
Leszek Chodor, 16 maja 2016
2026-05-20 przywrócenie artykułu po poważnej awarii portalu
2026-06-02 Dodano współczesne formuły zmęczeniowe
W przypadku nieczytelnych treści, proszę powiadomić: leszek@chodor.co
W ciągu ostatnich 24 godzin z artykułu korzystało 10 Czytelników
Elementy i połączenia podlegające znacznej liczbie zmian naprężeń należy sprawdzić – oprócz podstawowych warunków nośności (SGN) i użytkowalności (SGU) – również w stanie granicznym zmęczenia (SGF). Zgodnie z normą PN-EN 1993-1-9 [1] w przypadku zmęczenia wysokocyklowego (HCF – High-Cycle Fatigue) możliwe są dwa podejścia: metoda naprężeń nominalnych oraz metoda naprężeń geometrycznych (gorącego punktu), z których każda operuje wyłącznie na naprężeniach w zakresie sprężystym.
W przypadku zmęczenia niskocyklowego (LCF – Low-Cycle Fatigue) analizę należy opierać na odkształceniach sprężysto-plastycznych. Norma [1] odcina się od tego zagadnienia, wskazując, że stosowanie standardowych procedur HCF jest niedozwolone w przypadkach, gdy zakres naprężeń wywołuje lokalne uplastycznienia przekraczające granicę sprężystą materiału.
W wielu sytuacjach spotykanych w budownictwie przemysłowym – na przykład przy projektowaniu estakad dla bardzo ciężkich suwnic procesowych,w tym suwnic chwytakowych stosowanych w hutach. Lokalny docisk koła do pasa górnego może generować naprężenia przekraczające granicę plastyczności stali ($f_y$). Konstrukcja przechodzi wówczas w zakres zmęczenia sprężysto-plastycznego. W takim przypadku projektant zmuszony jest odstąpić od standardowych tabelarycznych klas detali (FAT) i przeprowadzić zaawansowaną, nieliniową analizę metodą elementów skończonych (MES), bazującą na kryteriach odkształceniowych.
Zmęczenie nisko- i wysoko-cyklowe
W rozdziale podano najważniejsze współczesne ustalenia zawarte w pracy przeglądowej opublikowanej w nowoczesnej formie na platformie internetowej CAEflow [2].
Różnice w inicjacji i propagacji pęknięć przy zmęczeniu wysoko- i przy nisko-cyklowym
W wyżej wymienionej pracy podkreślono rozróżnienie zmęczenia wysokocyklowego (HCF) z niskocyklowego (LCF), co jest z różnej inicjacji i propagacji pęknięć:
1) W przypadku zmęczenia wysokocyklowego HCF, inicjacja pęknięć decyduje o całkowitej trwałości zmęczeniowej. Wady powierzchniowe, wtrącenia i koncentracje naprężeń pełnią rolę miejsc zarodkowania, w których po milionach cykli naprężeń sprężystych tworzą się mikroskopijne pęknięcia. Faza propagacji jest stosunkowo krótka w porównaniu z inicjacją. Stan powierzchni staje się niezwykle ważny – hartowanie powierzchniowe i walcowanie na zimno wprowadzają korzystne naprężenia ściskające, które poprawiają odporność zmęczeniową,
2) Zmęczenie niskocyklowe LCF odwraca tę zależność. Znaczne odkształcenie plastyczne w cyklu przyspiesza inicjację pęknięć, przez co faza propagacji stanowi znaczącą część całkowitego okresu użytkowania. Ma to bezpośredni wpływ na częstotliwość przeglądów i podejście do tolerancji uszkodzeń – elementy LCF mogą wymagać częstszych przeglądów po wykryciu pęknięć, ponieważ propagacja postępuje szybciej w porównaniu z całkowitym okresem użytkowania.
Progi cykli definiujące granicę HCF-LCF
Zmęczenie niskocyklowe zazwyczaj obejmuje awarie występujące poniżej 10 000 cykli (10⁴), natomiast zmęczenie wysokocyklowe opisuje awarie występujące między 10 000 a 10 milionami cykli (10⁴–10⁷). Strefa przejściowa między 1000 a 10 000 cykli wymaga dokładnej analizy składowych odkształceń w celu określenia dominującego mechanizmu.
Poszczególne gałęzie techniki stosują jednak własne, praktyczne granice pomiędzy LCF i HCF, dostosowane do charakteru obciążeń oraz wymagań bezpieczeństwa. Te granice przedstawiono w tab.1.
Przedstawione wartości mają charakter orientacyjny i odzwierciedlają praktykę stosowaną w poszczególnych gałęziach techniki. Granica pomiędzy zmęczeniem niskocyklowym (LCF) i wysokocyklowym (HCF) nie jest jednoznaczna i zależy zarówno od liczby cykli, jak i od udziału odkształceń plastycznych, i może być różnie przyjmowana w w zastosowaniach branżowych.
Tab. 1 Liczba cykli dla zmęczenie niskocyklowego LCF i wysokocyklowego HCF w różnych branżach
\[ \begin{array}{|c|c|c|c|} \hline \text{Przemysł} & \text{Próg LCF} & \text{Zakres HCF} & \text{Racjonalne uzasadnienie} \\ \hline \begin{array}{c} \text{Lotnictwo i} \\ \text{kosmonautyka} \end{array} & 10^{3} & 10^{3}-10^{7} & \begin{array}{c} \text{Konserwatywne podejście do elementów obrotowych} \\ \text{o znaczeniu krytycznym dla bezpieczeństwa} \end{array} \\ \hline \begin{array}{c} \text{Generowanie} \\ \text{energii} \end{array} & 10^{4} & 10^{4}-10^{7} & \begin{array}{c} \text{Próg standardowy dla elementów turbin,} \\ \text{kotłów i instalacji energetycznych} \end{array} \\ \hline \text{Motoryzacja} & 10^{4} & 10^{4}-10^{6} & \begin{array}{c} \text{Równowaga między trwałością} \\ \text{a optymalizacją masy konstrukcji} \end{array} \\ \hline \begin{array}{c} \text{Urządzenia} \\ \text{ciśnieniowe} \end{array} & 10^{4} & 10^{4}-10^{6} & \begin{array}{c} \text{Klasyfikacja oparta na standardzie ASME} \\ \text{i normach projektowych} \end{array} \\ \hline \begin{array}{c} \text{Przemysł hutniczy} \\ \text{i urządzenia przeładunkowe} \end{array} & 10^{4} & 10^{4}-10^{7} & \begin{array}{c} \text{Duże obciążenia zmienne od suwnic procesowych,} \\ \text{chwytakowych i urządzeń transportu technologicznego} \end{array} \\ \hline \begin{array}{c} \text{Energetyka} \\ \text{wiatrowa} \end{array} & 10^{4}-10^{5} & 10^{5}-10^{8} & \begin{array}{c} \text{Bardzo duża liczba cykli obciążeń od wiatru} \\ \text{w całym projektowym okresie eksploatacji} \end{array} \\ \hline \begin{array}{c} \text{Konstrukcje offshore} \\ \text{i morskie} \end{array} & 10^{4}-10^{5} & 10^{5}-10^{8} & \begin{array}{c} \text{Dominują długotrwałe obciążenia od falowania,} \\ \text{wiatru i drgań eksploatacyjnych} \end{array} \\ \hline \begin{array}{c} \text{Konstrukcje budowlane} \\ \text{(kominy, belki} \\ \text{podsuwnicowe, mosty)} \end{array} & 10^{4}-10^{5} & 10^{5}-10^{8} & \begin{array}{c} \text{Dominują obciążenia eksploatacyjne} \\ \text{o dużej liczbie cykli} \\ \text{(suwnice, wiatr, drgania komunikacyjne)} \\ \text{w całym okresie użytkowania obiektu} \end{array} \\ \hline \end{array} \]
W przeciwieństwie do lotnictwa lub motoryzacji, gdzie istotną rolę odgrywa zmęczenie niskocyklowe związane z dużymi zakresmi odkształceń, większość konstrukcji budowlanych projektowana jest w zakresie wysokocyklowym (HCF), obejmującym od
do
cykli obciążenia.
Granica pomiędzy LCF a HCF odpowiada przejściu od dominacji odkształceń plastycznych do zakresu sprężystego.
Większość analiz zmęczeniowych konstrukcji budowlanych dotyczy zakresu HCF.
Zakres cykli 10³–10⁴ (strefa przejściowa pomiędzy LCF a HCF) stanowi prawdziwe wyzwanie analityczne, ponieważ zarówno odkształcenia sprężyste, jak i plastyczne znacząco przyczyniają się do uszkodzeń zmęczeniowych. W pobliżu granicy 10⁴ cykli udział odkształceń plastycznych stopniowo maleje, a dominującą rolę zaczynają odgrywać odkształcenia sprężyste..
W pobliżu granicy pomiędzy LCF i HCF materiały mogą wykazywać mieszane zachowanie sprężysto-plastyczne, mimo że przy większych trwałościach dominuje odpowiedź sprężysta. Poprawne uwzględnienie zachowania sprężysto-plastycznego wymaga połączenia podejścia Basquina opartego na naprężeniu z podejściem Coffina-Mansona opartym na odkształceniu. W podejściu odkształceniowym można dokładnie scharakteryzować pełną zależność trwałości zmęczeniowej w funkcji liczby cykli. W analizie reżimu przejściowego, łączone podejścia, takie jak Morrow lub Smith-Watson-Topper (SWT), zapewniają dokładniejsze prognozy, uwzględniając obie składowe odkształcenia.
Częstym błędem jest stosowanie metod LCF dla elementów w zakresie przejściowym, ponieważ „to prostsze”. Takie podejście często prowadzi do niekonserwatywnych prognoz trwałości, gdy wkład odkształceń plastycznych jest znaczący.
W przypadku zmęczenia HCF inżynierowie zazwyczaj charakteryzują zachowanie zmęczeniowe, korzystając z podejścia naprężeniowego z równania potęgowego Basquina, które ustanawia liniową zależność pomiędzy amplitudą naprężenia a liczbą cykli do zniszczenia na wykresie logarytmicznym. Podejście naprężeniowe wymusza stosowanie zasad:
- Granica wytrzymałości : W przypadku niektórych materiałów – zwłaszcza stopów żelaza, takich jak stale węglowe – krzywa SN stabilizuje się przy naprężeniu progowym, poniżej którego materiał teoretycznie może przetrwać nieograniczoną liczbę cykli bez uszkodzenia zmęczeniowego. W przypadku stali miękkich granica ta zazwyczaj mieści się w przedziale 45–50% wytrzymałości na rozciąganie, podczas gdy stale średniowęglowe mogą osiągnąć 55% wytrzymałości na rozciąganie.
Współcześnie przyjmuje się, że rzeczywista nieskończona trwałość zmęczeniowa nie istnieje, natomiast dla wielu stali konstrukcyjnych obserwuje się praktyczną granicę zmęczenia - Korekty naprężeń średnich : Naprężenia średnie mają istotny wpływ na zachowanie HCF. Dostępne metody korekcji obejmują metody Soderberga, Goodmana, Gerbera, Morrowa i Smitha-Watsona-Toppera. Wybór odpowiedniej metody korekcji ma istotny wpływ na obliczenia trwałości zmęczeniowej.
