek wykonanych z różnych materiałów konstrukcyjnych, w tym stali, betonu drewna:
- belki stalowe w klasycznym podejściu normowym
- belki żelbetowe w podejściu normowym
- belki drewniane w ujęciu normowym.
Każda z tych belek ma swoje unikalne właściwości i zastosowania.
Definicje rodzajów zginania pręta pryzmatycznego wynikają z rozwiązań teorii sprężystości, np. [5] i są związane z dokładnością wypełnienia warunków statycznych, kinematycznych oraz fizycznych tej teorii.
Definicje przytaczamy dla przypadku zginania pręta pryzmatycznego, to znaczy takiego, którego podstawy (ścianki poprzeczne) leżą w płaszczyznach równoległych do siebie, a ścianki boczne są powierzchniami, zbudowanymi z pęku prostych, łączących odpowiadające punkty obu podstaw. W ogólności pręt pryzmatyczny nie musi mieć prostoliniowej osi lub stałego przekroju. Przypadek pręta zakrzywionego lub pręta o zmiennej sztywności po długości należy rozpatrywać odrębnie, bo występują tam dodatkowe zjawiska nie uwzględnione w przypadku elementarnym.
Zginanie czyste
Przypadek czystego zginania zdefiniowano na rys. 1. Charakteryzuje się on tym, że ścianki czołowe pręta obciążone są bryłami obciążeń, a nie siłami przekrojowymi o gęstości:
\[ q_{vz} = k \cdot z \tag{I.2} \label{I.2} \]
gdzie k jest dowolną stałą, z współrzędną pionową punktów przekroju o wartości z=0 w osi pręta.
Przy takim obciążeniu uzyskuje się ścisłe rozwiązanie teorii sprężystości z wykorzystaniem tylko podstawowych równań teorii; statycznych (Naviera), geometrycznych (Cauchyego) oraz fizycznych (Hooka).
Założenie płaskich przekrojów Bernoulli można wyprowadzić z rozwiązania ścisłego jako wniosek. W tym sensie założenie Bernoulli nie jest pierwotne (nie jest założeniem w sensie matematycznym), a jedynie wnioskiem z rozwiązania ścisłego [6].
W wyniku rozwiązania ścisłego zagadnienia czystego zginania uzyskujemy również związki na parametr k rozwiązania ścisłego, występujący we wzorze (\ref{I.2}), a mianowicie:
\[ k= \cfrac{E}{\rho}=E\cdot w” \left( = \cfrac{M}{I_y} \right) \tag{I.3} \label{I.3} \]
gdzie:
E – moduł Younga materiału,
$w$ – ugięcie osi, $w”$ – druga pochodna funkcji ugięcia,
$\rho$ – promień krzywizny zginanego pręta.
W przypadku czystego zginania promień zginania $\rho$ oraz $w”$ są stałe po długości pręta.
W nawiasie okrągłym w ($\ref{I.3}$) podano zależność na stałą k w przypadku prostego zginania momentem zginającym M przyłożonym z przeciwnymi znakami do końców pręta, którego przekrój ma moment bezwładności $I_y$.
Odwrotność promienia krzywizny $\rho(x)$ (rys.4b) jest nazywana krzywizną ugięcia $\kappa$ i jest związana z ugięciem $w(x)$ znaną zależnością z geometrii różniczkowej [7]:
\[ \kappa \stackrel{\rm def}{=} \cfrac{I.1}{\rho(x)} = \cfrac{|w”(x)|} {\left[1+(w'(x))^2\right]^{3/2}} \tag{I.4} \label{I.4} \]
Znak bezwzględnej wartości użyto w celu podkreślenia, że krzywizna jest nieujemna.
