
Niniejszy artykuł jest rozdziałem 2-2 podręcznika Imperfekcyjna metoda projektowania konstrukcji [ ← spis treści]
Nawigacja: [Imperfekcje i ich źródła] ⇐ ⊗ ⇒ [ Geneza metod imperfekcyjnych]
Artykuł w ciągu ostatnich 24 godzin czytało 5 Czytelników
Trwa remanent po dużej awarii portalu. Przepraszam za nieczytelną część treści do zakończenia remanentu !
[ Imperfekcje , a układy usztywniające konstrukcję] [poprzednie] ⇐ ⊗ ⇒ [następne] [ Podsumowanie. Imperfekcje w normach światowych]
W klauzuli normowej [1], kl. 5.3.2(11) dopuszczono do stosowania alternatywny sposób uwzględniania zintegrowanych imperfekcji konstrukcji, który w rozdziale 1 (punkt Klasyfikacja metod) i na rys. 1.2 nazwaliśmy metodą AIM (Alternatywną metoda imperfekcyjną).
Geneza nazwy metody alternatywnej AIM
Nazwa metoda alternatywna przyjęła się w polskiej praktyce, a wywodzi się z normowego zapisu [1],kl. 5.3.2(11) : „ (11) Alternatywnie do reguł (3) (metoda uproszczona, imperfekcji zastępczych) i (6) (metoda ogólna smukłości systemu) można przyjąć, że kształt uogólnionej, zintegrowanej imperfekcji układu (…)” . Polega ona na doborze równoważnej, początkowej zintegrowanej geometrycznej imperfekcji układu podobnej do sprawczej postaci wyboczenia sprężystego. Metodę dopuszczono na przypadek wyboczenia giętnego ram przechyłowych.
W literaturze zagranicznej jest znana pod nazwą UGLI (Unique Global and Local Initial imperfection) [2] lub EUGLI (Equivalent Unique Global and Local Initial imperfection) [3] .
Metoda AIM nie jest zalecana w załączniku krajowym [1],NA.11 , ale mimo to w praktyce inżynierskiej rónież w Polsce staje się coraz częstszym sposobem wyznaczania amplitudy imperfekcji ze względu na swoją uniwersalność i możliwość zautomatyzowania w programach komputerowych, np. w programie Consteel [4] .
Fundamentalną własnością metody AIM jest to, że obejmuje ona zarówno lokalne (łukowe) jak i globalne (przechyłowe) typy imperfekcji dla całej konstrukcji. Dlatego mówimy, że jest to metoda zintegrowanych imperfekcji z uwzględnieniem korelacji miedzy nimi. Jest to bardzo zachęcająca cecha, ponieważ jednym z trudniejszych zagadnień standardowych metod imperfekcyjnych jest poszukiwanie korelacji (jednoczesności) imperfekcji lokalnych i globalnych, w wydzielonych elementach konstrukcji i ich zespołach.
Poniżej przytoczymy tylko podstawowe cechy metody w ujęciu normy Eurokod 9 oraz w dalszej kolejności Eurokod 3, tak by bezpośrednio nawiązać do zależności przedstawionych pkt. Skalowanie, gdzie szerzej omówiono główne założenia teorii metody AIM.
Klasyczna metoda AIM została dopuszczona w normach do stosowania jako alternatywa do stosowania imperfekcji przechyłowych i łukowych w stalowych ramach przechyłowych, wrażliwych na efekty II rzędu [1], kl. 5.3.2(3),(6) ) oraz aluminiowych [5], kl. 5.3.2(3),(6). To znaczy dotyczy ona utraty stateczności giętnej w płaszczyźnie zginania lub z jej płaszczyzny.
W pracach [6] , [7] i in. pokazano, że metodę AIM można stosować również w przypadku zwichrzenia układów prętów uogólnionych ( z uwzglednieniem deplanacji)
W pracy [8] pokazano, że zastosowanie metody dotyczy nie tylko prętów prostych, ale także zakrzywionych w łuk.