- Krzywe odkształcenia i trwałości do analizy zmęczenia niskocyklowego
Analiza LCF opiera się na zależności Coffina-Mansona, opracowanej niezależnie w wyniku badań LF Coffina i SS Mansona na początku lat 50. XX wieku. Wkład Mansona wynikał z szeroko zakrojonych badań jednoosiowych, które ujawniły empiryczną korelację między zakresem odkształceń plastycznych a trwałością zmęczeniową.
Fundamentalne równania zmęczenia materiałów
Fundamentalnymi pracami z zakresu zmęczenia materiałów, a szczególnie stali są:
Wöhler (1867, 1870) [3], [4] – fundament HCF (krzywe S-N),
Basquin (1910) [5] – matematyczny opis HCF,
Manson (1953) [6] – fundament LCF,
Coffin (1954) [7]– niezależne sformułowanie prawa niskocyklowego zmęczenia materiałów,
Ramberg–Osgood (1943) [8] – model cyklicznej zależności naprężenie–odkształcenie,
Paris–Erdogan (1963) [9] – teoria propagacji pęknięć zmęczeniowych,
Morrow (1965) [10] – energia odkształcenia i poprawki na naprężenie średnie,
Smith–Watson–Topper (1970) [11] – parametr Smith–Watson–Topper (SWT), który obecnie jest jednym z najczęściej stosowanych modeli LCF/HCF.
Wöhler podał podstawowe zależności zmęczenia wysokocyklowego, wiążące zakres zmienności naprężeń $S=\Delta\sigma$ z liczbą cykli $N$:
\[ \tag{1}\label{Wohler} S=f(N) \]
gdzie:
$S =\Delta\sigma$ – zakres naprężenia,
$N$ – liczba cykli do zniszczenia.
Basquin zaproponował matematyczny opis krzywej Wöhlera w postaci
\[ \tag{2}\label{Basquin} \sigma_a = \sigma_f'(2N_f)^b \]
gdzie:
$\sigma_a$ – zakres naprężenia,
$\sigma_f’$ – współczynnik wytrzymałości zmęczeniowej,
$b$ – wykładnik zmęczeniowy,
$N_f$ – liczba cykli do zniszczenia.
Manson i Coffin niezależnie zaproponowali dla opisu dla zmęczenia niskocyklowego zależność opartą na amplitudzie odkształceń plastycznych:
\[ \tag{3}\label{M-C} \frac{\Delta\varepsilon_p}{2}= \varepsilon_f'(2N_f)^c \]
gdzie:
$\Delta\varepsilon_p$ – zakres odkształceń plastycznych,
$\varepsilon_f’$ – współczynnik plastyczności zmęczeniowej,
$c$ – wykładnik zmęczeniowy.
Połączenie zależności Basquina oraz Coffina–Mansona doprowadziło do sformułowania równania obejmującego zarówno zakres nisko-, jak i wysokocyklowy:
\[ \tag{4}\label{B-C-M} \frac{\Delta\varepsilon}{2} = \frac{\sigma_f’}{E}(2N_f)^b + \varepsilon_f'(2N_f)^c \]
gdzie:
$E$ – moduł Younga.
Do opisu cyklicznej zależności naprężenie–odkształcenie powszechnie stosowany jest model Ramberga–Osgooda:
\[ \tag{5} \frac{\Delta\varepsilon}{2} = \frac{\Delta\sigma}{2E} + \left( \frac{\Delta\sigma}{2K’} \right)^{1/n’} \label{Ramberg}\]
gdzie:
$K’$ – współczynnik umocnienia cyklicznego,
$n’$ – wykładnik umocnienia cyklicznego.
W przypadku konstrukcji zawierających istniejące mikropęknięcia lub w analizie trwałości resztkowej wykorzystuje się prawo Parisa–Erdogana opisujące prędkość propagacji pęknięcia zmęczeniowego:
\[ \tag{6} \frac{da}{dN} = C (\Delta K)^m \label{Paris} \]
gdzie:
$a$ – długość pęknięcia,
$\Delta K$ – zakres współczynnika intensywności naprężeń,
$C,m$ – stałe materiałowe.
Morrow zaproponował modyfikację równania odkształceniowego uwzględniającą wpływ naprężenia średniego:
\[ \tag{7} \frac{\Delta\varepsilon}{2} = \frac{\sigma_f’-\sigma_m}{E}(2N_f)^b +
\varepsilon_f'(2N_f)^c \label{Morrow} \]
gdzie:
$\sigma_m$ – naprężenie średnie cyklu obciążenia.
Rozwinięciem tej koncepcji jest parametr Smitha–Watsona–Toppera (SWT), stanowiący jedno z najczęściej stosowanych kryteriów trwałości zmęczeniowej przy niezerowym naprężeniu średnim:
\[ \tag{8} \sigma_{\max}\frac{\Delta\varepsilon}{2} = \frac{(\sigma_f’)^2}{E}(2N_f)^{2b} + \sigma_f’\varepsilon_f'(2N_f)^{b+c} \label{SWT}\]
gdzie:
$\sigma_{\max}$ – maksymalne naprężenie w cyklu obciążenia.
Przedstawione zależności stanowią podstawę współczesnej analizy zmęczeniowej materiałów konstrukcyjnych, obejmując zarówno zmęczenie wysokocyklowe (HCF), niskocyklowe (LCF), jak i zagadnienia propagacji pęknięć zmęczeniowych.
Na rys. 1 pokazano wykres krzywej życia zmęczeniowego (Strain-Life Curve) dla znormalizowanej stali konstrukcyjnej wyższej jakości SAE 1045 (odpowiednik europejskiej stali węglowej C45). Prezentuje on kluczową dla inżynierii zależność między całkowitą amplitudą odkształcenia (Δε/2) a liczbą cykli do zniszczenia (N), opisaną równaniem Coffina-Mansona-Basquina($\ref{B-C-M}. Wykres jest współczesną krzywą uzyskaną numerycznie na potrzeby specjalistycznego artykułu technicznego na blogu inżynierskim [12]
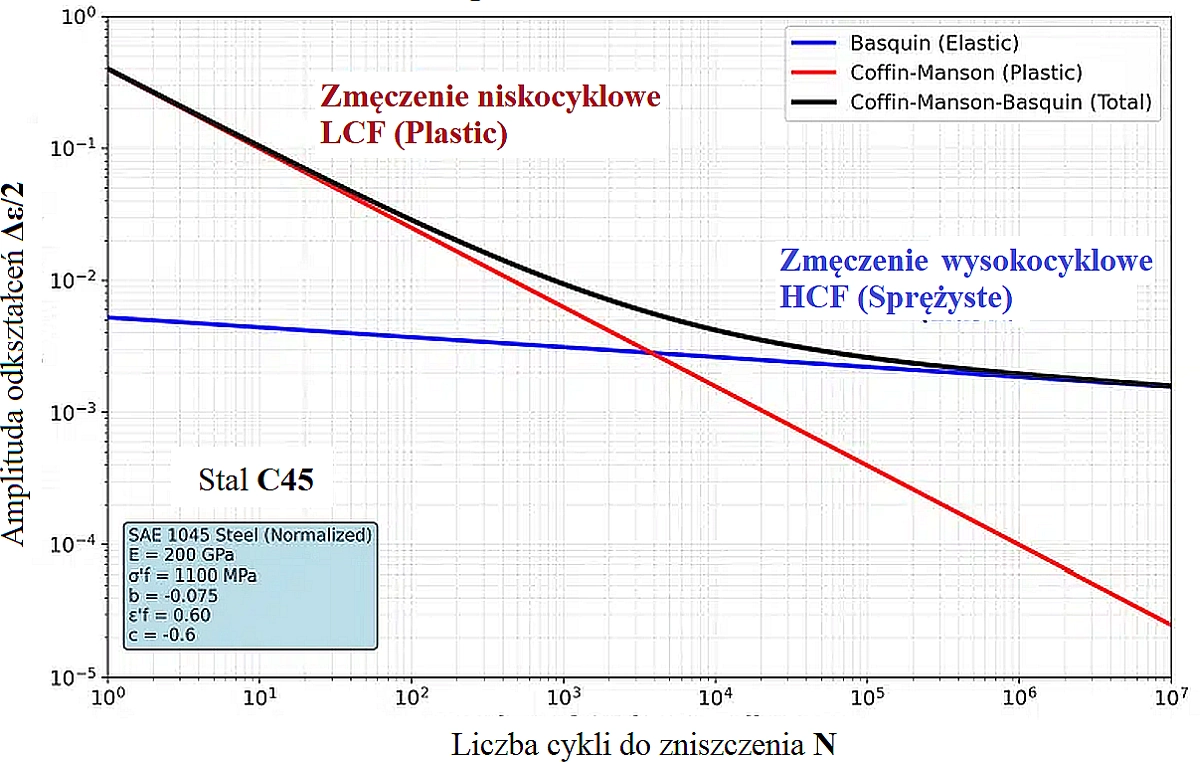
Rys. 1 Krzywa życia zmęczeniowego Goffin+Mason-Basquin [12]
Wykres opiera się na klasycznym, połączonym równaniu odkształceniowym ($\ref{4}$).
W przedziale niskocyklowym (oznaczonym bordowym opisem Low-Cycle Fatigue po lewej stronie, poniżej 103–104 cykli), czarna krzywa odkształcenia całkowitego niemal idealnie pokrywa się z czerwoną linią prostą. Oznacza to, że w tym reżimie pracy za niszczenie materiału (np. pasa górnego belki podsuwnicowej przy lokalnym docisku) odpowiadają niemal wyłącznie nieodwracalne odkształcenia plastyczne.
Po prawej stronie wykresu (powyżej 105 cykli – strefa High-Cycle Fatigue) sytuacja się odwraca. Czerwona linia odkształceń plastycznych gwałtownie spada, a czarna krzywa pokrywa się z niebieską linią prostą odpowiadającą za pracę czysto sprężystą.
Punkt przejścia (Transition Life): Miejsce przecięcia się linii niebieskiej (sprężystej) i czerwonej (plastycznej) – w tym przypadku w okolicy 3⋅103 cykli – to tzw. przejściowa trwałość zmęczeniowa. Pokazuje ona moment, w którym obie składowe (sprężysta i plastyczna) mają dokładnie taki sam udział w procesie niszczenia stali.
Dla projektanta konstrukcji budowlanej wykres ten jest jasnym dowodem na to, dlaczego przy małej liczbie cykli o dużej amplitudzie (np. ciężki docisk koła suwnicy, sejsmika) analiza samych naprężeń sprężystych (linia niebieska) prowadziłaby do katastrofalnego niedoszacowania rzeczywistego wytężenia materiału.
Zmęczenie wysokocyklowe HCF
Analiza naprężeń w karbie
Definicje podstawowe
Zmęczenie wywoływane jest zmieniającymi się naprężeniami. Przebieg zmienności naprężeń w czasie nazywany jest widmem naprężeń.