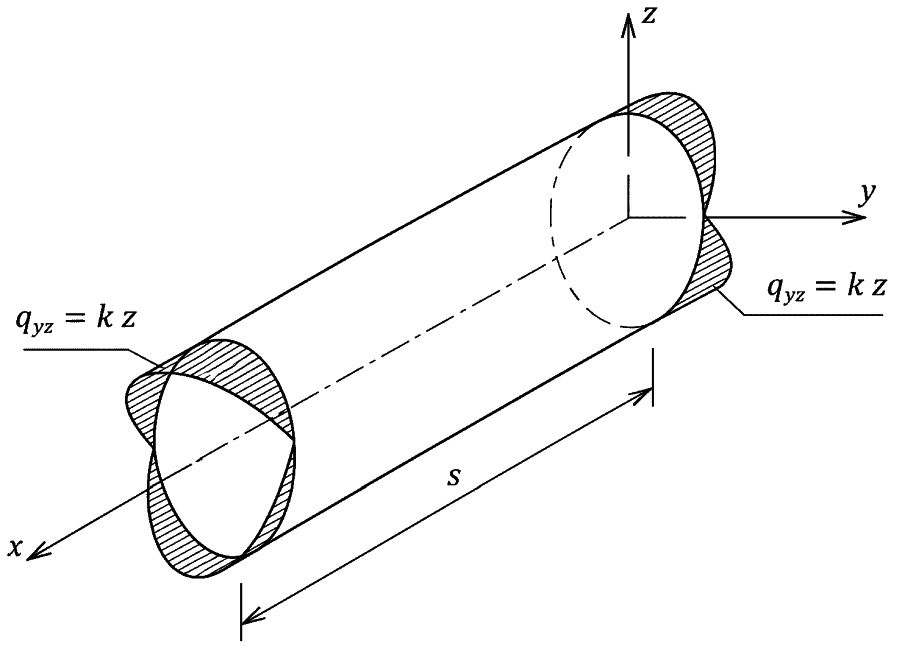
Rys.1. Czyste zginanie (opracowano na podstawie [8])
W przypadku czystego zginania ściśle określone naprężenia we wszystkich przekrojach pręta są takie same (nie zależą od x oraz y) i wynoszą:
\[ \sigma_x= – k \cdot z \tag{I.5} \label{I.5} \]
a pozostałe składowe macierzy naprężeń są zerowe: $\sigma_y=\sigma_z=\tau_{xy}=\tau_{xz}=\tau_{yz}=0$
Ściśle wyznaczone odkształcenia wynoszą:
\[ \varepsilon_x= -\cfrac{k}{E}\cdot z \quad ; \quad \varepsilon_y=\varepsilon_z= \nu \cdot \varepsilon_x \tag{I.6} \label{I.6} \]
gdzie $\nu$ – współczynnik Poissona materiału
Wszystkie odkształcenia kątowe (postaciowe) są zerowe: $\gamma_{xy}=\gamma_{yz}=\gamma_{xz}=0$
Zginanie proste
Proste zginanie jest przypadkiem obciążenia pręta, w którym w każdym przekroju działa wyłącznie moment zginający w jednej z głównych płaszczyzn przekroju [9]. W żadnym przekroju pręta nie występują siły poprzeczne (tnące). Oznacza to stan, w którym moment zginający jest stały na całej długości pręta, a obciążenie zewnętrzne działa wyłącznie na podstawy (końce pręta) i może zostać sprowadzone do dwóch momentów zginających o jednakowej wartości i przeciwnych zwrotach.
Przypadek prostego zginania zdefiniowano na rys. 2.
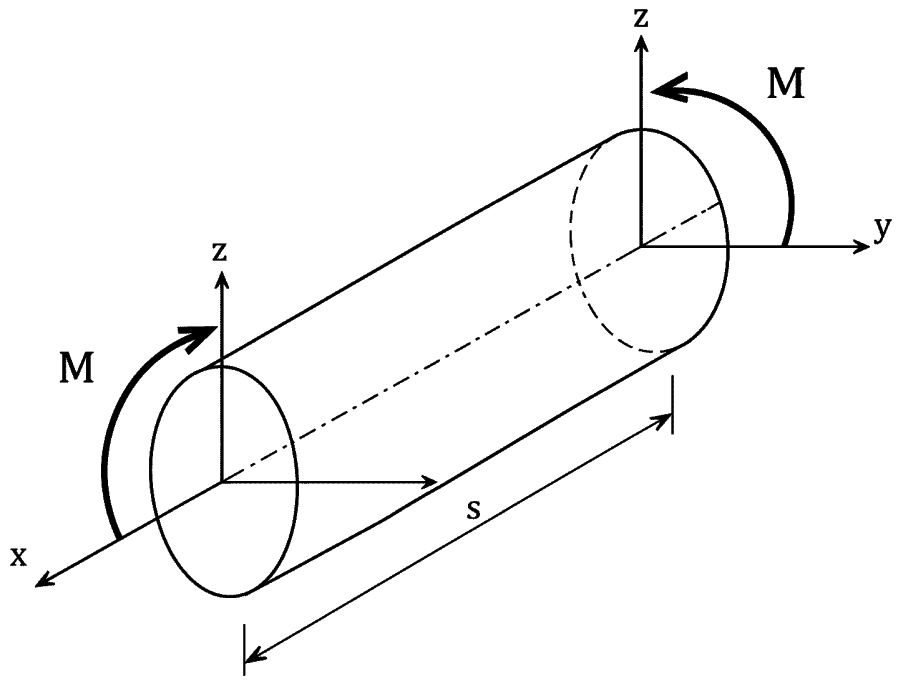
Rys.2. Proste zginanie (opracowano na podstawie [8])
Na podstawy pręta działa moment zginający $M$, który jest statycznie równoważny obciążeniom powierzchniowym $q_{vz}$ przedstawionym na rys. 1. Obciążenia te związane są zależnością
\[ q_{vz}=\cfrac{M}{I_y}\cdot z \tag{I.7} \label{I.7} \]
Po podstawieniu wyrażenia na stałą $k$ podanego w nawiasie we wzorze ($\ref{I.3}$) do zależności ($\ref{I.5}$) oraz ($\ref{6}$) otrzymujemy wyrażenia na naprężenia i odkształcenia w postaci
\[ \sigma_x=-\cfrac{M}{I_y}\cdot z \tag{I.8} \label{I.8} \]
\[ \varepsilon_x=-\cfrac{M}{EI_y}\cdot z \quad ; \quad \varepsilon_y=\varepsilon_z=\nu\cdot\varepsilon_x \tag{I.9} \label{I.9} \]
Pozostałe składowe macierzy naprężeń oraz odkształceń są zerowe:
$\sigma_y=\sigma_z=\tau_{xy}=\tau_{xz}=\tau_{yz}=0$,
$\gamma_{xy}=\gamma_{yz}=\gamma_{xz}=0$.