W niniejszym artykule pokażemy uogólniony algorytm zastosowania metody AIM do konstrukcji dowolnie złożonej.
Funkcja wyboczenia pręta uogólnionego
Pręt uogólniony, to pręt o przekroju cienkościennym podlegającym, teorii Własowa, to znaczy z siedmioma stopniami swobody z deplanacją jako dodatkowym stopniem swobody i stowarzyszoną z nim siłą przekrojową – bimomentem.
Przegląd funkcji wyboczenia poprzedzimy krótką prezentacją pola przemieszczeń i sił pręta uogólnionego.
Pole przemieszczeń i sił pręta uogólnionego
Na rys. 3-8.1. pokazano pole przemieszczeń i sił przekrojowych w pręcie uogólnionym. Konstrukcja jest złożona z N elementów <e>
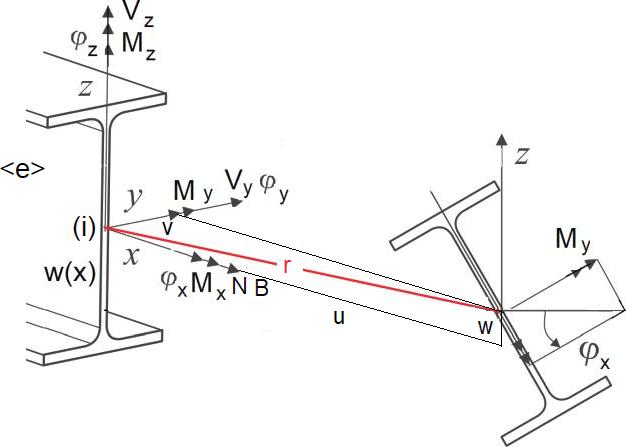
Rys.3-8.1 Pole przemieszczeń i siły przekrojowe przekroju pręta konstrukcji
W węźle (i) o współrzędnej (x) po osi prętów konstrukcji działają siły przekrojowe, które oznaczymy zbiorczym symbolem $F_s (x)$ indeksowanym rodzajem siły „s”:
$$\begin{equation} F_s(x)=[N(x) ,M_y(x) ,M_z(x), B(x)] \label {3-8.1} \end{equation}$$
Z siłami przekrojowymi są stowarzyszone przemieszczenia węzłowe:
liniowe :
u(x) – wydłużenie/skrócenie wzdłuż osi $x$, które powoduje powstanie siły osiowej $N$
w(x) – ugięcie pionowe w kierunku osi $z$, krtóre powoduje powstanie momentu zginającego $M_y$ (względem większej sztywności)
v(x) – ugięcie poziome poprzeczne do płaszczyzny zginania pręta, w kierunku osi $y$, które powoduje powstanie momentu zginającego $M_z,$ (względem mniejszej sztywności)
kątowe, to znaczy pierwsze pochodne przemieszczeń liniowych podług osi $x$:
$\varphi_x (x) = \cfrac{du}{dx}= u'(x)$ – kąt skręcenia przekroju wokół osi $x$, które powoduje powstanie bimomentu,
$\varphi_y (x) = \cfrac{dw}{dx}= w'(x)$ – kąt obrotu wokół osi $y$,
$\varphi_z (x) = \cfrac{dv}{dx}= v'(x)$- kąt obrotu wokół osi $z$,
Zależności na krzywizny wyboczonej osi pręta są następujące:
$$\begin{equation} \kappa_x (x)= {\varphi_x}” (x) \quad ; \quad\kappa_y(x) = w”(x) = \varphi_y'(x) \quad ; \quad \kappa_z(x)=v”(x)=\varphi_z'(x)\label {3-8.2} \end{equation}$$
gdzie:
$\kappa_x$ – deplanacja (spaczenie) przekroju ,
$\kappa_y$ – krzywizna ugięcia z płaszczyzny pręta,
$\kappa_z$ – krzywizna ugięcia w płaszczyźnie pręta.