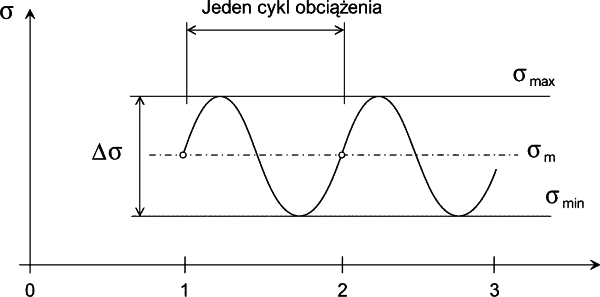
Najprostszym przykładem zmienności naprężeń jest widmo jednorodne, czyli widmo naprężeń o stałej amplitudzie , które jest charakteryzowane wartościami naprężeń maksymalnych $\sigma_{max}$ oraz minimalnych $\sigma_{min}$ w poszczególnych cyklach , oraz zakresem zmienności (amplitudą). Zakres zmienności naprężeń (normalnych $\sigma$ oraz stycznych $\tau$ przyjmuje się jako algebraiczną różnicę maksymalnego i minimalnego naprężenia w rozpatrywanym punkcie konstrukcji, a naprężenie średnie jako średnią arytmetyczną tych naprężeń (rys.2)
\[ \Delta \sigma = (\sigma_{max}- \sigma _{min}) \; \hspace{1 cm} \Delta \tau = (\tau_{max}- \tau _{min} )\tag{9} \label{Delta_sigma}\]
\[ \sigma_m =(\sigma_{max}+\sigma_{min})/2\tag{10}\label{sigma_m}\]
W przypadku elementów niespawanych lub spawanych odprężonych oraz cykli naprężeń całkowicie lub częściowo ściskających norma [1] zezwala na wyznaczenie zredukowanego zakresu zmienności naprężeń normalnych, uwzględniających tylko 60% zakresu zmienności naprężeń ściskających $\sigma_c$ i 100% naprężeń rozciągających $\sigma_t$
\[ \Delta \sigma = 0,6 \cdot \lvert \sigma_c \rvert + \vert \sigma _t \rvert \tag{11}\label{Delta_spaw}\]
W przypadku widma o nieregularnej zmienności naprężeń (tzw widma niejednorodnego) norma zaleca zastosowanie jednej z technik zliczania cykli w celu zamiany takiego widma na równoważny mu zbiór widm jednorodnych(rys. 3).
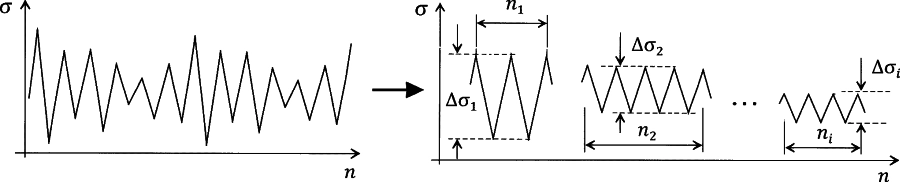
Rys. 3 Transformacja widma niejednorodnego na równoważne jednorodne [13]
Metoda zbiornikowa zliczania cykli
Najbardziej rozpowszechnioną metodą zliczania cykli jest metoda „zbiornikowa”.
W metodzie zbiornikowej do zliczania cykli obciążeń bierze się reprezentatywny, powtarzalny przedział zmienności oszacowanej (lub pomierzonej) historii naprężenia. Przyjęty do analizy przedział musi powtarzać się w dłuższym okresie, a wyznacza się go między największymi wartościami naprężeń. Wykres zmienności naprężeń w takim przedziale traktuje się jak ściany zbiornika wypełnionego wodą. Procedura zliczania cykli polega na znajdowaniu najniżej położonego punktu wykresu i wyobrażeniu sobie, że otwiera się tam korek i spuszcza wodę (rys.4).
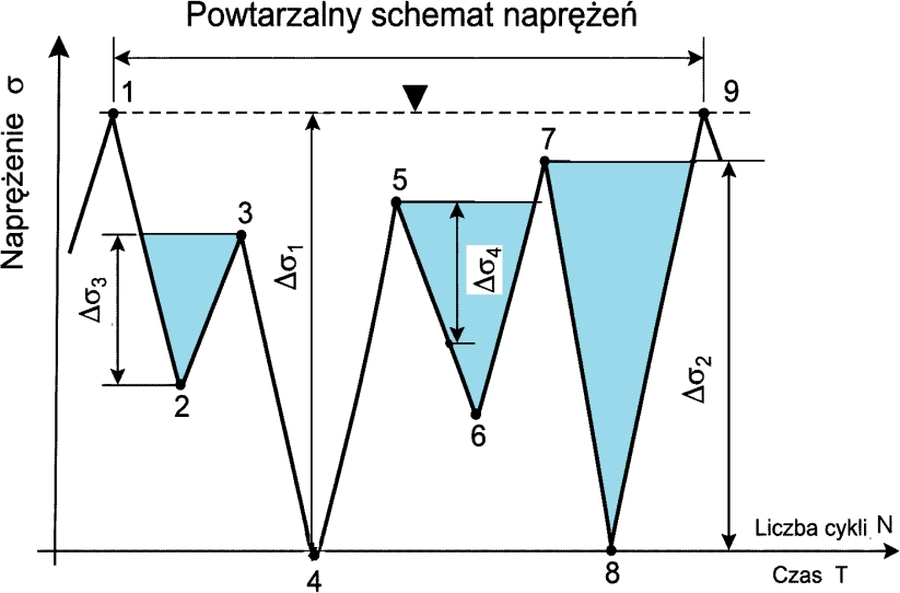
Rys.4. Zliczanie cykli metodą zbiornikową [13]
Spuszczenie wody z najniższego punktu (pkt 4 na rys wyżej) odpowiada zliczeniu jednego pełnego cyklu obciążenia o zakresie $\Delta \sigma_i$. W podobny sposób w kolejnych krokach „opróżnia się” wodę z pozostałych fragmentów zbiornika, w których jeszcze pozostała, znajdując za każdym razem najniżej położony punkt wykresu. Pozwala to na zliczenie kolejnych zakresów zmienności obciążenia $\Delta \sigma_i$, liczonych jako różnica pomiędzy obecnym poziomem spuszczanej wody, a poziomem „otwieranego” korka. Liczba cykli obciążeń n , odpowiadająca danemu zakresowi zmienności $\Delta \sigma_i$, jest liczbą „wyciągnięć korka”. Procedurę tę powtarza się, aż do całkowitego „opróżnienia” zbiornika. Najważniejszą zasadą opisanej procedury jest opróżnianie i zliczanie w pierwszej kolejności zbiorników, w których występuje największa wysokość słupa wody, czyli największy zakres naprężeń. Wyznaczając całkowitą liczbę cykli obciążeń odpowiadającą rozpatrywanemu zakresowi naprężeń $\Delta \sigma_i$,, trzeba również uwzględnić ile razy analizowany schemat obciążenia powtarza się podczas eksploatacji konstrukcji.
Przykład zliczania cykli metodą zbiornikową
Mamy zarejestrowaną (lub wyznaczoną analitycznie) historię naprężenia w elemencie pokazan na rys.5. Pokazana sekwencja jest powtórzona $1,1 \cdot 10^5$ razy w całym okresie użytkowania obiektu.
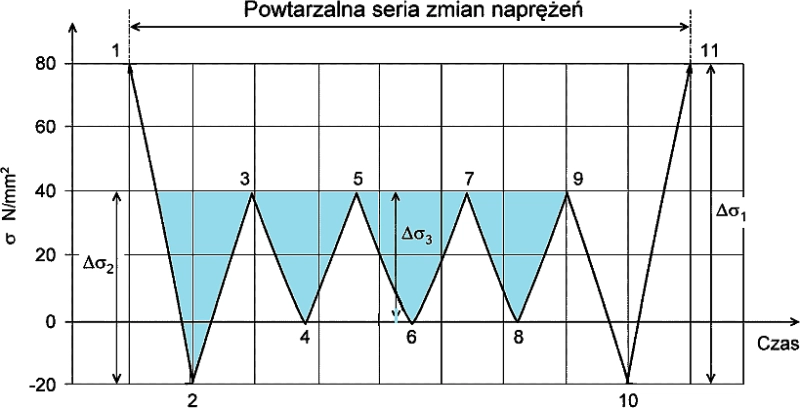
Rys.5. Przykładowe niejednorodne widmo naprężeń do metody zbiornikowej [13]
Liczbami nieparzystymi ponumerowano lokalne ekstrema, natomiast parzystymi lokalne minima. Kolejne etapy otwierania „korków”pokazano na rys. 5 :
otwarcie korka w pkt. 10, następnie w pkt 2, 4 , 6 i 8 o anstęujących zakresach zmiennosći naprężeń:
otwarcie korka w pkt 10: $\Delta \sigma_1 =80 -(-20)= 100 N/mm^2$,
otwarcie korka w pkt 2: $\Delta \sigma_2=40 -(-20) = 60 N/mm^2$ ,
otwarcie korka w pkt 4: $\Delta \sigma_3=40- 0= 40 N/mm^2$ ,
otwarcie korka w pkt 8: $\Delta \sigma_3=40- 0= 40 N/mm^2$ ,
otwarcie korka w pkt 6: $\Delta \sigma_3=40- 0= 40 N/mm^2$ ,
Zliczenie cykli :
$\Delta \sigma_1=100 N/mm^2$ – 1 cykl ,
$\Delta \sigma_2=60 N/mm^2$ – 1 cykl.
$\Delta \sigma_3=40 N/mm^2$ – 3 cykle
Liczba cykli w całej historii obciążenia:
$\Delta {\sigma_1}=100 n/mm^2$ ; $n_{E1}= 1,10 \cdot 10^5 $ ;
$\Delta {\sigma_2}=60 N/mm^2$ $n_{E2}= 1,10 \cdot 10^5$;
$\Delta {\sigma_3}=40 N/mm^2$ $n_{E3}= 3,30 \cdot 10^5$.
Metoda naprężeń nominalnych (MNN) i geometrycznych (MNG)
Metoda naprężeń geometrycznych (MNG) wymaga wyznaczenia zakresu zmienności naprężeń geometrycznych, czyli największych naprężeń w materiale rodzimym, w sąsiedztwie początku spoiny, uwzględniających lokalny wpływ karbu konstrukcyjnego (całkowitej geometrii konstrukcji), lecz pomijających lokalny wpływ spiętrzenia spowodowany geometrią spoiny i jej nieciągłościami. Tak wyznaczony zakres zmienności naprężeń geometrycznych porównuje się z odpowiednią dla tej metody wytrzymałością zmęczeniową, inną niż w przypadku metody naprężeń nominalnych. MNG jest metodą nowoczesną i dokładniejszą, ale wymaga prowadzenia obliczeń MES, co jest praktycznie technicznie uzasadnione tylko w przypadku elementów maszyn i wyodrębnionych elementów konstrukcji, a staje się zbyt pracochłonne i kosztowne dla systemów konstrukcji budowlanych.
Metoda naprężeń nominalnych (MNN) jest często nazywana metodą klasyfikacyjną. Zakres zmienności naprężeń normalnych $\Delta_{\sigma}$ lub stycznych $\Delta \sigma $ od zmieniających się obciążeń wyznacza się dla naprężeń nominalnych, tzn przy obliczeniowym pominięciu występującego spiętrzenia naprężeń. Wartość tak wyznaczonego zakresu zmienności naprężeń porównuje się z wytrzymałością zmęczeniowa, określoną dla danego typu karbu, występującego w miejscu wyznaczenia naprężeń. Taka wytrzymałość zmęczeniowa ujmuje w sobie wielkość spiętrzenia, rozrzut wyników badań zmęczeniowych, wpływ naprężeń własnych itp.