Poprzeczne zginanie
Przypadki czystego i prostego zginania występują w praktyce stosunkowo rzadko i pełnią głównie rolę rozwiązań odniesienia. Większość rzeczywistych belek pracuje w warunkach zginania poprzecznego, w którym oprócz momentów zginających występują również siły poprzeczne wywołujące ścinanie przekroju.
Poprzeczne zginanie (rys. 3) jest przypadkiem obciążenia nieswobodnego (podpartego) pręta pryzmatycznego o przekroju poprzecznym symetrycznym względem osi $z$, obciążonego symetrycznie względem tej osi. Obciążenie może działać na pobocznicy oraz na ściankach poprzecznych pręta i ma gęstość
$q_v = – q (x) $.
Znak minus oznacza, że obciążenie działa przeciwnie do dodatniego zwrotu osi $z$, czyli pionowo w dół.
Znalezienie ścisłego rozwiązania zagadnienia poprzecznego zginania jest w ogólnym przypadku bardzo trudne, ponieważ zależy ono od kształtu przekroju poprzecznego. Nawet dla najprostszego przekroju prostokątnego nie są spełnione wszystkie równania nierozdzielności odkształceń teorii sprężystości. Znane rozwiązania techniczne wytrzymałości materiałów stanowią jedynie przybliżenia rozwiązania ścisłego.
Z zasady de Saint Venanta, dotyczącej lokalnego charakteru działania obciążeń oraz statycznej równoważności układów obciążeń, wynika, że rozwiązania uzyskane dla czystego i prostego zginania mogą być wykorzystywane również do analizy innych przypadków obciążenia pręta, w tym zginania poprzecznego. Należy jednak pamiętać, że nie są to rozwiązania ścisłe, lecz jedynie ich aproksymacje.
Na czole belki poprzecznie zginanej przedstawionej na rys. 3 pokazano siły przekrojowe wyznaczone zgodnie z techniczną teorią zginania.
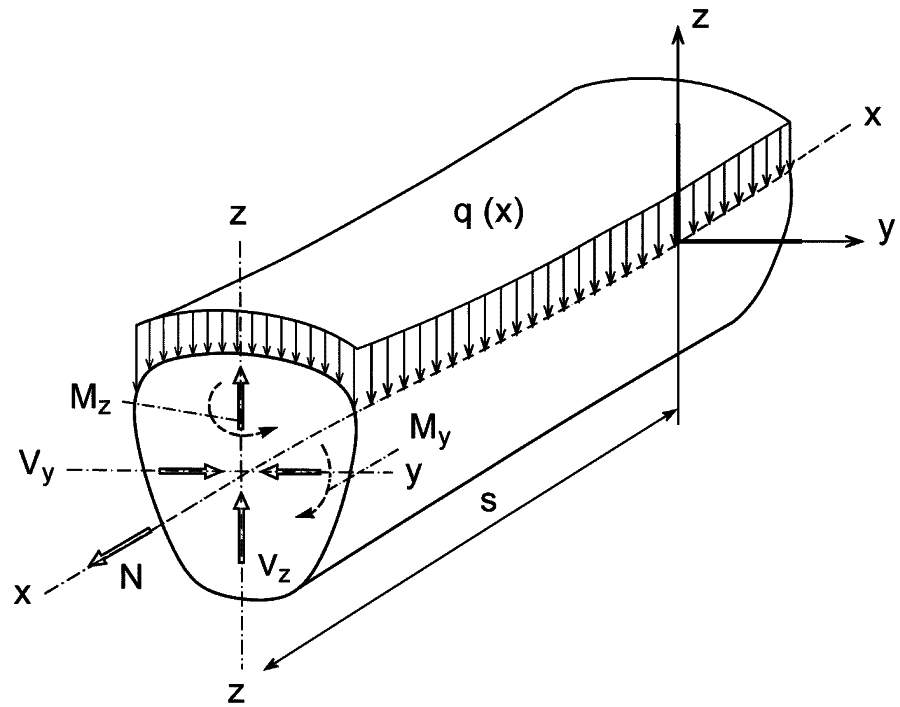
Rys.3. Poprzeczne zginanie [10] (uzupełnione o obciążenie siłę osiową w celu wskazania, że belka często oprócz zginania i ścinania jest też rozciągana/ściskana)
Teoria klasycznej belki Bernoulli-Eulera wykorzystuje zależności uzyskane dla czystego i prostego zginania do przybliżonego opisu zginania poprzecznego. Natomiast teoria poprzecznego zginania stanowi jej uogólnienie w sposób przedstawiony w dalszej części artykułu.