Krzywizny jednoznacznie definiują siły przekrojowe wywołane wygięciem postaci wyboczonej w przestrzeni:
$$\begin{equation} N(x) = – EA \cdot u'(x) \quad ; \quad M_y(x) =- EI_y \cdot w”(x) \quad ; \quad M_z(x) = – EI_z \cdot v”(x) \quad ; \quad B(x)= – EI_\omega \cdot {\varphi_x}” (x) \label {3-8.3} \end{equation}$$
gdzie $E$ jest modułem Younga materiału, a znak (-) przed czynnikiem z $u'(x)$ dotyczy przypadku ściskania pręta, które jest związane z utratą stateczności. Dla przypadku rozciągania pręta znak należy zmienić na przeciwny.
Pole przemieszczeń i sił funkcji wyboczenia
Funkcja wyboczenia pręta jest wirtualnym polem przemieszczeń i sił wywołanych tymi przemieszczeniami, które jest obserwowane w stanie krytycznym, to znaczy w takim stanie po osiągnięciu którego układ lub elementu tego układu traci stateczność sprężystą.
Pole przemieszczeń i sił funkcji wyboczenia można opisać wielkościami zaprezentowanymi w poprzednim punkcie, przy czym w celu odróżnienia wielkości i pól obserwowanych w stanie krytycznym „cr” od wielkości wywołanych obciążeniami zewnętrznymi, wielkości w stanie krytycznym będziemy indeksowali wskaźnikiem $_{cr}$.
Postacie i formy wyboczenia oraz mnożnik krytyczny obciążeń
Należy odróżnić postacie od form wyboczenia.
Formy wyboczenia związane są z fizyczną interpretacją zjawiska. Dla pręta uogólnionego rozróżniamy wyboczenie giętne polegające na wygięciu pręta w płaszczyźnie lub z płaszczyzny, wyboczenie skrętne polegające na skręceniu przekroju wokół własnej osi oraz wyboczenie gięto -skrętne, polegające na przemieszczeniu z jednoczesnym obrotem.
Każda forma wyboczenia może mieć wiele postaci związanych z kształtem funkcji wyboczenia po długości pręta. Na przykład w przypadku przegubowo-przegubowego pręta ściskanego pierwszą postacią własną jest sinusoida o jednej półfali, a drugą postacią jest sinusoida o dwóch półfalach, itd. Funkcje wyboczenia uzyskiwane są dla kolejnych postaci wyboczenia w trakcie analizy LBA.
Podstawową wielkością charakteryzującą funkcję wyboczenia jest mnożnik krytyczny obciążeń zewnętrznych
$\Lambda_{cr}$ (1-1.13),
który jest takim mnożnikiem sił zewnętrznych $F$, że pod obciążeniami $\Lambda_{cr}\cdot F$ osiągnięty zostaje stan krytyczny układu. Z wielu postaci wyboczenia wybieramy taką dla której mnożnik $\Lambda_{cr}$ jest minimalny. Tę postać nazywamy pierwszą postacią własną.
W normie [1] mnożnik $\Lambda_{cr}$ jest oznaczany jako $\alpha_{cr}$ W niniejszym podręczniku oznaczamy go inaczej w celu dostosowania do klasycznych teorii mechanicznych i w celu odróżnienia od parametru imperfekcji $\alpha$.
Mnożnik krytyczny sił przekrojowych w stanach prostych
Mnożnik krytyczny siły przekrojowej $\Lambda_{cr,s}(x)$ rodzaju „s” ($\ref{3-8.1}$) definiujemy przez analogię do mnożnika krytycznego sił zewnętrznych $\Lambda_{cr}$ (1-1.13) jako
$$\begin{equation} \Lambda_{cr,s}(x) = \cfrac {F_{Rk,s}(x) / \gamma_{M1}} {F_{cr,s}(x)}\label {3-8.4} \end{equation}$$
gdzie:
$F_{cr,s}(x)$ – siła rodzaju „s” wywołana krzywizną osi postaci wyboczonej „cr” w przekroju konstrukcji o współrzędnej (x). Siła ta jest wyznaczana w sposób bezpośredni, co pokażemy w dalszej części artykułu,
$\gamma_{M1}=1,1 $ – współczynnik materiałowy dla analiz związanych ze statecznością konstrukcji.