W metodzie MNN olbrzymią różnorodność karbów występujących w konstrukcjach i różniących się od siebie stopniem spiętrzenia naprężeń (mimo ich geometrycznego podobieństwa) sprowadzono do tylko 14 typów dla zakresów zmienności naprężeń normalnych i do 2 typów dla zakresów zmienności naprężeń stycznych. Uproszczenie spowodowało, że w wielu przypadkach obliczeniowa wytrzymałość na zmęczenie określana jest dla ostrzejszego karbu od faktycznie występującego w konstrukcji. Metoda naprężeń nominalnych (MNN) jest konserwatywna, tradycyjna i może prowadzić do znacznych niedokładności , choć jest prosta i stosowana w EC3 [1]. W niniejszym artykule zajmujemy się tylko metodą MNN.
Wyznaczanie naprężeń w karbie w metodzie MNN
W metodzie MNN zakres zmienności naprężeń wyznacza się według formuł klasycznej wytrzymałości materiałów, które dla rozciąganego i zginanego poprzecznie pręta pryzmatycznego mają postać:
\[ \sigma =\dfrac{N}A{}+\dfrac{M_y}{I_z} \cdot z +\dfrac{M_z}{I_y} \cdot y \tag{12}\label{sigma}\]
\[ \tau =\dfrac{V \cdot S}{I \cdot t}\tag{13}\label{tau}\]
gdzie siły przekrojowe wyznacza się dla obciążeń częstych oddziaływania zmiennego o wartości charakterystycznej $\psi_1 \cdot Q_k$
W przypadku elementów belkowych uogólnionych (Własowa) należy dodać człony od bimomentu oraz od skręcania swobodnego i nieswobodnego.
Naprężeniami miarodajnym do wyznaczenia zmienności naprężeń w spoinach są naprężenia normalne
\[ \sigma_{wf}=\sqrt{ {\sigma_{\perp f}}^2+ {\tau_{\perp f}}^2}\tag{14}\label{sigma_wf} \]
lub naprężenia ścinające $\tau_{wf}$ wzdłuż osi spoiny
\[ \tau_{wf}=\tau_{||f}\tag{15} \label{tu_wf}\]
Wytrzymałość zmęczeniowa
Krzywa zmęczeniowa
Aby określić wytrzymałość zmęczeniowa przy innej liczbie cykli naprężeń, norma [1] podaje zależność między zmiennością naprężeń, a liczbą cykli do zniszczenia w postaci zbioru krzywych, osobnych dla naprężeń normalnych ($log \Delta \sigma_R -log N$) i dla naprężeń stycznych ($log \Delta \tau_R -log N$). Takie krzywe często są określane mianem krzywych S-N. Przykładowy kształt jednej z krzywych dla naprężeń normalnych pokazano na rys. 6 a dla naprężeń stycznych na rys.7.
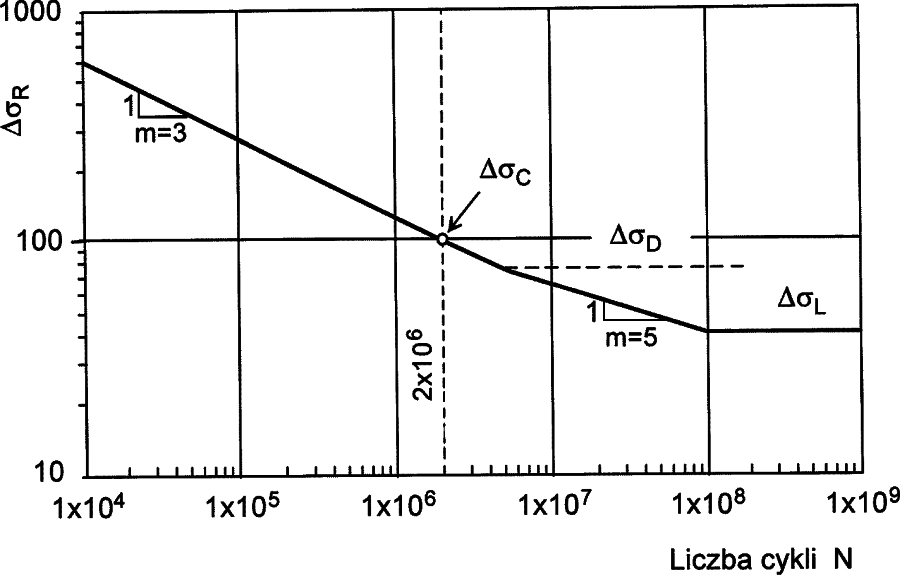
Rys.6 Krzywa zmęczeniowa dla naprężeń normalnych [1]
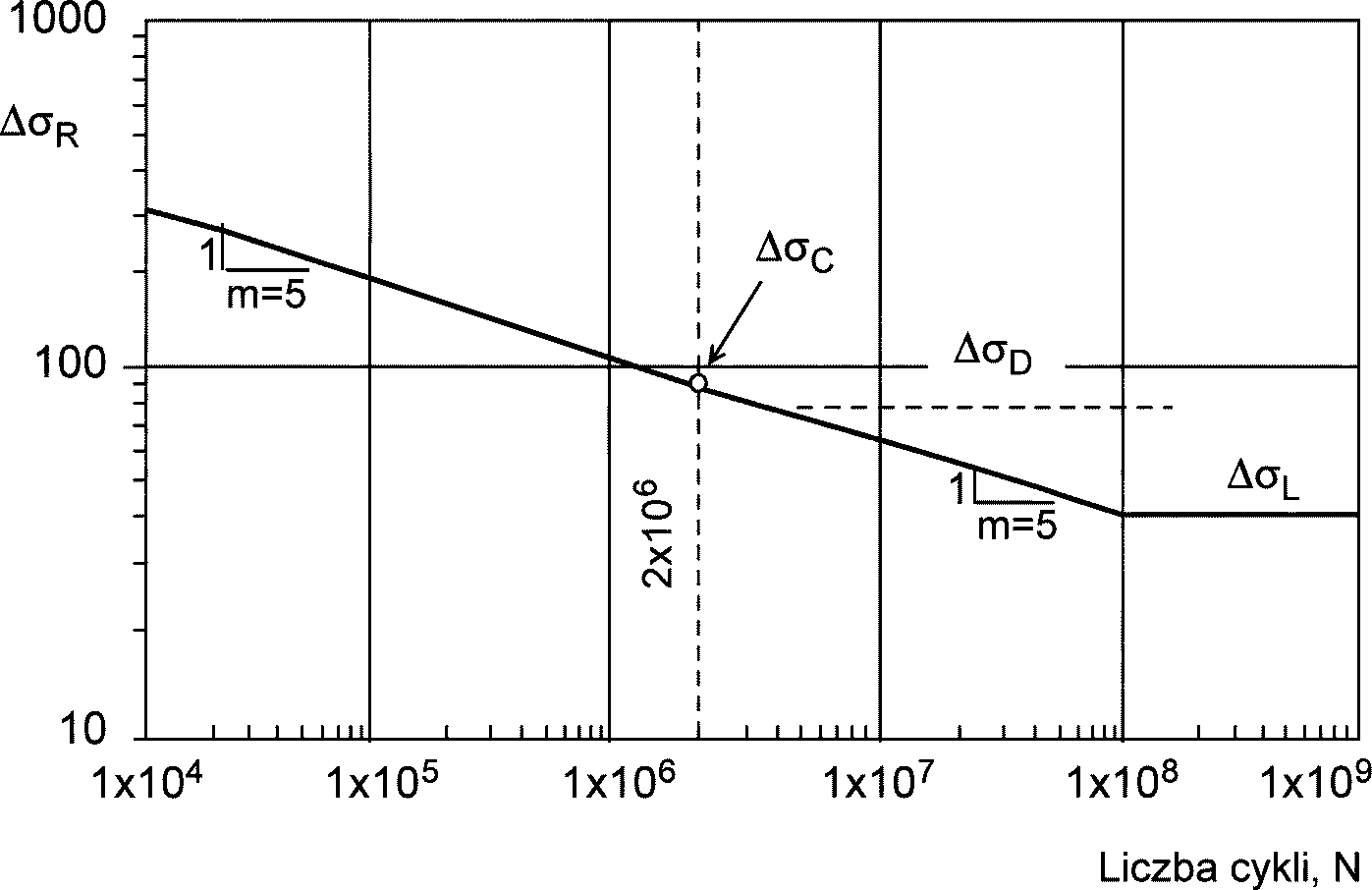
Rys 7 Krzywa zmęczeniowa dla naprężeń stycznych [1]Charakterystycznymi punktami krzywej zmęczeniowej są:
Wytrzymałość zmęczeniowa normatywna $\Delta \sigma_c$ , $\Delta \tau_c$ jest podstawowym parametrem, opisującym karb w metodzie MNN. Jest to zakres zmienności naprężeń o stałej amplitudzie, odpowiadający zniszczeniu przy liczbie cykli $N=2 \cdot 10^6$. Ten zakres naprężeń wyrażony w N/mm2 jest nazywany również kategorią zmęczeniową
Wytrzymałość zmęczeniowa graniczna $\Delta \sigma_d$ jest wartością zakresu naprężeń normalnych przy stałej amplitudzie, dla której następuje załamanie krzywej zmęczeniowej
Wytrzymałość zmęczeniowa trwała $\Delta \sigma_L$ iest graniczną wartością zakresu naprężeń normalnych przy stałej amplitudzie, poniżej której w badaniach nie występuje nachylenie krzywej zmęczeniowej
Nachylenie krzywej zmęczeniowej dla naprężeń normalnych ($ log \Delta \sigma – log N$ ) (rys. 6), przyjmuje wartości:
- dla liczby cykli do $N \le 5 \cdot 10^6 wynosi 1:3 ;
- dla liczby cykli $ 5 \cdot 10^6 < N < 10^8 wynosi 1:5.