Ukośne zginanie
Ukośne zginanie jest przypadkiem obciążenia pręta zginanego jednocześnie w płaszczyźnie $(x,z)$ momentem $M_y$ oraz w płaszczyźnie $(x,y)$ momentem $M_z$. Zgodnie z zasadą superpozycji, obowiązującą w zakresie liniowo sprężystym, rozwiązanie zagadnienia ukośnego zginania jest sumą rozwiązań odpowiadających poszczególnym przypadkom prostego zginania.
Obciążenie momentem $M_x$ działającym w płaszczyźnie $(y,z)$ nazywa się skręcaniem. Jest ono jakościowo odmiennym przypadkiem obciążenia i wytężenia konstrukcji, który omówiono w artykule Skręcanie prętów. Pręty cienkościenne..
Rozwiązania czystego i prostego zginania stanowią punkt wyjścia do budowy technicznej teorii zginania belek. W dalszej części omówiono klasyczną teorię Bernoulli-Eulera, która wykorzystuje te zależności do opisu zginania poprzecznego.
Belka Bernoulli-Euler
Rys historyczny i założenia klasycznej teorii belkowej
Teoria belki Bernoulli powstała ok. 1750 roku dzięki wkładowi Leonarda Eulera i Daniela Bernoulliego. Bernoulli podał wzór na energię odkształcenia przy zginaniu belki, z którego Euler wyprowadził i rozwiązał równanie różniczkowe, przy czym skorzystali również z osiągnięć Jacoba Bernoulliego. Wcześniej problem zginania belki podejmowali Leonardo da Vinci i Galileusz.
Dwa kluczowe założenia teorii belki Euler-Bernoulli to:
1) Materiał jest liniowo sprężysty zgodnie z prawem Hooke’a.
2) Przekrój płaski przed odkształceniem pozostaje płaski i prostopadły do odkształconej osi pręta po jego obciążeniu.
Założenie płaskich przekrojów jest nazywane hipotezą Naviera lub zasadą zesztywnienia.
Założenie płaskich przekrojów jest również stosowane do zagadnień dużych sił ściskających (zagadnienia niestateczności giętnej), jak i dużych obrotów (zagadnienia giętno-skrętne). Założenie płaskich przekrojów i wynikający z niego rozkład odkształceń zginania po wysokości przekroju zilustrowano na rys.4.
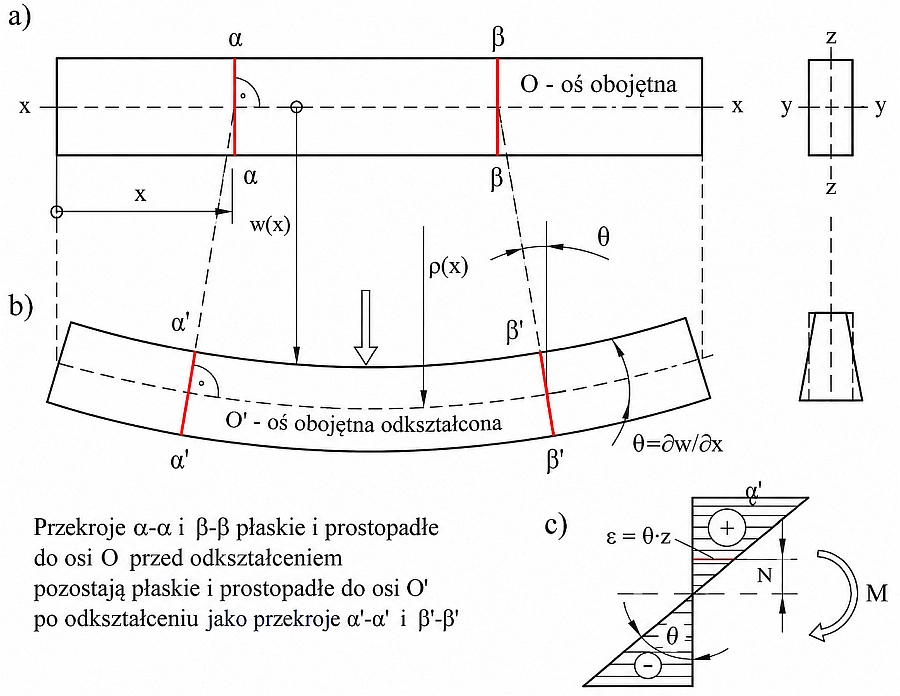
Rys.4. Belka Bernoulli-Euler: a) belka przed odkształceniem, b) belka po odkształceniu, c) rozkład odkształceń po wysokości przekroju zginanego
W modelu zakłada się, że na odkształcenia przekroju $\varepsilon$ mają wpływ jedynie naprężenia normalne wywołane momentem zginającym $M$, a pomija się naprężenia styczne. Konsekwencją takiego uproszczenia jest zasada płaskich przekrojów, a także liniowy rozkład odkształceń po wysokości przekroju, pokazany na rys. 4c. Z geometrii rysunku wynika, że odkształcenia włókien są proporcjonalne do ich odległości od osi obojętnej:
\[ \varepsilon(x,z)\propto z =\Theta \cdot z \tag{I.10} \label{I.10} \]
a współczynnik proporcjonalności zależy od lokalnego obrotu przekroju $\Theta(x)$.