Nośności charakterystyczne wylicza się z zależności
$$\begin{equation} F_{Rk,s}(x)=W_s \cdot f_y \label {3-8.5} \end{equation}$$
gdzie
$$\begin{equation} W_s =
\begin{cases}
A & \text { dla } s=N\\
W_y=I_y/z_{max} & \text { dla } s=M_y \\
W_z=I_z/y_{max} & \text { dla } s=M_z \\
W_\omega=I\omega / \omega_{max} & \text { dla } s=B \\
\end{cases}
\label {3-8.6} \end{equation}$$
Powyższe ujęcie jest zgodne z nomenklaturą przyjętą w normach Eurokod [1] i in., gdzie stosuje się wyrażenia w siłach przekrojowych. W tym przypadku siły przekrojowe są wirtualnymi siłami wywołanymi krzywizną osi wyboczonego pręta bez udziału obciążeń zewnętrznych.
W złożonym przypadku utraty stateczności prościej jest posługiwać się wyrażeniami w naprężeniach. Takie podejście jest stosowane m.in. przez [6] i in. W niniejszym artykule stosujemy opis w odkształceniach i następnie w przemieszczeniach.
Mnożnik krytyczny sił przekrojowych w stanie złożonym
Ponieważ zagadnienia stateczności rozpatruje się w stanie sprężystym, więc wytężenie przekroju (i) o współrzędnej (x) elementu <e> jest liniową sumą wytężenia powodowanego przez poszczególne siły przekrojowe działające w tym przekroju, a mnożnik sił przekrojowych uwzględniający wszystkie składowe funkcji wyboczenia można wyznaczyć z formuły:
$$\begin{equation} \cfrac{1}{\Lambda_{cr, tot}(x)} = \sum \limits _{s=1}^r \cfrac{1}{ \Lambda_{cr,s}(x)} \label {3-8.7} \end{equation}$$
gdzie „r” jest liczbą rodzajów sił przekrojowych.
Mnożnik sił przekrojowych $\Lambda_{cr,tot}$ nazywamy mnożnikiem zupełnym (ang. total).
W rozpatrywanym przypadku dla sił ($\ref{3-8.1}$) mamy r=4, a ($\ref {3-8.7}$) można rozpisać jak następuje
$$\begin{equation} \cfrac{1}{\Lambda_{cr, tot}(x)} = \cfrac {1} { \Lambda_{N_{cr}(x) } } +\cfrac{1}{\Lambda_{M_y{cr}(x)}}+\cfrac{1}{\Lambda_{M_z{cr}(x)}}+\cfrac{1}{ \Lambda_{B_{cr,}(x)}} \label {3-8.8} \end{equation}$$
Mnożnik sił przekrojowych w odkształceniach
Siły przekrojowe ($\ref{3-8.1}$) mogą być wyrażone przez przemieszczenia osi pręta formułami ($\ref{3-8.3}$) indeksowanymi przez $_{cr}$
Po podstawieniu ($\ref{3-8.3}$) do ($\ref{3-8.7}$) i uwzględnieniu ($\ref{3-8.4}$)-($\ref{3-8.6}$) otrzymamy formułę na całkowity mnożnik sił przekrojowych w odkształcenaich $\Lambda_{cr,tot}$,
$$\begin{equation} \Lambda_{cr,tot}(x) = \cfrac {\beta_m}{ \varepsilon_{tot} (x)} \label {3-8.9} \end{equation}$$
Współczynnik materiałowy $ \beta_m=\cfrac{f_y}{E \cdot \gamma_{M1}}$,
gdzie:
$f_y$, granica wytrzymałości materiału (plastyczności stali)
$E=210 \, GPa$ – moduł Younga stali (ogólnie materiału),
$\gamma_{M1}=1,1$ dla analiz stateczności,
