
Trwa remanent po dużej awarii portalu. Przepraszam za nieczytelną część treści do zakończenia remanentu !
Artykuł w ciągu ostatnich 24 godzin czytało 7 Czytelników
Chodor L., Belki żelbetowe,, Encyklopedia πWiki, www.chodor-projekt.net,
13 lipca 2018 – 9 czerwca 2020 – ( publikacja kompletna)
Arkusz LCżelbet zawiera oryginalny kod – © wszelkie prawa zastrzeżone.
Leszek Chodor , E-mail lch@chodor-projekt.net ; tel. 881-949-956.
Część W
Wprowadzenie
Ze względu na obszerność artykuł podzielono na połączone rozdziały:
W Wprowadzenie (ten rozdział)
K Kształtowanie
Z Zginanie
P Pełzanie i skurcz
R Rysy i ugięcia
S Ścinanie i skręcanie
Przedstawiono kompedium wiedzy na temat projektowania i obliczania belek żelbetowych, a także komplet arkuszy kalkulacyjnych do obliczeń metodą nieliniową oraz porównanie z powszechnie stosowaną metodą uproszczoną. Stosowano spójną teorię żelbetu w autorskim ujęciu. Arkusz LCżelbet można pobrać poprzez kliknięcie na rys. W-1. Arkusz wymaga zainstalowania dodatku Solver w środowisku Excel.
Arkusz LCżelbet w wersji rys. W-1 i przykłady w niniejszym artykule – opublikowano w opcji „free”. Arkusz ten jest długo oczekiwany przez inżynierów budownictwa – zawarto w nim komplet wymagań z norm Eurokod z uwzględnieniem nieliniowości modelu żelbetu oraz pełzania, skurczu i zarysowań. W jednym algorytmie projektowane jest zbrojenie: belek zginanych ukośnie i ściskanych, słupów z dużym i małym mimośrodem. Przy tym w elementach ściskanych zaleca się wprowadzać do arkusza wartości sił przekrojowych z numerycznej analizy II rzędu z zastosowaniem metody nominalnej sztywności. Autor nie ponosi odpowiedzialności za niekompetentne, stosowanie arkusza.
W związku z licznymi problemami Użytkowników arkusz został zabezpieczony przed wprowadzaniem do niego niekontrolowanych modyfikacji. Odblokowanie do czytania formuł wpisanych w komórkach jest dostępne w wersji Premium, która może być udostępniona po uzgodnieniu telefonicznym lub e-mailowym na adres podany w nagłówku.
Uogólnienie arkusza dla innych kształtów przekrojów niż prostokątny oraz dla zbrojenia wielowarstwowego będzie wdrożony w kolejnych – komercyjnych wydaniach arkusza.
Wprowadzenie teoretyczne i wybrane przykłady rachunkowe dołączono do każdego rozdziału odrębnie, ale podstawowym przykładem jest opisana niżej sesja w programie.
Arkusz LCżelbet
Arkusz LCŻelbet można pobrać poprzez kliknięcie w obraz rys. W-1.
Rys. W-1. Arkusz LCżelbet w.1 1. Wersja „free”
Przypadki wytrzymałościowe pręta żelbetowego
W arkuszu LCżelbet w jednym algorytmie zawarto wszystkie przypadki wytrzymałościowe pręta żelbetowego, pokazane na rys. W-2 . Obejmuje więc belki, słupy, płyty i ściany
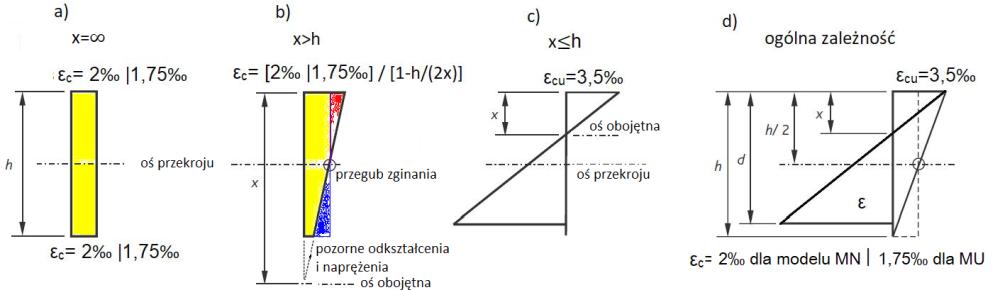
Rys. W-2. Przypadki wytrzymałościowe w pręcie żelbetowym
Pręty w konstrukcji są obciążone zginaniem i siłą osiową, dlatego nazywa się je belkami-słupami. W zależności od stopnia udziału zginania i ściskania można wydzielić przypadki pokazane na rys. W-2 :
a) CC∞ (Compression-Compression ∞) – odkształcenia górnej krawędzi i dolnej są tego samego znaku, a oś obojętna przekroju znajduje się w nieskończoności .
Jest to przypadek czystego ściskania przy braku zginania. Bryłę odkształceń oznaczono kolorem żółtym. Przypadek jest czysto teoretyczny, dotyczy słupów osiowo ściskanych i należy go rozpatrywać jako przekrój zespolony betonowo-stalowy.
b) CC x>h – odkształcenia górnej i dolnej krawędzi (górnego i dolnego zbrojenia) są tego samego znaku, a oś obojętna przekroju znajduje się poza przekrojem.