Opis modelu belki
Na rys.5 zebrano ilustracje do wyprowadzenia równań rządzących zagadnieniem poprzecznego zginania belki Bernoulli-Euler.
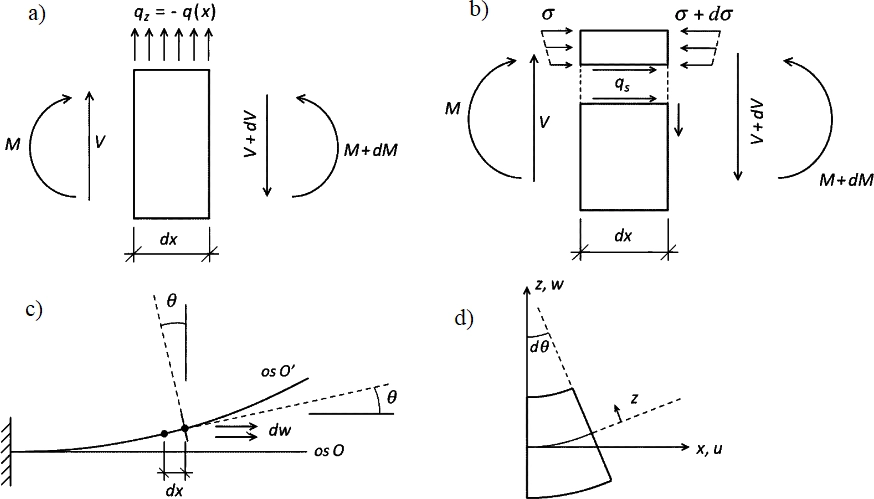
Rys.5. Równowaga elementu dx belki: a) równowaga elementu dx zginanego, b) równowaga elementu dx przy rozwarstwianiu, c) dodatnie ugięcie $w$ i kąt obrotu przekroju $Theta$ (opracowano na podstawie [11])
Rys. 5b nie jest ilustracją do oryginalnych analiz teorii Bernoulli-Euler, ale uzupełnia model oryginalny o analizę rozwarstwiania belki na skutek działania sił poprzecznych i w tym sensie jest elementem zmodyfikowanej teorii zginania belki Bernoulli-Euler.
Równania równowagi
Równania równowagi belki uzyskuje się, rozpatrując równowagę nieskończenie małego elementu belki dx, pokazanego na rys. 5a. Z warunku sumy rzutów na oś pionową ($\sum Z=0$) oraz sumy momentów ($\sum M=0$) otrzymujemy
\[ q_z=\cfrac{dV}{dx} \quad ; \quad V=\cfrac{dM}{dx}+(…) \tag{I.11} \label{I.11} \]
W równaniu (\ref{I.11}) pominięto człony wyższego rzędu względem $dx$, oznaczone symbolem (…).
Moment zginający $M=M_y$ uzyskuje się poprzez całkowanie naprężeń osiowych $\sigma=\sigma_x$ po całym przekroju poprzecznym $A$:
\[ M=\int\limits_A -\sigma \cdot z\, dA \tag{I.12}\label{I.12} \]
gdzie pojawia się znak minus, ponieważ naprężenia ściskające (ujemne) są w dodatnim obszarze osi z.
Ugięcia $w(x)$ i momenty zginające $M(x)$ są dodatnie gdy będą miały takie same zwroty i w związku z tym w technice umówiono się znakować $w$ i $M$ na podstawie wykresów w taki sposób, że znak momentu zginającego lub ugięcia jest dodatni, jeśli ich wykresy leżą po stronie spodu pręta. Powyższa umowa o znakowaniu prowadzi do pojęcia „spodu” belki, który na wykresach oznaczany jest najczęściej podkreśleniem linią przerywaną tej strony belki.
Równania fizyczne
W przypadku czystego zginania belki liniowo sprężystej obowiązuje jednoosiowe prawo Hooke’a wiążące naprężenia $\sigma=\sigma_x$ z odkształceniami $\varepsilon=\varepsilon_x$ w płaskim stanie naprężenia:
\[ \sigma=E\varepsilon\tag{I.13} \label{I.13} \]
W przypadku belki, w której odkształcenia w kierunku osi y są ograniczone (np. podciąg w płycie stropowej), z warunku zerowania się odkształceń poprzecznych $\varepsilon_y$ w dwuwymiarowym prawie Hooke’a otrzymujemy:
\[ \varepsilon_y= \cfrac{\sigma_y}{E} -\nu\cdot\cfrac{\sigma_x}{E} =0 \to \sigma_y=\nu\cdot\sigma_x \tag{I.14}\label{I.14} \]
i w tym przypadku bardziej odpowiednie jest stosowanie prawa fizycznego w postaci
\[ \varepsilon_x= \cfrac{\sigma_x}{E} -\nu\cfrac{\sigma_y}{E} \to \sigma_x= \cfrac{E}{1-\nu^2}\cdot\varepsilon_x \tag{I.15}\label{I.15} \]
czyli jak dla płaskiego stanu odkształceń.