Dla najczęściej spotykanych stali bezwymiarowy współczynnik $\beta_m$ wynosi
$$\begin{equation} \beta_m =
\begin{cases}
1,017 \cdot 10^{-3} & \text { dla S235} \\
1,537 \cdot 10^{-3} & \text { dla S355} \\
1,991 \cdot 10^{-3} & \text { dla S460} \\
2,165\cdot 10^{-3} & \text { dla S500} \\
\end{cases}
\label {3-8.10} \end{equation}$$
Funkcja całkowitego, maksymalnego odkształcenia $\varepsilon _{tot} (x)$ jest obliczana z zależności:
$$\begin{equation} \varepsilon_{tot} =\varepsilon_N +\varepsilon_{M_y}+\varepsilon_{M_z}+\varepsilon_B \label {3-8.11} \end{equation}$$
Mnożnik sił przekrojowych w przemieszczeniach
Odkształcenia normalne punktu przekroju, występujące w ($\ref{3-8.11}$) są funkcją współrzędnych $(x,y,z,\omega)$ tego przekroju ($\omega$ jest główną współrzędna wycinkową) :
$$\begin{equation} \varepsilon_N= u_{cr}’ \, ; \quad \varepsilon_{M_y} = \overline w_{cr}” \cdot \, ; \quad \varepsilon_{M_z} = \overline v_{cr}” \cdot y \, ; \quad \varepsilon_B = \varphi_{x,cr}” \cdot \omega \label {3-8.12} \end{equation}$$
Pochodne przemieszczeń $u_{cr}'(x) , w_{cr}”(x) ,v_{cr}”(x), \varphi_{x,cr}”(x) $, wyznacza się metodą bezpośrednią w sposób pokazany w kolejnym punkcie.
Istnieje taki punkt obliczeniowy przekroju $( y,z,\omega)_{d} =(y_{max}, z_{max}, \omega_{max})$, że wszystkie składowe odkształceń sumują się.
Rozpatruje się niezerowe składowe postaci wyboczonej. Na przykład dla standardowego zwichrzenia pręta (wyboczenia bocznego ze skręceniem) niezerowe jest $v_{cr}$ oraz $\varphi_{cr}$, a wyrażenie na funkcję krzywizny sprowadza się do:
$$\begin{equation} \varepsilon _{tot} (x) = \varepsilon_{M_z} (x) + \varepsilon_B (x) \label {3-8.13} \end{equation}$$
Metoda bezpośrednia szacowania krzywizny funkcji wyboczenia
Podstawowym zagadnieniem metody AIM jest wyznaczenie składowych krzywizn funkcji wyboczenia (postaci własnej) występujących w ($\ref{3-8.11}$), a w konsekwencji sił przekrojowych ($\ref{3-8.3}$). Ponieważ wielkości te nie są elementami rozwiązania standardowych procedur LBA, więc należy stosować metody bezpośredniego różniczkowania: metodę różnic skończonych lub krzywych regresji. Wraz z rozwojem współczesnych programów do obliczeń konstrukcji należy spodziewać się, że ręczne różniczkowanie bezpośrednie zostanie zastąpione procedurami numerycznymi.
Linię funkcji wyboczenia: pionową $w(x)$, poziomą $v(x)$ lub skręcenia $\varphi_x(x)$ będziemy do celów wyznaczania krzywizny oznaczać wspólnym symbolem $\eta(x)$
Metoda różnic skończonych dla linii przemieszczeń postaci własnej
Do wyznaczenia krzywizny $\eta^{”}_i $ w punkcie „i” najczęściej stosuje się różnice skończone z użyciem trzech kolejnych wartości postaci wyboczonej.