Jest to przypadek czystego ściskania z dodatkiem niewielkiego zginania. Bryłę odkształceń od zginania oznaczono kolorem czerwonym (ściskanie) i niebieskim (rozciąganie). Miejsce zerowe odkształceń (i naprężeń ) od zginania – umowny przegub oznaczono kółkiem. Naprężenia od ściskania i zginania sumują się, a wskutek tego powstaje pozorna bryła odkształceń i naprężeń poniżej dolnej krawędzi przekroju. Oś obojętna jet również pozorna. Wysokość strefy ściskanej x>h.
Taki przypadek często nazywa się małym mimośrodem, czyli przeważającym ściskaniem i dotyczy on większości słupów rzeczywistych – jest przedmiotem artykułu Słupy żelbetowe.
c) CT (Compression-Tension) – odkształcenia górnej krawędzi jest skróceniem a dolnej wydłużeniem (zbrojenie górne ściskane, dolne rozciągane). Wysokość strefy ściskanej mieści się w przekroju x≤ h. Taki przypadek nazywa się dużym mimośrodem, czyli przeważającym zginaniem i jest przedmiotem niniejszego artykułu.
d) TT (Tension-Tension) -oba zbrojenia rozciągane – powinno być rozważane jako rozciągany przekrój zespolony.
Przedstawiono kompedium wiedzy potrzebnej do zaprojektowania belki żelbetowej, ale także najważniejsze informacje dotyczące detali zbrojeniowych, zakotwienia i uciąglania belek, które w istocie stanowią wiedzę wymaganą od technologów i kreślarzy wykonawcy, opracowujących rysunki warsztatowe i powinny uzupełniać informacje zawarte w warunkach wykonania i odbioru konstrukcji betonowych [1]..
Projektowanie właściwe nie obejmuje umiejętności wykonywania rysunków roboczych (warsztatowych) , które przyjmują formę pokazaną na rys. W-6.
Rysunki warsztatowe są opracowywane przez wykonawców i ich technologów na podstawie wytycznych Projektanta zgodnie z zasadami opisanymi w artykułach Rysunek warsztatowy a projekt wykonawczy i Standard rysunku warsztatowego konstrukcji żelbetowej.
Projektowanie zbrojenia przekroju żelbetowego poddanego dwukierunkowemu zginaniu $M_y$, $M_z$ oraz siły osiowej $N_x$ dla modelu MN betonu (nieliniowego-parabolicznego) oraz modelu stali SP (Prandtla – idealnie sprężysto-plastycznego) można przeprowadzić w arkuszach kalkulacyjnych, który można pobrać poprzez kliknięcie na obraz rys. K-1. W kolejnych zakładkach skoroszytu zamieszczono arkusze do projektowania zbrojenia podłużnego oraz długości zakładów i zakotwienia prętów.
Beton i stal
W tab.W-1 zestawiono parametry betonów potrzebne do analizy zagadnienia opracowane na podstawie [2], tab.3.1 i [3].
Tab. W-1. Parametry betonów [2]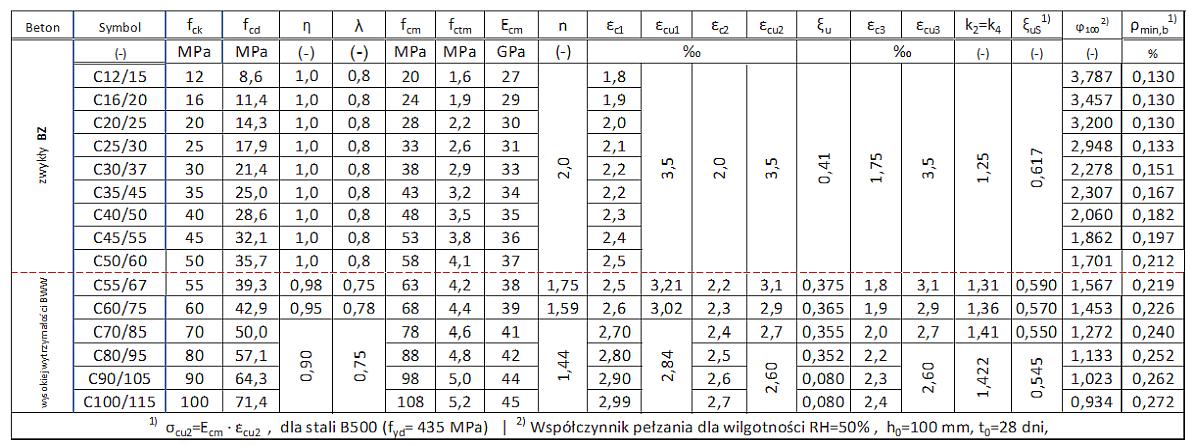 W dalszej części artykułu stosuje się podział betonów na betony zwykłe (BZ) i wysokiej wytrzymałości (BWW). W tab.1 podział jest zaznaczony czerwoną linią przerywaną. Wartości współczynnika pełzania $\varphi_{100}^{2)}$ uzyskano z własnego kalkulatora.
W dalszej części artykułu stosuje się podział betonów na betony zwykłe (BZ) i wysokiej wytrzymałości (BWW). W tab.1 podział jest zaznaczony czerwoną linią przerywaną. Wartości współczynnika pełzania $\varphi_{100}^{2)}$ uzyskano z własnego kalkulatora.