Wszystkie poniższe wyprowadzenia i wyniki oparte są na prawie materialnym ($\ref{I.15}$). Prawo Hooke’a w postaci ($\ref{I.15}$) można w prosty sposób wprowadzić zastępując prosty moduł Younga $E$ przez moduł zastępczy $\overline E$:
\[ \overline E= \cfrac{E}{1-\nu^2} \tag{I.16} \label{I.16} \]
Równania geometryczne
Odkształcenia zginające prowadzą do skracania (powyżej osi obojętnej) lub wydłużania (poniżej osi) włókien w przekroju poprzecznym. Z rys. 5d odczytujemy, że odkształcenie włókien $\varepsilon=\varepsilon_x$ wynosi
\[ \varepsilon= \cfrac{du}{dx} \tag{I.17} \label{I.17} \]
Jednocześnie przemieszczenie osiowe $u$ jest powiązane z obrotem przekroju poprzecznego. Rozważmy nieskończenie mały obrót w kierunku przeciwnym do ruchu wskazówek zegara $d\Theta$ nieskończenie małego elementu belki $dx$ na rys. 5d. Przy okazji należy zauważyć, że krzywizna osi belki jest równa zmianie kąta obrotu przekroju na jednostkę długości, czyli
\[ \kappa=\cfrac{d\Theta}{dx}=\cfrac{I.1}{\rho}.\]
Z założenia płaskich przekrojów wynika, że odkształcenie każdego włókna w przekroju poprzecznym zmienia długość proporcjonalnie do swojej odległości od osi obojętnej. Stopień skrócenia lub wydłużenia zależy od obrotu przekroju poprzecznego. Rozważania geometryczne przeprowadzone na rys. 5d pokazują, że skrócenie lub wydłużenie, tj. przemieszczenie osiowe każdego nieskończenie krótkiego włókna wynosi
\[ du=-d\Theta\cdot z \tag{I.18}\label{I.18} \]
Obrót $\Theta$ jest powiązany z ugięciem, jak pokazano na rys. 5c. Z zależności geometrycznych i założenia małych obrotów $\Theta$ mamy:
\[ \tan\Theta= \cfrac{dw}{dx} \approx \Theta \tag{I.19} \label{I.19} \]
Połączenie przedstawionych wyżej zależności daje następujące równanie kinematyczne dla belki
\[ \varepsilon= \cfrac{du}{dx} = -\cfrac{d\Theta}{dx}\cdot z = -\cfrac{d^2w}{dx^2}\cdot z \tag{I.20} \label{I.20} \]
Uzyskaliśmy przybliżenie dokładnej krzywizny belki ($\ref{I.4}$) stosowane w technicznej teorii zginania:
\[ \kappa= \cfrac{I.1}{\rho} \approx |w”| \tag{I.21}\label{I.21} \]
co jest linearyzacją zależności (\ref{I.4}) dla $w’ \ll 1$
Podstawowe zależności technicznej teorii belek
W technicznej teorii zginania poprzecznego stosuje się zależności uzyskane dla problemu czystego zginania (mimo że poprzeczne zginanie jest innym przypadkiem niż zginanie czyste) w postaci:
- zlinearyzowanej (uzyskanej po odrzuceniu członów wyższego rzędu) zależności krzywizny od ugięcia belki
\[ \kappa= \cfrac{I.1}{\rho(x)} \approx |w”(x)| \tag{I.22} \label{I.22} \]
- zlinearyzowanej zależności krzywizny belki od momentu zginającego $M(x)$
\[ \kappa \approx \cfrac{|M(x)|}{EI_y} \tag{I.23} \label{I.23} \]
- i stąd zależność różniczkową na linię ugięcia belki
\[ w”(x) = -\cfrac{M(x)}{EI_y} \tag{I.24} \label{I.24} \]
- wyrażenia na naprężenia normalne przy zginaniu z połączenia ($\ref{I.3}$) i ($\ref{I.5}$), czyli ($\ref{I.8}$), w postaci
\[ \sigma_x= \cfrac{M(x)}{I_y}\cdot z \tag{I.25} \label{I.25} \]
a po wprowadzeniu pojęcia wskaźnika wytrzymałości przekroju
\[ W_y \stackrel{\rm def}{=} \cfrac{I_y}{\max z} \tag{I.26} \label{I.26} \]
gdzie: $\max z$ = maksymalna odległość włókna przekroju od osi obojętnej
Z ($\ref{I.25}$) mamy wzór na maksymalne naprężenie normalne w przekroju belki
[ \max \sigma_x= \cfrac{M(x)}{W_y} \tag{I.27} \label{I.27} \]
stanowiący jeden z najczęściej stosowanych wzorów wytrzymałości materiałów.
Uogólnienie teorii belki Bernoulli-Euler o naprężenia styczne. Wzór Żurawskiego
Teoria belki Euler-Bernoulli nie modeluje naprężeń stycznych w przekroju. Teoria zakłada, że płaskie przekroje pozostają płaskie i prostopadłe do osi obojętnej. Innymi słowy, jedynym występującym odkształceniem jest osiowe skrócenie lub wydłużenie włókien w przekroju poprzecznym. Brak ścinania wystąpi w przypadku zginania czystego lub prostego i na takie przypadki została opracowana teoria Bernoulli-Euler.
