
Analiza plastyczna przekrojów prętów stalowych w złożonym stanie naprężenia jest obecnie powszechnie wykorzystywana w związku z zaleceniami norm Eurokod, a zwłaszcza [1] i [2]. Z problemem wyznaczenia wysokości strefy ściskanej oraz położeniem osi obojętnej w granicznym stanie plastycznym przekrojów obciążonych jednoczesnym ściskaniem i dwukierunkowym zginaniem spotykamy się już przy wyznaczeniu klasy przekroju stalowego. W niniejszym artykule omówimy problem na użytek wyznaczania klasy dwuteowego przekroju stalowego poprzez adaptację klasycznych wyników uzyskanych przez [3].
W niniejszym artykule przedstawimy rozwiązania wynikające z podejścia statycznego do zadania teorii nośności granicznej (plastycznej), to znaczy uzyskane rozwiązania stanowią oszacowania rozwiązania od góry . Uzyskane wyniki są wystarczająco dokładne w praktyce inżynierskiej. W pracy [3] zaprezentowano oszacowania od dołu, wynikające z podejścia kinematycznego. Na wielu przykładach wykazano, że z podejścia statycznego najczęściej uzyskuje się rozwiązanie identyczne do rozwiązań kinematycznych, a w skrajnych przypadkach różniące się o max 1%.
Elementarny przekrój prostokątny
Przed rozwiązaniem zadania dla przekroju dwuteowego przedstawimy elementarne rozwiązanie dla przekroju prostokątnego. Na rys.1. pokazano przekrój prostokątny z hipotetyczną osią obojętną o równaniu z=g(y). Oś obojętna oddziela część rozciąganą przekroju (+)) od części ściskanej (-).
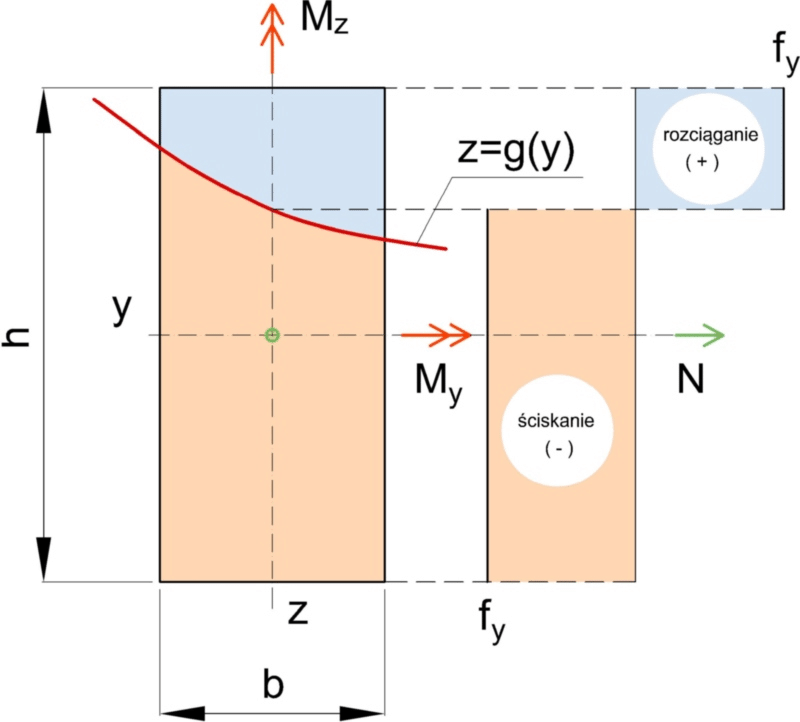
Rys.1 Hipotetyczna oś obojętna g(y) przekroju prostokątnego hxb w stanie plastycznym. fy – granica plastyczności
Załóżmy, że na przekrój działa siła osiowa N oraz momenty zginające My oraz Mz. Siły przekrojowe są znakowane zgodnie z zasadami mechaniki , więc są dodatnie jeśli ich wektory działąją zgodnie ze zwrotem osi współrzędnych. W praktyce oznacza to, że są dodatnie, jeśli wywołują naprężenia rozciągające w pierwszym kwadrancie układu współrzędnych (y-z). Zwracamy uwagę, że w EC3 [1], przyjęto, że dodatnie są naprężenia ściskające, a nie rozciągające.