W obliczeniach konstrukcji żelbetowych stosuje się też wytrzymałość obliczeniową betonu na rozciąganie. Uzyskuje się ją z wytrzymałości średniej na rozciąganie $f_{ctm}$ (tab W-1) . Najpierw oblicza się kwantyl 5% wytrzymałości na rozciąganie z zależności $f_{ctk,0,05} =0,7 \cdot f_{ctm}$ [4], tab.3.1) , a następnie sprowadza do wartości obliczeniowej z zastosowaniem materiałowego współczynnika bezpieczeństwa $\gamma_c$, który w Polsce ma wartość 1,4
$$\begin{equation} f_{ctd}=0,7 \cdot f_{ctm} / 1,4 \label {1}\end{equation}$$
W tab. W-2 zestawiono najczęściej stosowane stale zbrojeniowe.
Tab.W-2. Najczęściej stosowane stale zbrojeniowe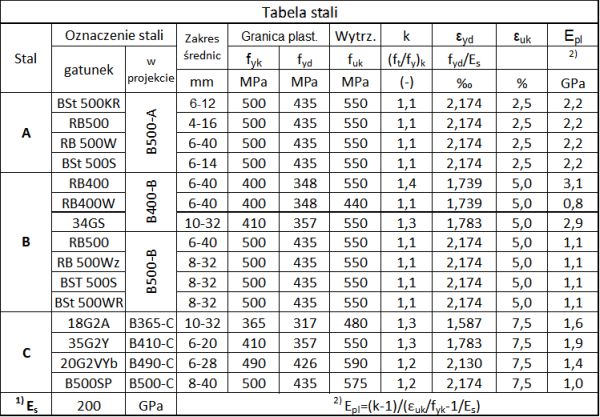
Przykład sesji w kalkulatorze LCżelbet
Sesja w kalkulatorze LCżelbet zostanie przedstawiona na przykładzie belki z rys.W-3. Belka jest elementem stropu z przykładu Z-1, gdzie przedstawiono więcej szczegółów i przeprowadzono dobór zbrojenia w przekroju przęsłowym A-B. W celu wstępnej prezentacji możliwości arkusza przyjęto, że belka w przekrojach A i B ma powiększona wysokość i jest w tych przekrojach zginana ukośnie momentami $M_y$ oraz $M_z$ i ściskana siłą $N_x$,a w rezultacie jest inaczej zbrojona, co ma swoje konsekwencje w ugięciu belki w stanie zarysowanym.
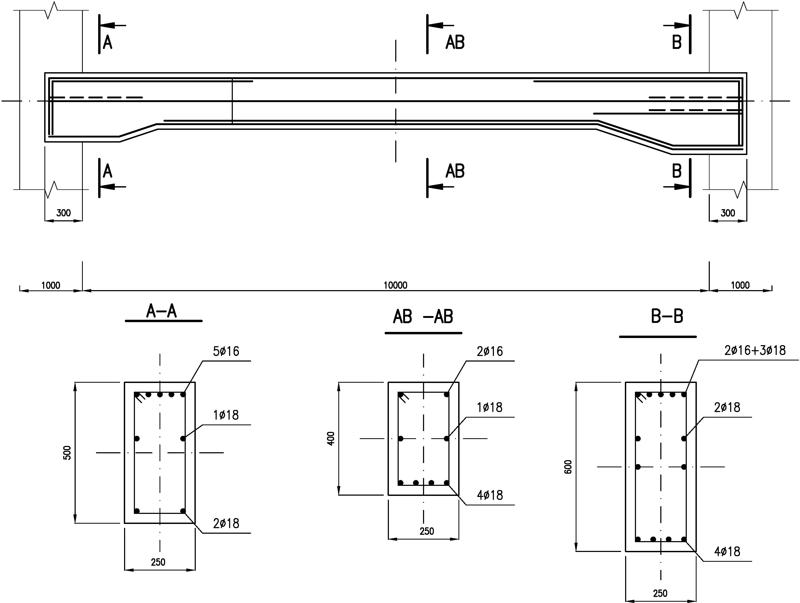
Rys.W-3 . Belka do prezentacji arkusza LCŻelbet (arkusz pobierzesz prze kliknięcie na rys.W-1)
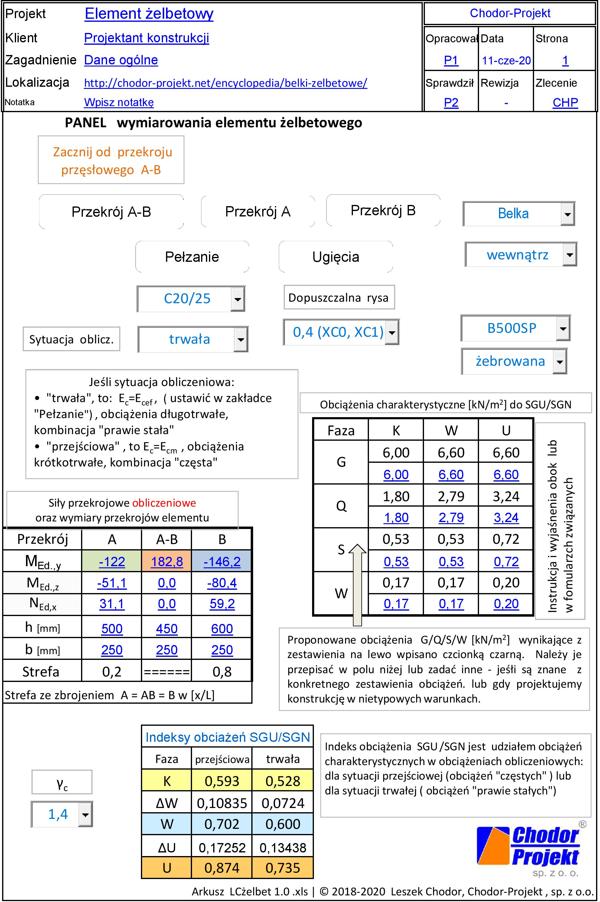
Wprowadzenie danych ogólnych
Wprowadzenie danych ogólnych należy przeprowadzić w zakładce ” ElementŻelbet”, pokazanej na rys. W-1. Wprowadzamy dane w pola wyróżnione niebieskim kolorem.