Natomiast w przypadku zginania poprzecznego siła poprzeczna wywołująca ścinanie wystąpi praktycznie w każdym przypadku (oprócz zginania momentem zginającym stałym na długości belki, bo siła poprzeczna jest pochodną momentu zginającego). Ograniczenie to usuwa teoria belki Timoshenko-Ehrenfest, w której uwzględnia się odkształcenia postaciowe wywołane naprężeniami stycznymi.
W tym rozdziale poprzestaniemy na analizie naprężeń ścinających $\tau$ oraz „siły rozwarstwiającej” $q_s$ w dowolnym punkcie przekroju poprzecznego. Rozważmy nieskończenie krótki element belki pokazany na rys. 5b, przecięty na wysokości $z$, gdzie działa siła rozwarstwiająca $q_s$.
Siła rozwarstwiająca $q_s$ jest siłą przypadającą na jednostkę długości belki, zapewniającą równowagę naprężeń normalnych $\sigma$ działających po obu stronach rozpatrywanego przekroju.
\[ q_s \cdot dx = \int\limits_{A_s} d\sigma \, dA = \int\limits_{A_s} \cfrac{dM}{I_y}\cdot z \, dA \tag{I.28} \label{I.28} \]
gdzie: $A_s$ jest polem przekroju poprzecznego powyżej przecięcia.
Wzór (\ref{I.32}) jest znany jako wzór Żurawskiego i stanowi podstawową zależność stosowaną do szacowania naprężeń stycznych w belkach.
Biorąc pod uwagę, że $ V=\cfrac{dM}{dx} $, otrzymujemy
\[ q_s= \cfrac{V}{I_y}\cdot\overline S_y \tag{I.29} \label{I.29} \]
gdzie moment statyczny odciętej części przekroju wynosi
\[ \overline S_y= \int\limits_{A_s} z\, dA \tag{I.30} \label{30} \]
W praktyce w celu wyznaczenia $\overline S_y$ przekrój poprzeczny jest często dyskretyzowany na kilka części o polu powierzchni $A_i$ i odległości $z_i$ od osi obojętnej do środka ciężkości części. Następnie wylicza się
\[ \overline S_y= \sum\limits_{i=1}^{N} A_i\cdot z_i \tag{I.31} \label{I.31} \]
przy czym każda z $N$ części przekroju należy do obszaru $A_s$.
Poziome naprężenia styczne rozwarstwiające odcięty przekrój wynoszą
\[ \tau= \cfrac{V\cdot\overline S_y} {I_y\cdot t} \tag{I.32} \label{I.32} \]
gdzie $t$ jest szerokością przekroju w miejscu przecięcia.
Należy zauważyć, że równania ($\ref{I.29}$) i ($\ref{I.32}$) są tylko przybliżeniami uzyskanymi w drodze wielokrotnych uproszczeń. Największą dokładność oszacowania uzyskuje się dla belki pryzmatycznej o prostej osi z równomiernym przekrojem poprzecznym i wówczas, gdy siła ścinająca działa równolegle do osi $z$, krawędzie przekroju są równoległe do tej osi, a przekrój jest wysoki i cienki. Takie warunki spełnia prostokąt, ale już nie przekrój trójkątny lub kołowy. Timoshenko i Goodier [12] stwierdzili, że dokładność wzoru Żurawskiego ($\ref{I.32}$) jest całkiem dobra nawet dla przekrojów kołowych i trójkątnych.
Dodatkowe wskazówki dotyczące wyznaczania naprężeń stycznych wynikają z warunków brzegowych teorii sprężystości oraz z równań równowagi przekroju poprzecznego. Wynika z nich, że:
• wektor naprężeń stycznych $\vec{\tau}$ jest styczny do konturu przekroju poprzecznego,
• na swobodnym konturze przekroju wartość naprężenia stycznego w kierunku normalnym do konturu jest równa zeru,
• suma momentów od naprężeń stycznych $\tau_{xy}$ i $\tau_{xz}$ względem środka ciężkości przekroju musi być równa zeru,
• dla przekrojów symetrycznych względem osi $z$ rozkład naprężeń stycznych jest również symetryczny względem tej osi,
• zwrot naprężeń stycznych $\tau_{xy}$ i $\tau_{xz}$ jest zgodny ze zwrotem siły poprzecznej $V_z(x)$.