W przypadku krzywej zmęczeniowej dla ścinania ($log \Delta \tau-log N$) (rys.7) nachylenie odcinka prostej jest stałe w zakresie $1 \cdot 10^4 < N < 10^8$ i wynosi 1:5
Wytrzymałość zmęczeniowa
Wytrzymałość zmęczeniowa odnosząca się do naprężeń normalnych o stałej amplitudzie jest funkcją liczby cykli naprężeń, wyrażoną jako
\[ \Delta\sigma_R^m \cdot N_R=\Delta\sigma_c^m \cdot 2 \cdot 10^6 \text { gdy } 1 \cdot 10^4 \le N \le 5 \cdot 10^6 \tag{16}\label{sigma_R} \]
przy czym $m=3$ , oraz
\[ \Delta\sigma_D=(2/5)^{1/3} \cdot \Delta \sigma_c =0,737 \cdot \Delta \sigma_c \text { gdy } N>5 \cdot 10^6 \tag{17} \label{sigma_D}\]
W wypadku widm naprężeń niejednorodnych (o zmiennej amplitudzie) krzywa trwałości zmęczeniowej, odnosząca się do naprężeń normalnych , opisywana jest następującymi zależnościami:
\[ \text { 1) dla } 1 \cdot 10^4 \le N \le 5 \cdot 10^6 \text { jest : } \Delta\sigma_R^m \cdot N_R=\Delta\sigma_c^m \cdot 2 \cdot 10^6 \text { oraz } N=3 \tag{18a} \label{sigma_D1}\]
\[ \text { 2) dla } 5 \cdot 10^6 < N \le 10^8 \text { jest : } \Delta\sigma_R^m \cdot N_R=\Delta\sigma_D^m \cdot 2 \cdot 10^6 \text { oraz } N=5 \tag{18b}\label{sigma_D2}\]
\[ \text { 3) dla } N > 10^8 \text { jest : } \Delta \sigma_L =\Delta \sigma_D \cdot (5/100)^{1/7}=0,549 \Delta \sigma_D=0,549 \cdot 0,737 \Delta \sigma _c=0,405 \Delta \sigma_c \tag{18c}\label{sigma_D3}\]
Krzywe wytrzymałości zmęczeniowej, odnoszące się do naprężeń stycznych opisywane są podobnymi zależnościami z drobnymi zmianami wg [1].
Poziomy kontroli konstrukcji a współczynnik bezpieczeństwa $\gamma_{Mf}$
Wartość współczynnika bezpieczeństwa $\gamma_{Mf }$ zależy od poziomu kontroli konstrukcji w trakcie eksploatacji konstrukcji poddawanej zmęczeniu. oraz od konsekwencji zniszczenia. W przypadku braku wystarczających danych zaleca się przyjmować te współczynniki zgodnie z tab 2 , obowiązującą dla belek podsuwnicowych
Tab_2″> Tab. 2 Wartości współczynnika bezpieczeństwa $\gamma_{Mf }$ [14] – tab.3.1.
\[ \begin{array}{|c|c|c|}
\hline \text{Metoda oceny} & \text{Małe konsekwencje} & \text{Duże konsekwencje} \\
\hline \begin{array}{c} \text{Metoda tolerowanych} \\ \text{uszkodzeń} \end{array} & 1,00 & 1,15 \\
\hline \begin{array}{c} \text{Metoda bezwarunkowej} \\ \text{żywotności} \end{array} & 1,15 & 1,35 \\
\hline \end{array}\]
Przy ustalaniu konsekwencji zniszczenia należy brać pod uwagę schemat konstrukcji. W przypadku schematów statycznie wyznaczalnych (belka swobodnie podparta lub zwykła kratownica) konsekwencje zniszczenia są zwykle duże, bo lokalne pęknięcia mogą doprowadzić do zniszczenia całej konstrukcji (system szeregowy z punktu widzenia niezawodności). W takim systemie nie dochodzi do redystrybucji naprężeń, po lokalnym pęknięciu, a następuje pogłębianie się pęknięcia [14]-pkt 3.3.
Klasa konsekwencji zależy od przeznaczenia obiektu oraz projektowanego okresu eksploatacji.
Konsekwencje zniszczenia mogą być mniejsze (małe) w przypadku konstrukcji mniej ważnych, takich, których katastrofa prowadziłaby do małych strat materialnych i nie powadziłaby do strat ludzkich. Na przykład zniszczenie wolnopodpartej belki podsuwnicowej zwykle prowadzi do dużych konsekwencji zniszczenia, a zniszczenie tężnika przeciwhamownego do małych konsekwencji.
Metoda bezwarunkowej żywotności (MBŻ) będzie stosowana w sytuacji, gdy nie przewiduje się systematycznej kontroli konstrukcji podczas eksploatacji. Zakłada się mianowicie, że odpowiednią niezawodność konstrukcji można osiągnąć bez konieczności regularnych kontroli na okoliczność uszkodzeń zmęczeniowych w okresie eksploatacji
Metoda tolerowanych uszkodzeń (MTU) prowadzi do konieczności ciągłych, systematycznych obserwacji i kontroli stanu krytycznych miejsc konstrukcji.
Metodę oceny zapewnienia akceptowalnego poziomu niezawodności oraz klasę konsekwencji należy jawnie określić w specyfikacji technicznej wykonania i odbioru konstrukcji podatnych na zmęczenie . W większości przypadków przyjmuje się metodę bezwarunkowej żywotności (MBŻ) i wówczas:
$\gamma_{Mf}=1,15$ dla konstrukcji o małych konsekwencjach zniszczenia,
$\gamma_{Mf}=1,35$ dla konstrukcji o dużych konsekwencjach zniszczenia.
Współczynnik γFf
Współczynnik $\gamma_{Ff}$ jest współczynnikiem równoważnego zakresu zmienności naprężeń o stałej amplitudzie.
Jeśli nie ma specyficznych wymagań, to dla typowych konstrukcji, w tym dla belek podsuwnicowych przyjmuje się
γFf =1,0.
Równoważne zakres naprężeń $\Delta\sigma_{E2}$
Zakres zmienności naprężeń $\Delta \sigma$ w danym punkcie $P$ konstrukcji, uzyskaną standardowymi metodami statyki, oznaczmy przez $\Delta \sigma_P$.
Ze względu na rozmaite widma obciążeń rzeczywistą amplitudę naprężeń należy sprowadzić do amplitudy, wywołanej wymuszeniami o stałym zakresie zmian,odniesionej do $2 \cdot 10^6$ cykli. Taki zakres naprężeń nazywa się równoważnym, oznacza $\Delta \sigma_{E2}$ i wyznacza z ogólnej zależności
\[ \gamma_{Ff} \Delta \sigma_{E2}=\lambda_1 \lambda_2 \lambda_i \text{…} \lambda_n \Delta \sigma (\gamma_{Fj} Q_k) \tag{18} \label{sigma_E2} \]
Występujące w ($\ref{SE2}$) zmienne $\lambda_i$ są zastępczymi czynnikami uszkodzeń, zależnymi od widma obciążeń, określanymi odrębnie dla każdego i-tego obciążenia i są specyfikowane w normach dotyczącymi różnych konstrukcji (mosty, kominy, wieże, belki podsuwnicowe).
Dla wielu prostych konstrukcji, na które działa jednorodne widmo obciążenia, iloczyn $\lambda_1 \lambda_2$ … można zastąpić jednym współczynnikiem równoważności $\lambda$, szacowanym z zależności
\[ \lambda={\dfrac{N}{2 \cdot 10^6}}^{1/m} \tag{19} \label{lambda} \]
gdzie m jest współczynnikiem nachylenia krzywek zmęczeniowej.
Wyrażenie ($\ref{SE2}$) można uzyskać z zależności [15]-(2.16), dotyczącej wymuszeń zmęczeniowych, przy założeniu, że :
1) naprężenia są proporcjonalne do obciążeń z mnożnikiem Λ,
2) naprężenia maksymalne i minimalne są proporcjonalne do tego samego mnożnika Λ, skąd wynika, że również zakres naprężeń jest proporcjonalna do tego samego mnożnika
Mimo to, że nie zawsze założenia proporcjonalności są spełnione, to powszechnie zakres równoważny wyznacza się z zakresu $\Delta \sigma_P$ wywołanej quasistatycznymi (po zastosowaniu współczynników dynamicznych) wymuszeniami charakterystycznymi z zależności:
\[ \Delta \sigma_{E2}= \lambda \cdot \Delta \sigma_P \tag{20} \label{D_sigmaE2} \]
\[ \Delta \tau_{E2}= \lambda \cdot \Delta \tau_P \tag{21} \label{D_tauE2} \]
Współczynnik równoważności widma obciążeń $\lambda$, występujący w ($ \ref{D_sigmaE2}$ )wyznacza się w zależności od rodzaju konstrukcji (belki podsuwnicowe, wieże , maszty, mosty , itd). Na przykład w przypadku wymuszenia suwnicami można go przyjąć na podstawie klasy S w sposób pokazany niżej.
Karby, to typy kategorii zmęczeniowych FAT
Znaczną różnorodność karbów, występujących w konstrukcjach zredukowano do kilkunastu kategorii. Kategoria zmęczeniowa FAT jest liczbową wartością normatywnej wytrzymałości zmęczeniowej odpowiadającą liczbie cykli
przypisaną określonemu detalowi konstrukcyjnemu (karbowi) oraz kierunkowi działania naprężeń.
Kategorie zmęczeniowe $\Delta\sigma_c$ i $\Delta\tau_c$, charakteryzujące poszczególne krzywe zmęczeniowe podzielone są na następujące typy:
- elementy bez spoin i złącza na łączniki mechaniczne
- kształtowniki spawane
- spoiny czołowe poprzeczne
- dospawane blachy węzłowe i żebra
- złącza spawane i nośne
- kształtowniki zamknięte
- złącza w węzłach kratownic z kształtowników zamkniętych
- podłużnice o przekroju zamkniętym w pomostach ortotropowych
- styki górne pasów ze środnikiem w belkach podsuwnicowych
W tab. 3 zestawiono dla przykładu kategorie zmęczeniowe styków górnych pasów ze środnikiem w belkach podsuwnicowych.