W nagłówku strony wpisujemy:
- Nazwę projektu (w miejsce Element żelbetowy”) – zmienna jest przenoszona na kolejne strony,
- Klient (kontrahent) – w miejsce „Projektant konstrukcji” – przenoszone
- Zagadnienie – opis zagadnienie , które jest badane na stronie dla Projektu – może być różne na każdej stronie,
- Lokalizacja ( w miejsce adresu strony www na której znajdziemy teorię do kalkulatora) wpisujemy dres inwestycji lub miejsce elementu w obiekcie – przenoszone,
- Notatka – miejsce na dodatkową notatkę – przenoszone,
- Chodor-Projekt – Pole przeznaczone na nazwisko projektanta lub biura projektów – przenoszone,
- Opracował – inicjały projektanta wykonującego obliczenia – przenoszone,
- Sprawdził – inicjały osoby sprawdzającej – przenoszone,
- Data – data pobierana z zegara komputera – przenoszone,
- Rewizja – symbol rewizji (jeśli wystąpił) – przenoszone,
- Zlecenie – symbol zlecenia – przenoszone.
W polach wyboru wybieramy kolejno;
- klasę betonu ( np C30/37)
- sytuację obliczeniową (np trwała) – Uwaga wybór ma skutki na rodzaj obciążeń , kombinacje obciążeń charakterystycznych oraz moduł betonu, jak opisano w ramce niżej pola wyboru.
- dopuszczalną rozwartość rysy zależną od klasy ekspozycji (np 0,4 )
- klasę stali (np 18G2A (AII))
- rodzaj prętów zbrojeniowych (np żebrowana)
- rodzaj elementu (np Belka) – Uwaga wybór ma wpływ na minimalne, maksymalne zbrojenie i inne ograniczenia specyficzne dla rodzaju elementu żelbetowego,
- otoczenie (np wewnątrz pomieszczeń)
W tabeli „Siły przekrojowe obliczeniowe oraz wymiary przekrojów” podajemy dane dla trzech charakterystycznych przekrojów belki: A – podporowego lewego, A-B – przęsłowego – najczęściej tego, w którym moment zginający jest maksymalny, B – podporowego prawego.
Dane z tabeli „Obciążenia charakterystyczne do SGU/SGN” oraz Indeksy obciążeń SGU/SGN są istotne wyłącznie przy sprawdzaniu zarysowania i ugięć. Dane proponowane w tych tabelach czarną czcionką są tak wyspecyfikowane, że są poprawne dla większości sytuacji projektowych. W sytuacjach specyficznych można wpisać swoje dane w tabeli „Obciążenia charakterystyczne do SGU/SGN” (pola udostępnione do edycji) lub w skróconych zestawieniach obciążeń zamieszczonych z prawej strony arkusza (pola O27:Y41), a na tej podstawie w tabeli O42:AH41 z formuł normowych wyznaczane są indeksy SGU/SGN, będące stosunkiem obciążeń charakterystycznych do obliczeniowych.
Współczynnik materiałowy dla betonu $\gamma_c=1,4$ przyjmuje się zgodnie polskim dodatkiem krajowym, a dla projektów na rynek europejski poza Polską zmieniamy go na $1,5 $.
Przyciski panelu służą do szybkiego przemieszczania się do innych zakładek: „Przekrój A-B” – dobór zbrojenia i sprawdzanie zarysowania dla przekroju przęsłowego „A-B” , „Przekrój A” dobór zbrojenia i sprawdzanie zarysowania dla przekroju podporowego „A” , „Przekrój B” dobór zbrojenia i sprawdzanie zarysowania dla przekroju podporowego „B” ,”Pełzanie” – wyznaczanie współczynników pełzania, „Ugięcia” – szacowanie linii ugięcia belki.
Projektowanie zbrojenia
W arkuszu można zaprojektować zbrojenie podłużne w trzech strefach belki:
- Strefa podporowa „A”, która rozciąga się od lewego końca belki $\xi_0= x/L=0$ do rzędnej określonej $\xi_A$ w tabeli „Siły przekrojowe” (np. $\xi_A =0,2$ )
- Strefa przęsłowa „A-B”, która rozciąga się od $\xi_A $ do $\xi_{A-B}$ (np $\xi_{A-B}=0,8$ )
- Strefa podporowa „B”, która rozciąga się od $\xi_{A-B}$ do końca belki $\xi_B =1$
Projektowanie każdego z trzech przekrojów tych stref odbywa się w podobnym arkuszu w zakładkach: Przekrój „A-B”, „A” lub „B” (patrz niżej na umiejscowienie zakładek w Excelu)
 W przypadku projektowania zbrojenia tylko w jednym przekroju symbol przekroju nie ma znaczenia. Zaprojektowanie wszystkich przekrojów jest potrzebne wyłącznie do oszacowania ugięcia belki.