Dla punktu pośredniego (i) stosujemy różnicę centralną:
$$\begin{equation} \eta^{”}_i \approx \cfrac{ \eta_{i-1} – 2 \cdot \eta_i + \eta_{i+1}} { \Delta x^2} \label {3-8.14} \end{equation}$$
gdzie $\Delta x$ jest długością odcinka dyskretyzacji
W związku z brakiem punktów skrajnych: dla punktu początkowego (i) stosujemy różnicę progresywną (do przodu), a dla punktu końcowego stosujemy różnicę wsteczną. W różnicy progresywnej bierzemy punkty [(i-2, i+1, i+2] ,a w przypadku różnicy wstecznej punkty [ i, i-1,i-2]
Krzywizny możemy wyznaczać na oryginalnej linii $\eta(x)$ lub linii znormalizowanej do największej wartości
$$\begin{equation} \overline \eta(x) = \cfrac{\eta(x)}{\eta_{max}} \label {3-8.15} \end{equation}$$
Wówczas uzyskane krzywizny $\overline \eta^{„}$ można sprowadzić do oryginalnych poprzez wsteczne przeskalowanie:
$$\begin{equation} \eta^{”}(x) = \eta_{max} \cdot \overline \eta^{”}(x) \label {3-8.16} \end{equation}$$
Metoda różnic skończonych dla kątów obrotu postaci własnej
Podczas wyznaczania numerycznego postaci wyboczenia oprócz wartości przemieszczeń $\eta$ tej linii często wyznaczane są kąty obrotu $\eta^{’}$. Miejsce zerowania się tych kątów obrotu oznacza punkt przegięcia tej linii lub punkt stacjonarny , czyli miejsce, w którym krzywizna osiąga ekstremum. Przekrój sprawczy „m” jest przekrojem, w którym kąty obrotu zerują się.
Na podstawie linii kątów obrotu można wyznaczyć krzywizny poprzez jednokrotne różniczkowanie. Dokładność metody kątów obrotu jest znacznie lepsza od metody różnic skończonych dla linii przemieszczeń, ponieważ kąty obrotu są wyznaczane w z dużą dokładnością w algorytmie MES oraz dlatego że stosuje się różnice skończone pierwszego rzędu, które dla aproksymacji centralnej (dla punktu pośredniego) mają postać:
$$\begin{equation} (\eta^{”})_i \approx \cfrac{ \eta^{’}_{i+1} – \eta^{’}_{i-1} } { 2 \cdot \Delta x} \label {3-8.17} \end{equation}$$
W przypadku punktu początkowego i końcowego przyrost wartości funkcji wyznaczamy z punktu końcowego i przyległego i dzielimy przez jeden przyrost $\Delta x$.
Metoda półanalityczna
W metodzie tej najpierw na podstawie wartości otrzymanych z rozwiązania numerycznego – wyznacza się parametry krzywej regresji o założonej postaci funkcyjnej. Następnie funkcję różniczkuje się analitycznie.
Przekrój sprawczy
Przekrój sprawczy „m” w miejscu o rzędnej $x= x_m$ jest takim przekrojem (miejscem) konstrukcji, w którym zupełny, krytyczny mnożnik sił przekrojowych $ \Lambda_{cr, tot}(x)$ ($\ref{3-8.9}$) wywołanych postacią własną (odkształceniami osi pręta wyboczonego bez obciazeń zewnętrznych) przyjmuje najmniejszą wartość:
$$\begin{equation} \min \limits_{all} { \Lambda_{cr, tot} (x) } \to x_m=x \label {3-8.18} \end{equation}$$
przy czym przeszukiwanie minimum obejmuje wszystkie przekroje konstrukcji (all).
Przekrój sprawczy (krytyczny ) konstrukcji „m” jest przekrojem, który decyduje o wytężeniu całej konstrukcji i integralnie opisuje sztywność i wytrzymałość systemu kontrukcyjnego.