Równanie różniczkowe zginania poprzecznego belki Bernoulli
Na podstawie analiz z poprzednich rozdziałów można już wyprowadzić równanie różniczkowe rządzące zagadnieniem zginania belki Bernoulli w następujący sposób:
\[ q_z = \cfrac{dV}{dx} = \cfrac{d^2M}{dx^2} = -\cfrac{d^2}{dx^2} \int_A \sigma \cdot z\, dA = -\cfrac{d^2}{dx^2} \int_A E\cdot\varepsilon\cdot z\, dA = -\cfrac{d^2} {dx^2} \int_A E\cdot\cfrac{d^2w}{dx^2}\cdot z^2\, dA = EI_y\cfrac{d^4w}{dx^4} \tag{I.33} \label{I.33} \]
gdzie wprowadzono definicję momentu bezwładności przekroju
\[ I_y \stackrel{\rm def}{=} \int_A z^2\, dA \tag{I.34}\label{34} \]
W równaniu ($\ref{I.33}$) zakłada się, że przekrój poprzeczny jest jednorodny, więc $E$ jest stałe w całym przekroju. W przypadku przekrojów złożonych (zespolonych lub kompozytowych) równanie ($\ref{I.33}$) przyjmie postać
\[ q_z= \cfrac{d^4w}{dx^4} \cdot \int_A E\cdot z^2\, dA \tag{I.35}\label{I.35} \]
W dobie komputeryzacji bezpośrednie rozwiązywanie równania różniczkowego zginania belki jest w praktyce inżynierskiej stosowane znacznie rzadziej niż metody numeryczne.
W praktyce inżynierskiej, warto jednak przestudiować jego rozwiązanie w prostych przypadkach odniesienia. W szczególności rozwiązanie równania różniczkowego stanowi punkt wyjścia do wyboru funkcji kształtu w metodzie elementów skończonych. Funkcje kształtu są często przybliżone, podczas gdy rozwiązanie równania różniczkowego ujawnia dokładny kształt, gdy element ulega odkształceniu. Ogólne rozwiązanie równania różniczkowego stanowi również punkt odniesienia do oceny dokładności funkcji kształtu stosowanych w metodzie elementów skończonych:
\[ w(x) = \cfrac{I.1}{I.24} \cfrac{q_z}{EI_y} \cdot x^4 + C_1x^3 + C_2x^2 + C_3x + C_4 \tag{I.36} \label{I.36} \]
Cztery stałe całkowania wyznacza się z warunków brzegowych, najczęściej po dwa na każdym końcu belki. Warunki te mogą dotyczyć ugięcia $w(x)$ lub jego pochodnych:
$\cfrac{dw}{dx}=\Theta$,
$EI_y\cfrac{d^2w}{dx^2}=M$,
$EI_y\cfrac{d^3w}{dx^3}=V$.
Rozwiązanie równania (\ref{I.33}) wraz z odpowiednimi warunkami brzegowymi pozwala wyznaczyć linię ugięcia belki $w(x)$. Funkcja ta opisuje geometryczny stan osi elementu i stanowi punkt wyjścia do wyznaczania krzywizn, odkształceń oraz naprężeń zgodnie z zależnościami (\ref{I.20})-(\ref{I.27}).
Klasyczna teoria Bernoulli-Euler stanowi fundament większości współczesnych teorii belkowych. Kolejne modele powstają przez stopniowe usuwanie jej ograniczeń. Teoria Timoshenko-Ehrenfest uwzględnia odkształcenia postaciowe wywołane naprężeniami stycznymi, teoria Własowa rozszerza opis o skręcanie i deplanację cienkościennych przekrojów otwartych, natomiast współczesne modele numeryczne uwzględniają dodatkowo duże przemieszczenia, nieliniowości materiałowe, imperfekcje geometryczne oraz złożone stany obciążenia. Pomimo tych rozszerzeń pojęcie linii ugięcia pozostaje jednym z podstawowych narzędzi opisu pracy elementów prętowych, a równanie różniczkowe belki Bernoulli-Euler stanowi punkt wyjścia do analizy większości zagadnień zginania spotykanych w praktyce inżynierskiej.
Literatura
- Rodrigo F. N., Comparison of Beam Theories for Cross Sectional Deflection Parameter Analysis of Euler, Timoshenko and Reddy Beam Theories, Bachelor Report, Eindhoven University of Technology, Department of Mechanical Engineering (Energy Technology), Eindhoven, July 1, 2023
- Szymczyk, M. (1981). Słownik języka polskiego. PWN
- Bańko, M. (Ed.). (2000). Inny słownik języka polskiego. PWN
- Wikipedia. (2013). Zginanie, [https://pl.wikipedia.org/w/index.php?title=Zginanie&oldid=37876761]
- Timoshenko S., Goodier J.N., Teoria sprężystości, Arkady Warszawa 1962
- Birger, I. A., & Panowko, J. G. (1968). Procnost, ustojcivost, kolebanija, Spravocnik (Vol. 1). Mosinostroejnije
- Tablice matematyczne, Mizerski W. (red.), Wydawnictwo Adamantan, Warszawa 2002
- Piechnik, St., Wytrzymałość materiałów dla wydziałów budowlanych. PWN, Warszawa-Kraków, 1980
- Piechnik, St., Wytrzymałość materiałów dla wydziałów budowlanych. PWN, Warszawa-Kraków, 1980
- Piechnik, S. (1980). Wytrzymałość materiałów dla wydziałów budowlanych. PWN
- Haukaas T., Euler-Bernoulli Beams, Lectures, The University of British Columbia, Vancouver, [terje.civil.ubc.ca]
- Timoshenko, S. P., Goodier, J. N. (1969). Theory of Elasticity. McGraw-Hill
________________________________