W przypadku projektowania zbrojenia tylko w jednym przekroju symbol przekroju nie ma znaczenia. Zaprojektowanie wszystkich przekrojów jest potrzebne wyłącznie do oszacowania ugięcia belki.
Po przejściu do jednej z tych zakładek dobierzemy zbrojenie w danej strefie belki.
Dobór zbrojenia w przekroju A-B pokazano na rys Z-10, a w przekrojach podporowych A i B na rys. W-3. Arkusz kalkulacyjny można pobrać przez klikniecie na rys. W-1..
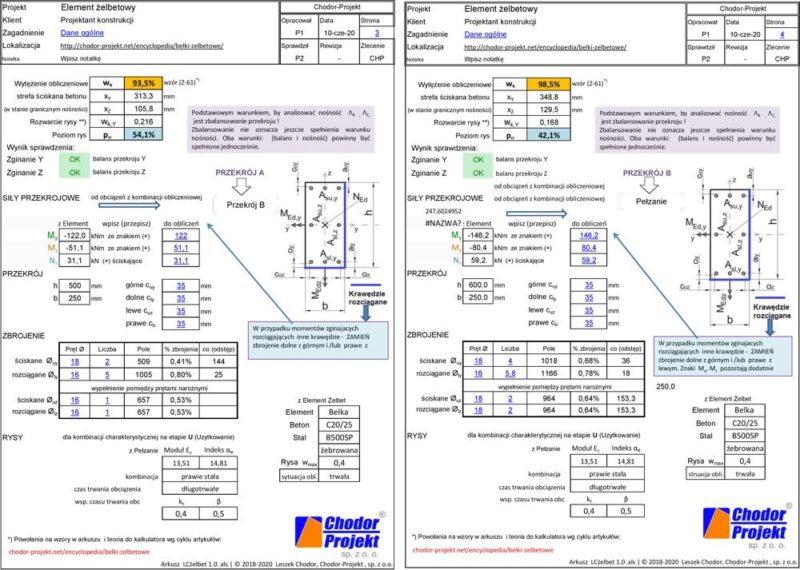
Rys. W-4. Kalkulator LCżelbet . Projektowanie przekrojów A, B (pobierz prze kliknięcie rys.1)
W bloku „Siły przekrojowe” mamy możliwość potwierdzenia lub zmiany sił zadanych w zakładce Element Żelbet. Zwykle najpierw potwierdza się siły, a w dalszej kolejności korygujemy je, aby zaobserwować, jaka jest nośność przekroju. dla zadanego zbrojenia.
W bloku „Przekrój” przypomniano wymiary przekroju zadane w „ElementPrzekrój”. W bloku tym należy wpisać otulenie zbrojenia „c”, to znaczy otulenie krawędziowe (od brzegu betonu do krawędzi pręta)
W bloku „Zbrojenie” należy wpisać średnice i liczby prętów przy poszczególnych krawędziach przekroju : „ly” – dolnej, „uy” – górnej, „lz” – prawej, „uz” – lewej, przy czym przy krawędziach bocznych zadaje się tylko pręty uzupełniające, położone pomiędzy zbrojeniem dolnym i górnym. Uwaga: krawędź dolna i prawa są krawędziami rozciąganymi przez momenty zginające.
Zbrojenie zadane w przykładzie pokazano na rys.2. Wyjaśnienia wymaga zadanie zbrojenia w przekroju B, w którym zbrojenie rozciągane w kierunku Y (jest to zbrojenie górne , ponieważ ten brzeg jest rozciągany ujemnym momentem zginającym) – zadano jak 5,8 ø16 , a faktycznie zastosowano zbrojenie mieszanymi średnicami 2 ø16 + 3 ø18 .
W przypadku zastosowania ze względów konstrukcyjnych mieszanych średnic (uzupełnienia zbrojenia przęsłowego) należy przeliczyć mieszane zbrojenie na liczbę prętów o wybranej średnicy z porównania pola przekroju, czyli dla liczby n1 prętów o średnicy $\varnothing_1$ i n2 prętów o średnicy $\varnothing_2$ mamy równoważną liczbę nr prętów o średnicy $\varnothing_1$:
$$\begin{equation} \cfrac{\pi} {4} \left( n_1 \cdot \varnothing_1^2 + n_2 \cdot \varnothing_2^2 \right) = \cfrac{\pi}{4} \cdot n_r \cdot \varnothing_1^2 \to n_r= n_1 + n_2 \cdot \left( \cfrac{\varnothing_2}{\varnothing_1}\right)^2 \label{2} \end{equation}$$
co w naszym przypadku daje $n_r =2+ 3\cdot \left ( \cfrac{18}{16}\right) ^2 = 5,8.$.
Po ustawieniu danych jak wyżej, sprawdzamy nośność przekroju poprzez kliknięcie w przycisk „Oblicz”. Następuje automatyczne zbalansowanie przekroju, tzn wyznaczenie stanu równowagi zarówno statycznej (sił) jak i kinematycznej (odkształceń). Wyniki obliczeń umieszczane są w polach:
$w_R$ – wytężenie obliczeniowe, czyli wytężenie przekroju w złożonym stanie naprężeń (ściskanie/rozciąganie i dwukierunkowe zginanie) w stanie granicznym nośności,
$x_Y$ – wysokość strefy ściskanej betonu po wysokości przekroju (od zginania względem osi Y),
$x_Z$ – wysokość strefy ściskanej betonu po szerokości przekroju (od zginania względem osi Z),
$w_k,Y$ [mm] – rozwarcie rysy od obciążeń charakterystycznych w zdefiniowanej sytuacji projektowej,
$p_{cr}$ – poziom rys, czyli rozwarcie rysy odniesione do wartości dopuszczalnej zdefiniowanej w zakładce „ElementŻelbet”.