Założona na rys.1. bryła naprężeń daje następujące siły przekrojowe [3]:
| $ N=- \int \limits_{-b/2}^{+b/2} 2 \cdot f_y \cdot g(y) dy$ | (1) |
| $ M_y= \int \limits_{-b/2}^{+b/2} [ \dfrac {h^2} {4}-g^2(y)] \cdot f_ydy$ | (2) |
| $ M_z= \int \limits_{-b/2}^{+b/2} 2 \cdot f_y \cdot y\,\cdot g(y)dy$ | (3) |
gdzie g(y) jest jeszcze nieznaną funkcją. Problem poszukiwania osi obojętnej – funkcji g(y), rozwiążemy w taki sposób, że znajdziemy maksymalną wartość My możliwą przy ustalonych pozostałych siłach przekrojowych: N, Mz. Przeprowadzimy ekstremalizację funkcjonału $\int F dA$, gdzie:
| $F= 2 \cdot f_y \cdot \left[ 1/2 \cdot [\dfrac {h^2} {4}-g^2(y)] -\lambda_1 \cdot y \cdot g(y)-\lambda_2 \cdot g(y)\right]$ | (4) |
λ1 i λ2 są z mnożnikami Lagrange’a poszukiwanymi zadania.
Równanie Eulera stowarzyszone z funkcjonałem $\int F dA$ można zapisać w postaci
| $ \dfrac{\partial F}{\partial g(y)}-\dfrac{d}{dy} \cdot \dfrac {\partial F} {\partial g^{’}(y)} =0$ | (5) |
skąd wynika:
| $ g(y)= – \lambda_1 \cdot y- \lambda_2 $ | (6) |
czyli że oś obojętna jest linią prostą o współczynniku kierunkowym λ1=tg θ, gdzie θ jest kątem nachylenia osi obojętnej do osi głównej y-y oraz współczynniku translacyjnym λ1=zN, który jest przesunięciem osi obojętnej przekroju w stosunku do osi y-y.
Po wykonaniu przypisanych całkowań siły przekrojowe można zapisać w postaci:
| $ N= 2 \cdot f_y \cdot b \cdot \lambda_2$ | (7) |
| $ M_y= 2 \cdot f_y \cdot \left [ \dfrac {bh^2} {8}- \dfrac {\lambda_1^2}{3} \cdot \left (\dfrac {b}{2} \right)^3- \lambda_2^2 \cdot \dfrac{b}{2}\right ]$ | (8) |
| $M_z= \dfrac {1} {6} \cdot f_y \cdot b^3 \cdot \lambda_1$ | (9) |
Po wyeliminowaniu z tych równań mnożników λ1 i λ2, otrzymamy proste równanie interakcji sił przekrojowych:
| $n^2+m_y+ \dfrac {3}{4}m_z^2=1$ | (10) |
ważne dla:
| $m_z \le \dfrac {2}{3}(1-n) \le m_y$ | (11) |
gdzie względne siły przekrojowe wynoszą: $n=N/N_{pl} \ , m_y=M_y/M_{y,pl} \ , m_z= M_z /M_{z.pl}$ , a nośności plastyczne przekroju: $N_{pl}=A \cdot f_y\ , M_{y,pl}=W_{y.pl}\cdot f_y \ , M_{z,pl}=W_{z,pl} \cdot f_y$ ; $A=b \cdot h \ , W_{y.pl}= \dfrac {b \cdot h^2}{4} \ , W_{z.pl}= \dfrac{h\cdot b^2}{4}$ .
Przy znajomości sił przekrojowych z powyższych równań możemy wyznaczyć mnożniki Lagrange’a:
| $\lambda_1=(tg\theta)= \dfrac { 6 M_Z} {f_y \cdot b^3} $ | (12) |
| $\lambda_2=(z_N)= \dfrac {N} {2 \cdot f_y \cdot b} $ | (13) |
co pozwala wyznaczyć położenie osi obojętnej.