Tab. 3 Kategorie zmęczeniowe styków pasów ze środnikiem belek podsuwnicowych [1]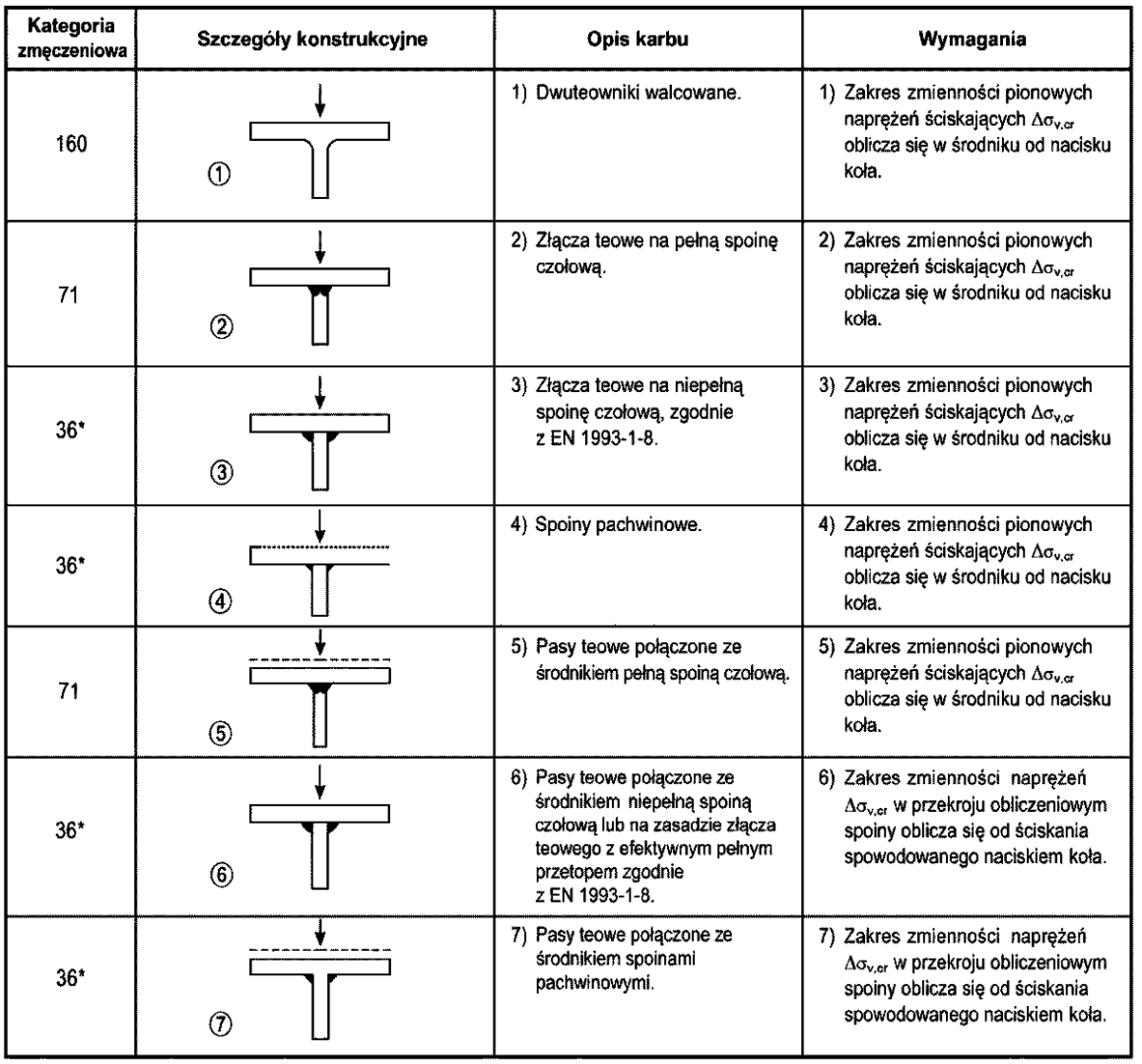

Warunki nośności zmęczeniowej
Sprawdzenie nośności zmęczeniowej polega na sprawdzeniu dwóch warunków:
- zakresu zmienności naprężeń wywołanych obciążeniami częstymi $\gamma_1 Q_k$ (warunek ograniczenia lokalnych uplastycznień (odpowiadający wyeliminowaniu zmęczenia niskocyklowego)
- nośności na zmęczenie (wysokocyklowe)
Warunek zakresu zmienności naprężeń ogranicza możliwość występowania lokalnych uplastycznień i tym samym umożliwia stosowanie metod wysokocyklowych HCF i można go zapisać w postaci:
\[ \Delta \sigma < 1,5 \cdot f_y \text { oraz } \Delta \tau < 1,5 \cdot \dfrac {f_y}{\sqrt {3}} \tag{22} \label {LCF_general} \]
W kombinacji obciążeń $\psi_1 Q_k$ występują charakterystyczne wartości obciążeń zmiennych $Q_k$, a $\psi_1$ jest współczynnikiem wartości częstej oddziaływania zmiennego . Dla oddziaływań suwnic przyjmuje się $\psi_1$=0,9$
Warunek nośności na zmęczenie polega na sprawdzeniu zakresu zminności naprężeń:
a) normalnych
\[ \cfrac{\gamma_{Ff} \cdot \Delta \sigma_{E,2}} {\Delta \sigma_c / \gamma_{Mf}} \le 1,0 \tag{23} \label{FAT_s}\]
b)stycznych
\[ \cfrac{\gamma_{Ff} \cdot \Delta \tau_{E,2}} {\Delta \tau_c / \gamma_{Mf}} \le 1,0 \tag{24} \label{FAT_t} \]
Zmęczenie w warunkach złożonego stanu naprężeń
Reguła Palmgrena-Minera sumowania uszkodzeń zmęczeniowych
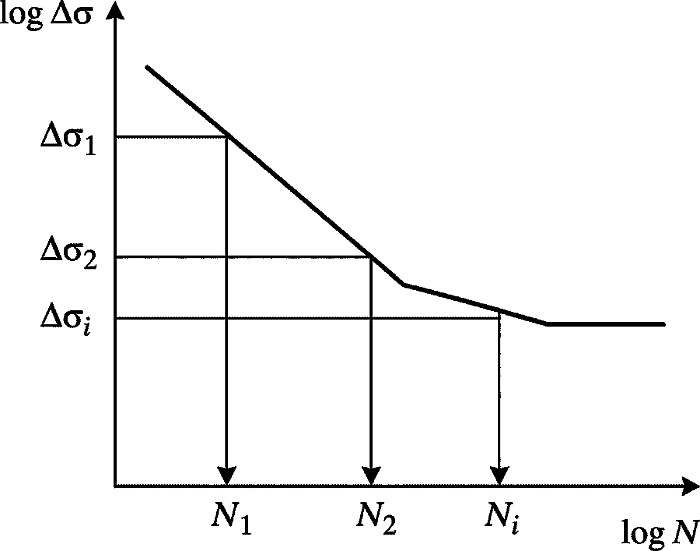
Jeśli widmo naprężenia nie jest jednorodne i jedna z metod zliczania cykli charakteryzuje go w postaci zbioru kilku widm jednorodnych { $n_{Ei}$ , $ \sigma_{Ei}$ }, to ocena zmęczenia polega na wyznaczeniu sumarycznego wskaźnika uszkodzenia $D_d$ na podstawie reguły Palmgrena-Minera sumowania uszkodzeń zmęczeniowych:
\[ D_d= \sum \limits_i^n \dfrac{n_{Ei} }{N_{Ri}} \]
gdzie: $n_{Ei}$ – liczba cykli związana z zakresem zmienności w i-tym paśmie widma, $N_{Ri}$ – trwałość uzyskana na podstawie krzywej obliczeniowej $\dfrac{\Delta \sigma_c}{\gamma_{Mf}}-N_R$ dla zakresu zmienności widma, co pokazano schematycznie na rys 8:
Warunek nośności zmęczeniowej w przypadku stosowania formuły Palmgrena-Minera można zapisać w postaci:
\[ D_d<1,0 \tag{25} \label {D_d} \]
Warunek zmęczenia w złożonym stanie naprężeń
Naprężeniami miarodajnymi do wyznaczenia zmienności naprężeń są naprężenia normalne i styczne. W niektórych przypadkach (karby typu: elementy bez spoin i złącza na łączniki mechaniczne oraz typu kształtowniki spawane) należy wyznaczać również naprężenia zastępcze lub główne.
W przypadku naprężeń złożonych, jeśli nie podano inaczej, to należy sprawdzić warunek:
\[ \left( \dfrac{ \gamma_{Ff} \Delta \sigma_{E,2}} {\Delta \sigma_c / \gamma_{Mf}} \right)^3 +\left( \dfrac{ \gamma_{Ff} \Delta \tau_{E,2}} {\Delta \tau_c / \gamma_{Mf}} \right)^5 \le 1,0 \tag{26} \label{FAT_złożony}\]
Zmęczenie (wysokocyklowe) dla belki podsuwnicowej (podtorza suwnic)
Uproszczenia złożonego problemu zmęczenia stali wprowadzono do konstrukcyjnych norm budowlanych. Szczególnie użyteczne i praktyczne procedury obliczeniowe dla belek podsuwnicowych przedstawiono w normie [16], która określa zasady obliczania belek, ich stateczności oraz nośności zmęczenia. – patrz Oddziaływania statyczne i dynamiczne suwnic.
Dla warunków obliczeniowych przedstawionych w normie [16] zarówno przy jednej jak dwóch suwnicach muszą być spełnione założenia:
– co najwyżej przeciętne zagrożenie korozją,
– temperatura eksploatacji nie wyższa niż 150°C,
– zmiany zakresu naprężeń normalnych i stycznych nie prowadzą do zmęczenia niskocyklowego ($\refl{LCF_tau}$)
Współczynnik równoważności $\lambda$
W przypadku wymuszenia dynamicznego suwnicami współczynnik równoważności $\lambda$ można przyjąć na podstawie klasy S suwnicy zgodnie z tab .4.
Tab_4″> Tab.4. Wartości λ według klas suwnic [15]-tab. 2.12}]
\[ \begin{array}{|l|c|c|c|c|c|c|c|c|c|c|}
\hline \textbf{Klasy S} & S_0 & S_1 & S_2 & S_3 & S_4 & S_5 & S_6 & S_7 & S_8 & S_9 \\
\hline \begin{array}{l} \text{Naprężenia} \\ \text{normalne} \end{array} & 0,198 & 0,250 & 0,315 & 0,397 & 0,500 & 0,630 & 0,794 & 1,00 & 1,260 & 1,587 \\
\hline \begin{array}{l} \text{Naprężenia} \\ \text{styczne} \end{array} & 0,379 & 0,436 & 0,500 & 0,575 & 0,660 & 0,758 & 0,871 & 1,00 & 1,149 & 1,320 \\
\hline \end{array}\]
Uwagi:
(1) Do wyznaczenia wartości λ wykorzystano standaryzowane widmo obciążeń o rozkładzie Gaussa, regułę Palmgrena-Minera oraz krzywe S-N o nachyleniu m=3 dla naprężeń normalnych i m=5 dla naprężeń stycznych.
(2) W przypadkach, gdy w dokumentacji suwnicy klasa suwnicy nie jest podana, można korzystać z Załącznika B do normy
(3 ) Klasę suwnicy podaje producent, a w przypadku braku danych wg [15]-Zał. B, który stanowi tab. 3 w artykule. Oddziaływania dynamiczne i zmęczeniowe suwnic. W artykule tym omówiono również zasady przyjmowania obciążeń na suwnice.
Wartość λ rośnie wraz ze wzrostem klasy natężenia eksploatacji suwnicy, co odzwierciedla wzrost liczby cykli obciążenia i skumulowanych uszkodzeń zmęczeniowych.
Kategoria zmęczeniowa miejsc na belce
Kategoria zmęczeniowa , dotyczy nie całej belki, ale miejsc (punktów) na belce, w których ulokowano karby konstrukcyjne najczęściej wskutek wykonania otworów na śruby lub po ułożeniu spoin , albo wskutek innych operacji technologicznych (walcowanie, cięcie itd).
Rodzaj karbu konstrukcyjnego determinuje kategorię zmęczeniową FAT, opisywaną parametrami $\Delta \sigma_c$ oraz $\Delta \tau_c$
Kategorię zmęczeniową określa się z tabel normy [1] , wyciąg z których zamieszczono powyżej.
W zależności od liczby suwnic poruszających się po belce podsuwnicowej występują zróżnicowane warunki obliczeniowe. W przypadku suwnic niezależnych uwzględnia się jedynie dwie suwnice najbardziej niekorzystnie obciążające belkę.