Uzyskane wyniki będą wiarygodne wyłącznie wówczas, gdy nastąpi zbalansowanie przekroju, czyli w polach bloku „Wynik sprawdzenia” umieszczone będzie „OK” . W innym przypadku należy zmienić wymiary przekroju ) (szalunku) na większe lub ograniczyć siły przekrojowe. Czasami(ale rzadka) wystarczy zwiększyć lub zmniejszyć zbrojenie. Dopiero po zbalansowaniu przekroju możemy dobierać zbrojenie tak, by zarówno stan nośności jak i zarysowania był optymalny (bliski 100%).
W bloku „Rysy” zamieszczono informacyjnie moduł betonu (w praktyce stosujemy moduł efektywny) oraz stosunek modułów betonu i stali $\alpha_e=E_s/E_{c,ef}$ stosowany do obliczania zarysowania przekroju. Zarysowanie jest wyznaczane od obciążeń charakterystycznych 'częstych” na etapie U – użytkowania – eksploatacji) dla parametrów ustawionych w zakładce „Pełzanie”.
W arkuszu wstępnie prowadzono obliczenia metodą klasyczną (uproszczoną). Obliczenia te są dostępne po prawej stronie arkusza doboru zbrojenia. Można na przykład porównać wysokość strefy ściskanej z obliczeń uproszczonych z wysokością strefy ściskanej dla przekroju zbalansowanego. Różnice mogą być znaczne nawet kilkukrotne To świadczy o zawodności metod klasycznych i konieczności ich zastąpienia obliczeniami wykonywanymi na przykład w arkuszu LCżelbet.
Pełzanie i skurcz
W zakładce „Pelzanie” (rys.W-5) w bloku „Dane pełzania i skurczu” należy ustawić kalendarz wykonywania i eksploatacji elementu betonowego, liczony w dniach od rozpoczęcia wznoszenia elementu. czyli wiek betonu dla kilku zdarzeń:
$t_s$ zakończenia pielęgnacji betonu- od tego dnia liczy się skurcz betonu w elemencie
$t_o1$ obciążenia montażowego. jest to dzień w którym pozwolono na częściowe obciążenie elementu – obciążeniami montażowymi zgodnie z normą [5]. Nominalnie $t_{o1}$ może wystąpić od początku budowy $t=0$, ale element do czasu uzyskania częściowej nośności jest utrzymywane w szalunkach, więc $t_{o1}>0$ i $t_{o1}< t_d$ (od dnia osiągnięcia przez beton dojrzałości = stąd pozorna nieścisłość na schemacie zamieszczonym na stronie.
$t_d$ – osiągniecie przez beton dojrzałości – nominalnie jest to 28 dni, ale w szeregu przypadków dojrzałość osiąga starszy beton
$t_k$ – zakończenie wznoszenia elementu. W tym dniu następuje dociążenie elementu, czyli $t_k=t_{o2}$
$t_u$ – rozpoczęcie „normalnego” użytkowania elementu. W tym dniu następuje dociążenie elementu do poziomu obciążeń eksploatacyjnych, czyli $t_k=t_{o3}$
$t_\infty$ – zakończenie użytkowania podawane w latach ( w przykładzie 3 lata),
które jest automatycznie przeliczane na dni (poniżej).
W arkuszu dzień oceny pełzania i skurczu $t$ utożsamiany jest z okresem użytkowania, tzn. $t=t_\infty$. W tym ujęciu wiek betonu może być dowolny i różnić się od projektowego okresu użytkowania zdefiniowanego w normie [6].
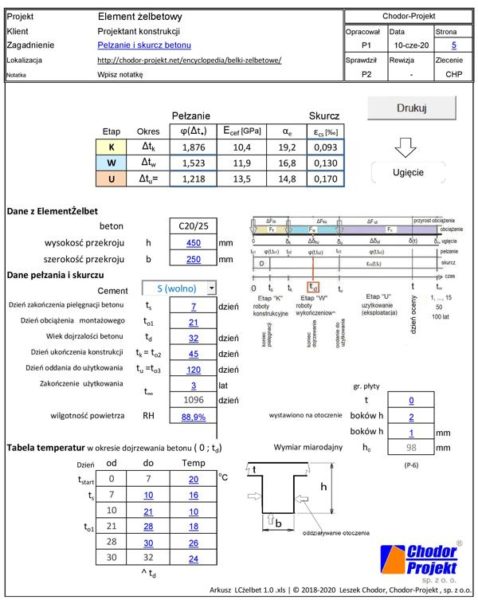
Rys. W-5 Kalkulator LCżelbet. Pełzanie i skurcz (pobierz prze kliknięcie rys.W-1)
Oprócz tego należy wybrać rodzaj cementu zastosowany do wykonania betonu, a także wilgotność otoczenia elementu RH w % . Przy braku dokładniejszych danych dla elementu eksploatowanego wewnątrz pomieszczenia (zdefiniowano w zakładce „ElementŻelbet) można ustawić RH_{in} =50%, dla elementu eksploatowanego na zewnątrz $Rh\approx 80$%, ale wg autora w warunkach Polski ustawiać $RH_{ext} =50$%.