Zależność ($\ref{3-8.18}$) jest podstawową formułą wykorzystywaną do poszukiwania przekroju sprawczego „m” w konstrukcji, ale także poprzez manipulacje formułą ($\ref{3-8.8}$) może służyć do oceny wrażliwości konstrukcji na poszczególne składowe przemieszczenia krytycznego, to znaczy na formy wyboczenia. Cecha ta jest istotna w procesie projektowania konstrukcji, bo pozwala ustalić miejsca krytyczne i w rezultacie optymalnie rozmieścić stężenia, podpory oraz sztywności elementów wyłącznie na podstawie pseudoliniowej analizy wyboczeniowej LBA bez potrzeby angażowania bardziej zaawansowanych obliczeń.
Alternatywna, zintegrowana imperfekcja konstrukcji
Sprowadzona funkcja imperfekcji
Sprowadzona funkcja imperfekcji ma dwie cechy:
- zaletę imperfekcji alternatywnej, czyli integruje rodzaje imperfekcji: łukowe i przechyłowe,
- sprowadza różne formy wyboczenia: giętne, skrętne i giętno-skrętne w jedną dominującą formę
Imperfekcja alternatywna integruje rodzaje imperfekcji
Podstawową zaletą alternatywnej imperfekcji w stosunku do klasycznych imperfekcji konstrukcji jest to że jest ona zastępczą imperfekcją, obejmującą integralnie impefekcje łukowe i przechyłowe, czyli elementu i układu elementów
W niniejszym artykule analizujemy imperfekcje alternatywne, dziedziczące cechy sprężystej funkcji wyboczenia. W dalszej części podręcznika uogólnimy to podejście na przypadek wyboczenia sprężysto-plastycznego.
Sprowadzona funkcja wyboczenia integruje formy wyboczenia
Wprowadzimy pojęcie imperfekcji sprowadzonej, która integruje w sobie różne formy wyboczenia: wyboczenie giętne, skrętne i giętno-skretne (zwichrzenie), jeśli tylko ich analiza jest możliwa w użytym modelu. Zastosowany model pręta Własowa umożliwia analizę tych wszystkich form wyboczenia.
Zgodnie z prezentacją w pkt Pole przemieszczeń i sił pręta uogólnionego w ogólnym przypadku złożonym postać własna $”cr”$ ma składową: pionową $w_{cr} (x)$, poziomą $v_{cr} (x)$ oraz skręcenia $\varphi_{x,cr} (x)$ (p. rys. 3-8.1). Składowe te odpowiadają prostym postaciom wyboczenia: $w_{cr} (x)$ – giętnemu w płaszczyźnie głównej; $v_{cr} (x)$ – giętnemu z płaszczyzny; $\varphi_{x,cr} (x)$ skrętnemu wokół osi pręta.
Złożony stan wyboczenia sprowadzamy do stanu $\eta_{cr}$ podobnego do jednej z postaci wyboczenia giętnego: w płaszczyźnie pręta $w_{cr}$ lub z płaszczyzny $v_{cr}$, tak aby odkształcenie pręta $\varepsilon_\eta$ w stanie sprowadzonym $\eta_{cr}$ i złożonym $\varepsilon _{tot}$ ($\ref{3-8.11}$) było takie samo, czyli stosujemy kryterium
$$\begin{equation} \varepsilon_{\eta_{cr}} =\varepsilon_{tot} \label {3-8.19} \end{equation}$$
Po porównaniu ($\ref{3-8.11}$) z odkształceniem $\varepsilon_{\eta_{cr}}= \eta”(x_m)\cdot \zeta_{max} $ od wygięcia sprowadzonego $\eta_{cr}$ otrzymamy wyrażenie na krzywiznę sprowadzoną
$$\begin{equation} {\eta”}_{cr} = \cfrac{\varepsilon_{tot} }{\zeta_{max}} \label {3-8.20} \end{equation}$$
gdzie:
$\zeta_{max}$ jest współrzędną punktu przekroju z maksymalnymi odkształceniami normalnymi w układzie głównych, centralnych osi bezwładności.