Obciążenie jedną a dwoma suwnicami
Dla belek obciążonych jedną suwnicą lub dwiema sprzężonymi (zespolonymi w celu przeniesienia ciężaru większego niż udźwig jednej z nich) należy sprawdzić warunki
\[ max \Delta \sigma_e \le \left( \dfrac{\Delta \sigma_R}{\gamma_f}\right) \tag{27} \label{maxDeltas} \],
\[ max \Delta \tau_e \le \left( \dfrac{\Delta \tau_R}{\gamma_f}\right) \tag{28} \label{maxDeltat}\],
\[ \left( \dfrac {\Delta \sigma_e} {\Delta \sigma_R} \right) ^3 +\left( \dfrac {\Delta \tau_e} {\Delta \tau_R} \right) ^5 \le 1,0 \tag{29} \label{maxDeltase}\],
gdzie wytrzymałość zmęczeniowa $\Delta \sigma_R$=$\Delta \sigma_c$ oraz $\Delta\tau_R$=$\Delta\tau_c$
Dla belek obciążonych dwiema suwnicami (niezależnymi) trzeba dodatkowo sprawdzić warunek:
\[ \left( \dfrac {\Delta \sigma_{e,1}} {\Delta \sigma_{R,1}} \right) ^3 +\left( \dfrac {\Delta \sigma_{e,2}} {\Delta \sigma_{R,2}} \right) ^3+\left( \dfrac {\Delta \sigma_{e1,2}} {\Delta \tau_{R 1,2}} \right) ^3 \le 1,0 \tag{30}\label{dwie_dodatk}\],
gdzie indeksy 1 i 2 dotyczą odpowiednio pierwszej i drugiej suwnicy.
W przypadku dwóch belek wytrzymałość zmęczeniowa wynosi
\[ \Delta \sigma_R=0,738 \Delta \sigma_c \left (\dfrac{5 \cdot 10^6}{N} \right )^{1/m} \ge \Delta \sigma_L \tag{31}\label{dwie_sR}\]
\[ \Delta \tau_R=\Delta \tau_c \left (\dfrac{2 \cdot 10^6}{N} \right )^{1/m} \ge \Delta \sigma_L \tag{32} \label{dwie_tR} \]
gdzie m=3 , gdy $N \le 5\cdot 10^6$ i m=5 gdy $N>5\cdot 10^6$
$\Delta \sigma_c$ , $\Delta \tau_c$ – kategorie zmęczeniowe, $\Delta \sigma_L$ , $\Delta \tau_L$– wytrzymałość zmęczeniowa trwała, $\Delta \sigma_e$ , $\Delta \tau_e$– równoważny zakres zmienności naprężeń, $\gamma_f$ – częściowy współczynnik bezpieczeństwa przy zmęczeniu materiału (1 do 1,2)
Wytrzymałość zmęczeniowa grubych elementów
Wytrzymałość zmęczeniową elementów o grubościach t > 25 mm redukuje się według wzoru
\[ \Delta \sigma_{R,red}=\Delta \sigma_R \cdot (25/t)^{1/4} \tag{33} \label {Gruby}\]
Korekta dotyczy jedynie określonych kategorii zmęczeniowych wskazanych w normie.
Grupa natężenia pracy suwnicy i belki
W celu ustalenia wpływu zmęczenia na belkę podsuwnicową trzeba określić grupę natężenia pracy suwnicy A1 do A8 lub grupę natężenia pracy belki B1 do B9. Na tej podstawie określa się rodzaj widma obciążenia suwnicy (lub belki).
Grupę natężenia pracy suwnicy określa producent dźwignicy, a w przypadku braku takich danych można ją szacunkowo przyjąć z tab.5
Tab_5″> Tab. 5 Grupy natężenia pracy suwnicy [15]
\[ \begin{array}{|l|l|l|c|c|c|c|}
\hline \text{Lp.} & \text{Przeznaczenie suwnicy} & \text{Określenie pracy} & \begin{array}{c} \text{Grupa} \\ \text{klasyfikacyjna} \\ \text{suwnicy jako} \\ \text{całości}^{N10)} \end{array} & \text{podnoszenie} & \begin{array}{c} \text{jazda} \\ \text{wciągarki} \end{array} & \begin{array}{c} \text{jazda} \\ \text{suwnicy} \end{array} \\
\hline 1 & \text{Suwnice z napędem ręcznym} & & \text{A1} & \text{M1} & \text{M1} & \text{M1} \\
\hline 2 & \text{Suwnice warsztatowe montażowe} & & \text{A1} & \text{M2} & \text{M1} & \text{M2} \\
\hline3a & \text{Suwnice montażowe w elektrowniach} & & \text{A1} & \text{M2} & \text{M1} & \text{M3} \\
3b & \text{Suwnice remontowe} & & \text{A1} & \text{M3} & \text{M1} & \text{M2} \\
\hline 4a & \text{Suwnice warsztatowe} & \text{regularne rzadkie} & \text{A2} & \text{M3} & \text{M2} & \text{M3} \\
4b & \text{Suwnice warsztatowe} & \text{regularne z przerwami} & \text{A3} & \text{M4} & \text{M3} & \text{M4} \\
4c & \text{Suwnice warsztatowe} & \text{intensywne} & \text{A4} & \text{M5} & \text{M3} & \text{M5} \\
\hline 5a & \text{Suwnice hakowe na składowiskach} & \text{regularne rzadkie} & \text{A3} & \text{M3} & \text{M2} & \text{M4} \\
5b & \begin{array}{l} \text{Suwnice chwytakowe lub z chwytakiem} \\ \text{elektromagnetycznym na składowiskach} \end{array} & \text{intensywne} & \text{A6} & \text{M6} & \text{M6} & \text{M6} \\
\hline 6a & \text{Suwnice hakowe na składowiskach} & \text{regularne rzadkie} & \text{A3} & \text{M4} & \text{M3} & \text{M4} \\
6b & \begin{array}{l} \text{Suwnice chwytakowe lub z chwytakiem} \\ \text{elektromagnetycznym na składowiskach złomu} \end{array} & \text{regularne z przerwami} & \text{A6} & \text{M6} & \text{M5} & \text{M6} \\
\hline 7 & \text{Suwnice portowe przeładunkowe} & & \text{A7} & \text{M8} & \text{M6} & \text{M7} \\
\hline 8a & \text{Suwnice kontenerowe} & & \text{A5} & \text{M6} & \text{M6} & \text{M6} \\
8b & \text{Suwnice kontenerowe w portach} & & \text{A5} & \text{M6} & \text{M6} & \text{M4} \\
\hline 9 & \text{Suwnice hutnicze} & & & & & \\
9a & \text{Suwnice do wymiany walców} & & \text{A2} & \text{M4} & \text{M3} & \text{M4} \\
9b & \text{Suwnice lejnicze} & & \text{A7} & \text{M8} & \text{M6} & \text{M7} \\
9c & \text{Suwnice kleszczowe} & & \text{A7} & \text{M8} & \text{M7} & \text{M7} \\
9d & \text{Suwnice wypychowe} & & \text{A8} & \text{M8} & \text{M8} & \text{M8} \\
9e & \text{Suwnice wsadowe} & & \text{A8} & \text{M8} & \text{M8} & \text{M8} \\
\hline 10 & \text{Suwnice odlewnicze} & & \text{A5} & \text{M5} & \text{M4} & \text{M5} \\
\hline \end{array}\]
Przy braku dokładniejszych danych można przyjąć , że grupa natężenia pracy belki jest o jeden wyższa od grupy natężenia pracy suwnicy, np. A4 -> B5 .
Zmęczenie niskocyklowe
Wprowadzenie
Podane wcześniej informacje z zakresu zmęczenia konstrukcji dotyczą głównie zmęczenia wysokocyklowego (duża liczba zmian naprężeń w czasie eksploatacji elementu konstrukcji). Z tego typu zmęczeniem mamy do czynienia wtedy, gdy przekrój elementu jest obciążony urządzeniem wywołującym drgania o dużej częstości.
Zmęczenie niskocyklowe elementów konstrukcji budowlanych (kominów, belek podsuwnicowych, rurociągów lub elementów urządzeń przemysłowych) często jest przyczyną katastrof budowlanych o niezidentyfikowanej genezie. Wynika to ze słabego rozpoznania problemu dla wielkogabarytowych konstrukcji stosownych w budownictwie i dużym wpływie efektu skali na zachowanie się konstrukcji w obszarze plastycznych dyslokacji oraz pękania kruchego w obszarach sprężysto-plastycznych elementu. Umownie przyjmuje się, że ze zmęczeniem niskocyklowym mamy do czynienia przy liczbie cykli obciążeń do 105. Granica pomiędzy HCF i LCF nie jest jednak jednoznaczna; w praktyce inżynierskiej przyjmuje się ją zwykle w przedziale 10⁴–10⁵ cykli.
Powyżej tej liczby mamy do czynienia już ze zmęczeniem wysokocyklowym (lub po prostu zmęczeniu), wystarczająco opisanym w normach projektowania [1].
Suwnice należące do wyższych grup natężenia pracy (A5-A9) mogą powodować obliczeniowe zmęczenie materiału belek podsuwnicowych, przy tym zmiany naprężeń w czasie są powolne (w wybranym włóknie przekroju belki podsuwnicowej), ponieważ jazda suwnicy po belce jest stosunkowo wolna (do 80 m/min), a poza tym drgania ciężaru na haku suwnicy są tłumione masą samej suwnicy. W związku z tym zmęczenie belki podsuwnicowej może zajść juprzy małej liczbie cykli Taki typ zmęczenia jest nazywany niskocyklowym.
Należy jednak zweócić uwagę, że mała liczba cykli sama w sobie nie oznacza jeszcze zmęczenia niskocyklowego. O LCF można mówić dopiero wtedy, gdy zmiany naprężeń prowadzą do lokalnych odkształceń plastycznych materiału.
Praktyczne zasady uwzględniania zmęczenia niskocyklowego belek podsuwnicowych opisano w normie [1] – załącznik A.5. Sprowadzają się one do spełnienia ogólnego warunku ograniczenia lokalnych uplastycznień podanego wcześniej we wzorze ($\ref{LCF_general}$). Dla naprężeń stycznych warunek ten można zapisać również w przybliżonej postaci, wynikajaćej z wygodnego przybliżenia (1,5/3≈0,866≈0,9)
\[ \Delta \sigma < 1,5 \cdot f_y \text { oraz } \Delta \tau < 1,5 \cdot \dfrac {f_y}{\sqrt {3}} \approx 0,9 f_y \tag{34} \label{LCF_tau} \]
Belki zabezpieczone przed zmęczeniem niskocyklowym po długim okresie eksploatacji mogą wejść w obszar zniszczenia wysokocyklowego.
Zmęczenie niskocyklowe ( zniszczenie krucho-ciągliwe obserwowane przy liczbie cykli N < 105), wystąpi podczas cyklicznego powstawania lokalnych, jednostronnych deformacji plastycznych, wskutek kumulowania odkształceń plastycznych w rytm kolejnych pętli histerezy, obserwowanych przy kolejnych cyklach obciążenia.