W przypadku dojrzewania betonu w temperaturze różnej od 20oC, należy ustawić tabele w bloku „Tabele temperatur”
W bloku „Działanie otoczenia” należy zdefiniować liczbę boków elementu wystawionych na działanie otoczenia. Na tej podstawie wyznaczany jest miarodajny wymiar elementu $h_0$.
Ugięcia
W zakładce „Ugięcia” (rys.W-6) można wyznaczyć linię ugięcia zarysowanego, wyodrębnionego z konstrukcji elementu w kolejnych fazach wykonania i pracy.
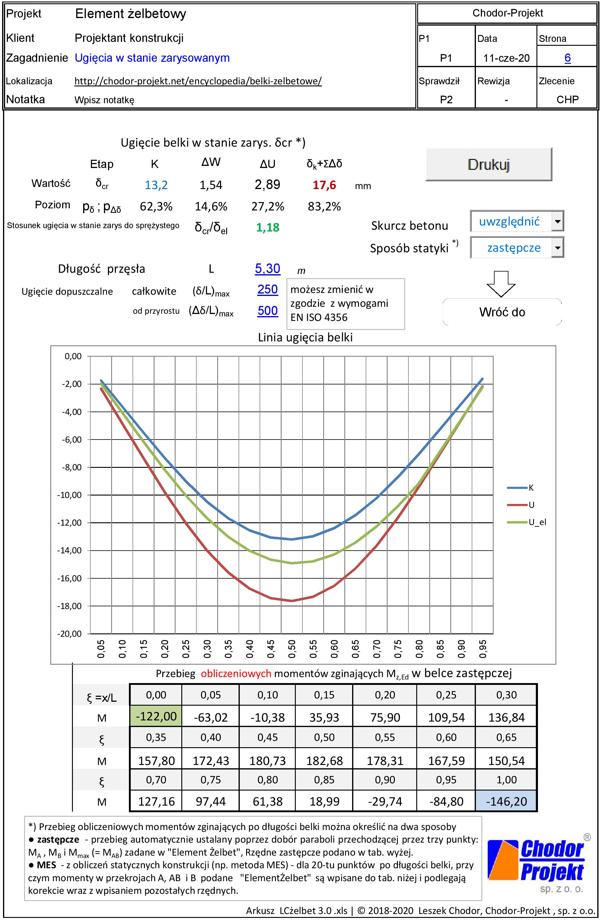
Rys.W-6 Kalkulator LCżelbet. Ugięcia. (pobierz prze kliknięcie w rys.W-1)
Należy wybrać:
- czy uwzględnić skurcz betonu – można uwzględnić lub pominąć ugięcie elementu od skurczu betonu wyznaczonego w zakładce „Pełzanie”
- jaką metodą wyznaczane jest pole momentów w elemencie
- zastępcze: wyznaczone parabola trzeciego rzędu przez trzy zadane wcześniej punkty: momenty podporowe $M_A$ i $M_B$ oraz moment maksymalny w przęśle $M_{max,AB}
- w przypadku znajomości z obliczeń statycznych (np. metodą MES) można wybrać „MES” i w tabeli poniżej ramki wpisać 20-ścia rzędnych znanych z obliczeń. Metoda MES jest dokładniejsza, ale wymaga poszerzonych obliczeń oraz wpisania do arkusza większej liczby danych. Powinna być stosowana w przypadku nieregularnego przebiegu momentów zginających na belce, np w przypadku zaburzonych warunków brzegowych, obciążenia znacznymi siłami skupionymi lub innych obciążeń nieregularnych.
Ponadto należy zadać długość obliczeniową elementu L oraz podzielniki dopuszczalnych ugięć:
- dla całkowitego ugięcia ( zwykle L/250),
- dla przyrostu ugięcia pomiędzy etapami pracy (od zwiększenia obciążenia) ( zwykle L/500).
Proponowane ugięcia dopuszczalne można zmienić, ale tak, by były zgodne z wymogami EN ISO 4356.
Po wpisaniu danych automatycznie skorygowane zostaną wykresy linii ugięcia dla etapów:
K – wznoszenia konstrukcji -ugięcie stanie zarysowanym,
U – eksploatacji – ugięcie końcowe w stanie zarysowanym,
U_el – ugięcie końcowe elementu sprężystego (jeśliby nie został zarysowany)
U góry strony umieszczone są strzałki ugięcia elementu w poszczególnych fazach pracy, a także stosunek $\delta_{cr} / \delta_{el}$ ugięcia w stanie zarysowanym $\delta_{cr}$ do ugięcia sprężystego $\delta_{el}$. Ten iloraz jest pokazany w celu szybkiego dokładniejszego oszacowania przemieszczeń elementów w stanie zarysowanym w danej konstrukcji na podstawi wyników MES dla konstrukcji sprężystej. W przykładzie wyniki klasycznych obliczeń należy przemnożyć przez 1,95.