W zależności od wzajemnych stosunków sił przekrojowych można ustalić, zestawione w tab.1. sytuacje o różnym układzie osi obojętnej oraz różnych równaniach interakcji.
Tab.1. Położenie osi obojętnej i krzywe interakcji dla przekroju prostokątnego
(opracowano na podstawie [3])
| Oś Obojętna | Równanie interakcji | Zakres ważności |
|---|---|---|
 | ||
 | ||
 |
Przekrój dwuteowy
Na rys.2. pokazano przekrój dwuteowy z hipotetyczną, dowolną osią obojętną o równaniu z=g(y).
 Rys.2 Hipotetyczna oś obojętna przekroju dwuteowego w stanie plastycznym. fy – granica plastyczności
Rys.2 Hipotetyczna oś obojętna przekroju dwuteowego w stanie plastycznym. fy – granica plastyczności
Postępując podobnie jak w w pkt 1. można pokazać, że hipotetycznie założona oś obojętna g(y) musi być linią prostą o równaniu
| $z=g(x)= -c\dfrac {y}{\lambda_3}-z_N$ | (14) |
gdzie
| $z_N= \dfrac {\lambda_4} {\lambda_3}$ | (15) |
Mnożniki Lagrange’a zależą od relacji wartości sił przekrojowych. Siły te można zapisać w postaci:
| $N=f_y \cdot z_N \cdot [ 4\cdot t_f\cdot\lambda_3 +2\cdot t_w]$ | (16) |
| $M_y= \dfrac {4} {3} \cdot f_y \cdot [(h/2)^3-(h/2-t_f)^3] \cdot \lambda_3+f_y \cdot [(h/2-t_f)^2- z_N^2]$ | (17) |
| $M_z=2 \cdot f_y \cdot \left[ b^2/4 \cdot t_f – \lambda_3^2/3 \cdot [ h^2/8 – (h/2-t_f)^3]-( \lambda_3\ \cdot z_N)^2 \cdot t_f \right]$ | (18) |
Znając wartości sił przekrojowych z tego układu równań można wyznaczyć mnożniki Lagrange’a, a następnie położenie osi obojętnej oraz równania interakcji.
 Rys.3 Prostoliniowa oś obojętna przekroju dwuteowego w stanie plastycznym w złożonym stanie naprężenia.
Rys.3 Prostoliniowa oś obojętna przekroju dwuteowego w stanie plastycznym w złożonym stanie naprężenia.
Po wyeliminowaniu z tych równań mnożników λ1 , λ2, λ3 i λ4 otrzymamy proste równania interakcji sił przekrojowych:
| $n=\dfrac {z_N}{A}[2 \cdot t_f \cdot \lambda_3 + t_w ]$ | (19) |
| $m_y=\dfrac {1}{W_{pl,y}} \left \{ \dfrac {4}{3} \left [h^3/8 – (h/2 -t_f)^3)] \cdot \lambda_3 + t_w \cdot[(h/2-t_f)^2-y_N^2] \right ]\right \}$ | (20) |
| $m_z=\dfrac {2}{W_{pl,z}} \left\{ [b^2/4 \cdot t_f -\dfrac {1}{3}[(h/2)^3 -(h/2 -t_f)^3)] \cdot \lambda_3^2- t_f\cdot (\lambda_3 \cdot z_N)^2 \right \} $ | (21) |
ważne dla:
| $0 \le z_N \le h/2-t_f$ | (22) |
| $\dfrac {t_w/2}{z_n+h/2-t_f} \le \lambda_3 \leq \dfrac {h/2}{d/2+z_N}$ | (23) |
gdzie względne siły przekrojowe wynoszą: $n=\dfrac{N}{N_{pl}}$ , $m_y= \dfrac{M_y}{M_{y.pl}}$, $m_z= \dfrac{M_z}{M_{z.pl}}$, a nośności plastyczne przekroju: wynoszą
| $N_{pl}=A \cdot f_y \ , M_{y,pl}=W_{y.pl}\cdot f_y \ , M_{z,pl}=W_{z,pl} \cdot f_y$ | (24) |
| $A=b \cdot h \ , W_{y.pl}=b \cdot t_f \cdot (h-t_f)+t_w \cdot (h/2-t_f)^2\ , W_{z.pl}=\dfrac {t_f \cdot b^2}{2}+\dfrac {t_w^2 \cdot(h-2 \cdot t_f)}{4}$ | (25) |
Przy znajomości sił przekrojowych z powyższych równań możemy wyznaczyć mnożniki Lagrange’a i położenie osi obojętnej.