Projektowanie elementów konstrukcji na zmęczenie niskocyklowe jest złożone również dlatego, że w przypadku takiego stanu granicznego mamy do czynienia ze zniszczeniem o mechanizmie mieszanym plastyczno-kruchym. Występuje współdziałanie i wzajemne wzmacnianie mechanizmu ziszczenia plastycznego na skutek narastania dużych odkształceń pełzania i mechanizmu kruchego na skutek propagacji defektów strukturalnych, powodujących rozluźnienie materiału z powodu powstawania mikropęknięć. Równolegle zachodzenie tych obu zjawisk powoduje, że wytrzymałość zmęczeniowa zależy zarówno od okoliczności , wpływających na kruche pękanie , jak i cech wpływających na zniszczenie pełzające. Jednym z ważniejszych czynników w w elementach budowlanych o dużych rozmiarach jest efekt skali, to znaczy efekt zmniejszania się wytrzymałości elementu wraz ze wzrostem jego rozmiaru. Przy ty w związku z istotnym znaczeniem przestrzennych stanów naprężeń na skłonność do kruchego pękania większe znaczenie ma efekt skali 3D. Krótko mówiąc w zjawisku zmęczenia niskocyklowego występuje nagromadzenie procesów trudnych do analizy nawet w prostych przypadkach, a tutaj są one wzajemnie sprzężone i uwikłane. Dlaego skuteczne inżynierskie metody analiz wynika przede wszystkim z szerokich badań ekserymentalnych i powinno być uproszczone tak dalece, jak tylko jest to możliwe.
Propozycja praktycznej quasistatycznej metody obliczeniowej zmęczenia niskocyklowego
Jedną z metod uproszczenia problemu jest podejście integralne, zwane podejściem quasistatycznym [17], w którym zakłada się, że zniszczenie niskocyklowe wystąpi wówczas, gdy skumulowana wielkość odkształceń plastycznych osiągnie wartość równą granicznym deformacjom prowadzącym do zniszczenia przy jednokrotnym obciążeniu statycznym. Zgodnie z fundamentalną hipotezą wytężeniową za miarę wytężenia w złożonym stanie przyjmuje się naprężenie, zredukowane, przy czym najczęściej stosujemy hipotezę energetyczną, gdzie naprężeniem zastępczym jest intensywność naprężeń (Misesa- Hubera).
Proponujemy dla uproszczenia analiz, by współczynnik efektu skali zmniejszający wytrzymałość przyjmować jako zwiększający zakres zmienności obciążenia sprowadzonego. Współczynnik ten można przyjmować w sposób standardowy w zależności od stosunku rozmiaru próbki laboratoryjnej S0 do rozmiaru rzeczywistego elementu konstrukcyjnego ns=S0/S. Przy tym za S należy wybrać rozmiar stosowny do dominującego rodzaju wytężenia elementu, z zachowaniem zasad analizy wymiarowej. W przypadku pręta rozciąganego (cięgna) współczynnik skali będzie iloczynem kwadratu pola przekroju poprzecznego i długości elementu . W przypadku braku innych danych można przyjmować dane jak dla rozciągania osiowego.
Wyznaczone w takim podejściu niszczący zakres zmienności odkształceń ΔεR, zakres zmiennościnaprężeń ΔσR= Et ⋅ΔεR (Et – moduł Younga materiału w temperaturze t oC) i liczba cykli obciążenia NR, nazywamy sprowadzonymi i oznaczamy gwiazdką w górnym indeksie: Δε*R , Δσ*R , N*R. Przyjmuje się, że zniszczenie nastąpi przy pojawieniu się pierwszych pęknięć elementu.
Niszczący (graniczny) zakres zmienności $\Delta \sigma_R^*$ naprężeń niskocyklowych sprowadzonych do naprężeń quasistatycznych, przy danej liczbie cykli obciążenia N, można wyznaczyć z formuły [18]:
\[ \Delta \sigma_R^*= \cfrac{E^t \cdot ln \tfrac{1}{1-A^t/100}}{(4N)^{m_P}+\tfrac{1+r^*}{1- r^*}}+ \cfrac {R_m^t}{(4N)^{m_e}+ \tfrac{1+r}{1- r}} \tag{35} \label{DR} \]
gdzie Et [MPa], At [%] , Rmt [MPa]- współczynniki sprężystości i przewężenie oraz granica wytrzymałość materiału w temperaturze t. Wykładniki potęg mp i me są stałymi materiałowymi i wynoszą:
$m_p=0,5$ dla stali węglowych o wytrzymałości $R_m^t$ = 300 do 700 MPa (dotyczy stali konstrukcyjnych S235 , S275 i S355);
$m_p=0,5+0,0002 (R_m^t-700)$ dla $R_m^t$= 700 do 1200 MPa (dotyczy stali wysoko wytrzymałych, np na śruby i innych specjalnych).
$m_e=0,132 log(R_m^t/R_c^t)$ (jeżeli nie ma dokładniejszych danych me=0,132 log(Rmt/Rct),
gdzie $R_m^t$ jest wytrzymałością zmęczeniową przy N=106 cykli w temperaturze t,
$R_c^t \approx (0,55-0,0001R_m^t)$.
Współczynniki asymetrii cyklu r=σmin/σmax .
Dla asymetrii naprężeń stałej przy kolejnych cyklach , sprowadzony współczynnik asymetrii $r^*=r$.
Na rys. 9 pokazano krzywą zmęczeniową, wyznaczoną z formuły (\ref{DR}) stali węglowej, dla której stosunek granicy plastyczności do granicy wytrzymałości (fyt/Rmt) < 0,7, granica wytrzymałości Rmt ≤ 450 MPa i moduł sprężystości $E^t=1,95\cdot 10^5 \, MPa$.
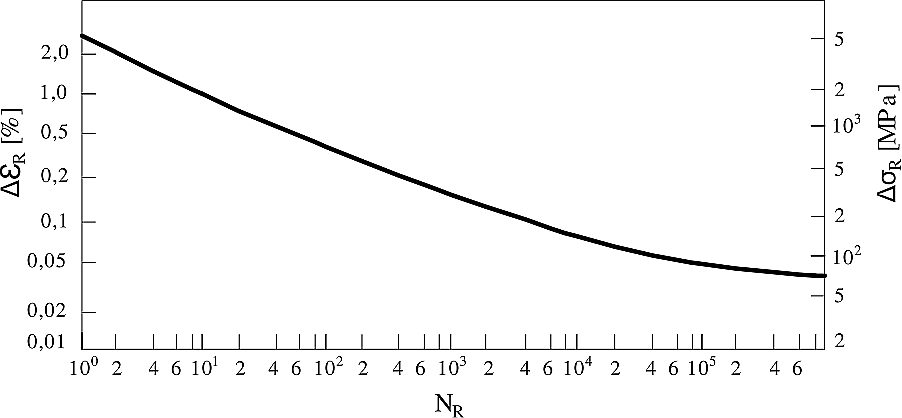
Krzywa jest ważna w przedziale temperatur 20oC do 350oC. Na osi rzędnych naniesiono liczbę cykli obciążenia N, na prawej osi rzędnych – sprowadzony, niszczący zakres zmienności naprężeń $\Delta \sigma^*_R$, a na lewej osi rzędnych sprowadzoną, niszczącą amplitudę odkształceń \Delta $ \varepsilon^*_R=\Delta \sigma^*_R/E^t$.
Dla symetrycznych cykli naprężeń jest $r^*=r=-1$, a dla stali S235 w temperaturze t=20oC, mamy $E^t\approx 200 \,MPa$, $R_m^t\approx 400 \,MPa$, $A^t\approx 30 \%$, $m_p=0,5$, $R_c^t=0,55-0,0001 \cdot 400\approx 200 \, MPa$, $m_e=0,132 \cdot log (400/200)=0,04$.
Przykład sprawdzenia wytrzymałości na zmęczenie niskocyklowe komina stalowego przedstawiono w pracy [18], gdzie liczbę cykli naprężeń badanego komina oszacowano na N=104, a z wyrażenia ($\ref{DR}$) otrzymano $\Delta \sigma^*_R=80 \, MPa$, przy znacznie większej amplitudzie naprężeń wywołanych oddziaływaniem wiatru, w czasie drgań parametrycznych w wirach Bernada-Karmana. Potwierdziło to obserwowane pęknięcia poprzeczne trzonu komina na długości ok. 600 mm, z początkiem w nieobrobionym narożu wylotu do czopucha komina. Nominalna zakres naprężeń została oszacowana na σ=180 MPa< fy, a współczynnik spiętrzenia naprężeń na ασ=4, więc: Δσ= 4·180=720 MPa > Δσ*R.
Literatura
- PN-EN 1993-1-9:2007, Eurokod 3: Projektowanie konstrukcji stalowych, Część 1-9: Zmęczenie
- CAEflow przez Amira Badi (2026) Amir Badi, 2026, [ caeflow.com/fea/high-cycle-fatigue-and-low-cycle-fatigue/]
- Wöhler A. (1867), Versuche zur Ermittlung der auf die Eisenbahnwagenachsen einwirkenden Kräfte und die Widerstandsfähigkeit der Wagenachsen, Berlin: Ernst & Korn
- Wöhler A. (1870), Über die Festigkeits-Versuche mit Eisen und Stahl, Zeitschrift für Bauwesen, 20, Berlin, 73–106
- Basquin O.H. (1910), The Exponential Law of Endurance Tests, Proceedings of the American Society for Testing Materials (ASTM), 10, 625–630
- Manson S.S. (1953), Behavior of Materials under Conditions of Thermal Stress, National Advisory Committee for Aeronautics (NACA), Technical Note TN-2933, Washington D.C.
- Coffin L.F. Jr. (1954), A Study of the Effects of Cyclic Thermal Stresses on a Ductile Metal, Transactions of the ASME, 76, 931–950
- Ramberg W., Osgood W.R. (1943), Description of Stress-Strain Curves by Three Parameters, National Advisory Committee for Aeronautics (NACA), Technical Note No. 902
- Paris P.C., Erdogan F. (1963), A Critical Analysis of Crack Propagation Laws, Journal of Basic Engineering, Transactions of the ASME, Series D, 85, 528–533
- Morrow J.D. (1965), Cyclic Plastic Strain Energy and Fatigue of Metals, Internal Friction, Damping and Cyclic Plasticity, ASTM STP 378, American Society for Testing and Materials, Philadelphia, 45–87
- Smith K.N., Watson P., Topper T.H. (1970), A Stress-Strain Function for the Fatigue of Metals, Journal of Materials, 5(4), 767–778
- CAEflow , Amir Badi, 2026, [ caeflow.com/fea/high-cycle-fatigue-and-low-cycle-fatigue/]
- Kozłowski A. (Red.), (2010), Konstrukcje stalowe. Przykłady obliczeń według PN-EN 1993-1. Część pierwsza. Wybrane elementy i połączenia. Oficyna Wydawnicza Politechniki Rzeszowskiej
- PN-EN 1993-6+Ap1+AC:2009, Eurokod 3 – Projektowanie konstrukcji stalowych – Część 6: Konstrukcje wsporcze dźwignic
- PN-EN 1991-3: 2009, Eurokod 1: Oddziaływania na konstrukcje. Część 3: Oddziaływania wywołane dźwignicami i maszynami
- PN-EN 1993-6 – Eurokod 3: Projektowanie konstrukcji stalowych – Część 6: Konstrukcje wsporcze dźwignic
- Kogajev, V. P., Machutov, N. A., & Gusenkov, A. P. (1985). Rascety detalej masin i konstrukcij na procnost i dolgovecnost. Spravocnik. Masiniostrojenie
- Chodor, L., Kowal, Z., Sendkowski, J., Zając, Z. (1991). Awaria komina stalowego w warunkach zmęczenia niskocyklowego, s.105–111, [https://chodor-projekt.net/wp-content/uploads/PIPress/Artykuly/1991-Chodor-Kowal-Awaria-komina-Szczecin.pdf]
________________________________