Ścinanie – zbrojenie poprzeczne (strzemionami)
Na rys. W-7 przedstawiono arkusz do doboru zbrojenia poprzecznego strzemionami belki
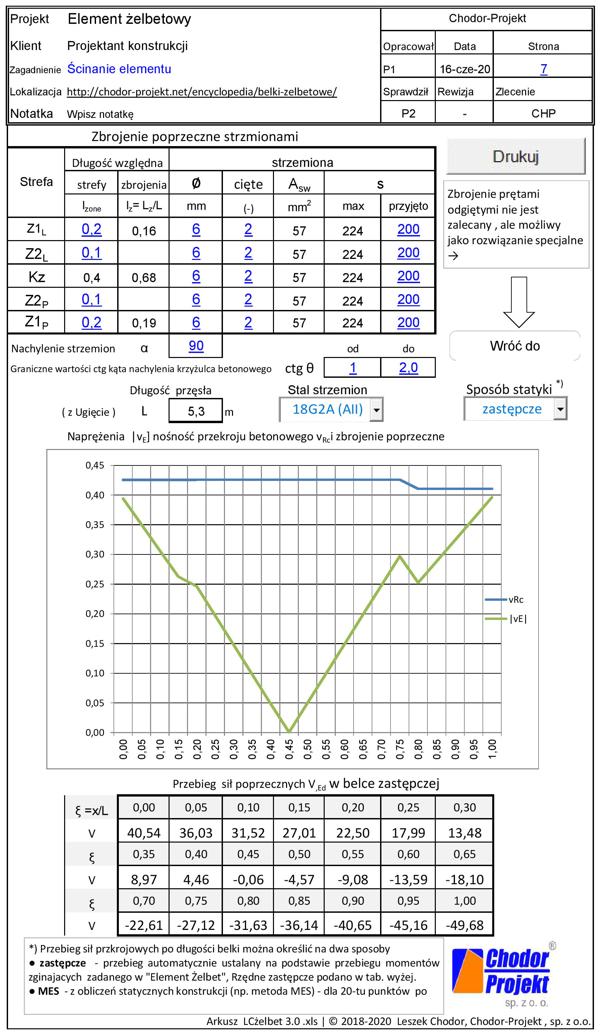
Rys.W-7 Arkusz LCżelbet. Ścinanie elementu żelbetowego (pobierz prze kliknięcie rys. W-1)
Sposób doboru strzemion opisany jest w instrukcji zamieszczonej po lewej stronie arkusza i przywołanym tam artykule
Kotwienie i zakłady zbrojenia
W zakładce „Kotwienie” (rys. W-8) można wyznaczyć wymagane długości zakładów oraz zakotwienia prętów zbrojeniowych w poszczególnych przekrojach elementu. Obsługa kalkulatora jest intuicyjna.
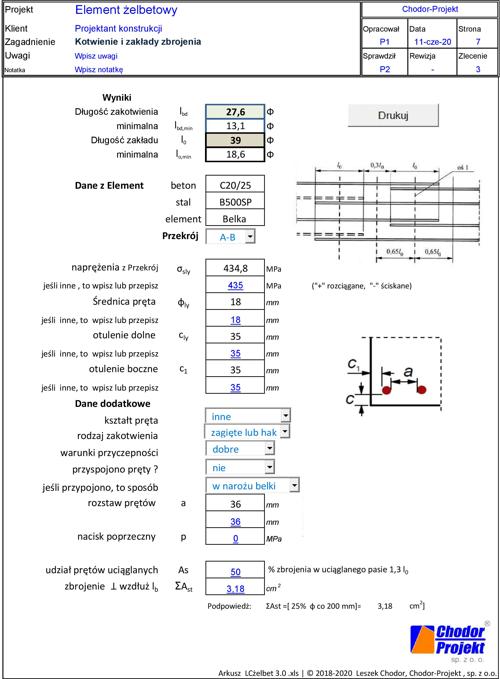
Należy wskazać, że kalkulator dotyczy tradycyjnego łączenia prętów przez zakład i kotwienia przez przyczepność do betonu, a nie obejmuje nowoczesnych, ekonomicznych sposobów uciąglania i kotwienia prętów za pomocą łączników mechanicznych.Literatura
- PN-EN 13670:2011, Wykonywanie konstrukcji z betonu
- PN-EN 1992-1+AC+Ap 1,2,3 :2008, Projektowanie konstrukcji z betonu, Część 1-1: Reguły ogólne i reguły dla budynków
- Pędziwiatr, J. (2010). Wstęp do projektowania konstrukcji żelbetowych wg PN-EN 1992-1-1:2008. Dolnośląskie Wydawnictwo Edukacyjne
- (PN-EN 1992-1+AC+Ap 1,2,3 :2008, Projektowanie konstrukcji z betonu, Część 1-1: Reguły ogólne i reguły dla budynków
- PN-EN 1991-1-6:2007, Eurokod 1: Oddziaływania na konstrukcje, Część 1-6: Oddziaływania ogólne. Oddziaływania w czasie wykonywania konstrukcji
- PN-EN 1990:2004, Eurokod: Podstawy projektowania konstrukcji
________________________________
Portale spolecznościowe
Wyślij
Musisz się zalogować, aby móc dodać komentarz.




Dzień dobry.
Czy kalkulatora żelbetu można używać w projektach komercyjnych?
Dzień dobry,
Jak w takim razie można uzyskać dostęp do kalkulatora?
Pozdrawiam
PS. Interesuje mnie najbardziej zagadnienie ukośnego zginania.
Dostęp do kalkulatora jest wolny. Należy pobrać arkusz przez Excel poprzez kliknięcie na obraz. Kalkulator pracuje w środowisku arkusza Excel z zainstalowanym dodatkiem Solver.