W zależności od wzajemnych stosunków sił przekrojowych można ustalić, zestawione w tab. 2 osiem sytuacji o różnym układzie osi obojętnej oraz różnych równaniach interakcji.
Parametry linii osi obojętnej: zN, Θ=arctg λ3 wyznacza się z nieliniowego układu równań interakcji.
Tab.2. Położenie osi obojętnej i krzywe interakcji dla przekroju dwuteowego
(opracowano na podstawie [3])
| Oś Obojętna | Równanie interakcji | Zakres ważności |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  | |
 |  | |
 |  | |
 |  | |
 |  |
Przykład rachunkowy
Określić położenie osi obojętnej oraz współczynnik wysokości strefy ściskanej α, potrzebny do wyznaczenia klasy przekroju belki- słupa HEA300 pokazanego na rys. 4, obciążonego siłą ściskającą NEd= 500 kN oraz dwukierunkowym zginaniem momentami zginającymi: MyEd=200 kNm, MzEd=50 kNm.

Rys.1. Belka-słup poddana jednoczesnemu ściskaniu i zginaniu dwuosiowemu
W tab. 3 zestawiono charakterystyki geometryczne przekroju HEA300-S355, własności mechaniczne fy, ε oraz nośności plastyczne przekroju: Npl,Rd , Mpl,zRd, Mpl,yRd.
Tab.3. Charakterystyki geometryczne oraz materiałowe HEA300-S355

Względne wartości sił działających w przekroju wynoszą:
$n= \dfrac {N_{Ed}}{N_{pl,Rd}}=\dfrac {-500} {3994}=-0,125$,
$m_y= \dfrac {M_{y Ed}}{M_{pl,yRd}}=\dfrac {200} {491}=0,407$,
$m_z= \dfrac {M_{z Ed}}{M_{pl,zRd}}=\dfrac {50} {227,6}=0,220$.
Siła ściskająca siłą n jest ujemna.
Zwróćmy uwagę, że charakterystyki geometryczne przekroju HEA300 wyliczone z formuł przybliżonych, podanych w dolnym wierszu tab.2, wynoszą: A=106,3 cm2,Wpl,y=1305,1 cm3,Wpl,z=634,7 cm3, co stanowi dobre przybliżenie (ponad 95%) na użytek wyznaczenia położenia osi obojętnej.
Współczynniki pomocnicze wynoszą:
$n_2=(29/2)^2-(29/2-1,4)^2=38,6 \ , cm^2$,
$n_3=(29/2)^3-(29/2-1,4)^3=800,5 \, cm^3$.
W celu rozwiązania nieliniowych układów równań z tab.2. dla znanych sił przekrojowych z warunku zN oraz λ3 zastosowano podstawowe procedury arkusza kalkulacyjnego z wykorzystaniem modułu Solver. W wyniku rozwiązania problemu dla położenia osi obojętnej w pierwszym wierszu tab.2 otrzymano:
$z_N=0 \,cm$ ; $\lambda_3=0,40$ , czyli $\theta=arctg(\lambda_3)=19,8 \, deg$.
Literatura
- PN-EN 1993-1-1+A1:2006, Eurokod 3. Projektowanie konstrukcji stalowych, Część 1-1: Reguły ogólne i reguły dla budynków
- PN-EN 1993-1-5:2008, Eurokod 3: Projektowanie konstrukcji stalowych. Część 1-5: Blachownice
- Santathadaporn S., Chen W.-F. (1968). Interaction Curves for sections under com-bined biaxial bending and axial force (Report No 331.3; Space Frames with Biaxial Loading in Columns). Fritz ENgineering Laboratory, [ http://digital.lib.lehigh.edu/fritz/pdf/331_3.pdf ]
________________________________