W przypadku sprowadzania funkcji wyboczenia do wyboczenia bocznego przyjmuje się $\zeta_{max}=y_{max}$ lub $\zeta_{max}=z_{max}$ w przypadku sprowadzania funkcji wyboczenia do wyboczenia giętnego względem osi większej sztywności.
Na podstawie sprowadzonej krzywizny ($\ref{3-8.20}$) można wyznaczyć sprowadzony moment krytyczny $M_{\eta,cr}(x)$ w przekroju o współrzędnej (x):
$$\begin{equation} M_{\eta,cr}(x)=- EI(x) \cdot \eta”_{cr}(x) \label {3-8.21} \end{equation}$$
gdzie EI jest sztywnością przekroju odpowiednią do sprowadzonej formy wyboczenia: $EI=EI_y$ – jeśli sprowadzamy funkcję wyboczenia do wyboczenia z przemieszczeniem $w(x)$ lub $EI=EI_z$ – jeśli sprowadzamy ją do wyboczenie z płaszczyzny (np przy zwichrzeniu)
Zastosowanie zasad alternatywnej metody AIM do imperfekcji sprowadzonych
Po sprowadzeniu złożonej funkcji imperfekcji [ w_{cr}, u_{cr}, \varphi_{x,cr}] do jednej imperfekcji $\eta_{cr}$ możemy stosować procedurę alternatywną przewidzianą przez normy [1],kl. 5.3.2 (11) oraz [5],kl. 5.2. (11) .
Fundamentalne założenie metody AIM
Podstawowym założeniem (hipotezą Chladný) metody AIM, jest przyjęcie, że kształt alternatywnej, równoważnej, zintegrowanej imperfekcji układu $\eta_{init}(x)$ jest podobny do unormowanej funkcji wyboczenia sprężystego $\overline \eta_{cr}(x)$, z amplitudą $A_m$ wg zależności (zmodyfikowane [5],(5.6) ) :
$$\begin{equation} \eta_{init}(x) = A_m \cdot \overline \eta_{cr}(x) \label {3-8.22} \quad \to \eta_{init,max}= A_m\end{equation}$$
Funkcja wyboczenia sprężystego $\overline \eta_{cr}(x)$ odpowiada tej postaci wyboczenia, dla której minimalny jest mnożnik krytyczny obciążeń $\Lambda_{cr}$, uzyskany podczas analizy LBA.
Unormowanie funkcji wyboczenia sprężystego polega na przeskalowaniu oryginalnej funkcji postaci własnej poprzez maksymalną rzędną $\eta_{cr, max}$, czyli
$$\begin{equation} \overline \eta_{cr}(x) = \cfrac{\eta_{cr}(x)}{\eta_{cr, max} }\label {3-8.23} \end{equation}$$
to znaczy w rezultacie maksymalna rzędna funkcji unormowanej wynosi 1.
Amplituda alternatywnych imperfekcji
Amplitudę alternatywnych imperfekcji $A_m$ przyjmuje się jak dla przekroju sprawczego (krytycznego) „m” o współrzędnej $x=x_m$ zdefiniowanego w pkt Przekrój sprawczy i wyznacza się z zależności
$$\begin{equation} A_m = e_{0,d} (x_m) \cdot \cfrac {N_{cr}(x_m)} {\overline M_{\eta,cr}(x_m)} \label {3-8.24} \end{equation}$$
Amplituda $A_m$ wyznaczana jest w jednym przekroju konstrukcji, nazywanym przekrojem sprawczym i jest stałą zagadnienia.
Moment zginający $\overline M_{\eta,cr}(x_m)$ obliczany jest z zależności ($\ref{3-8.21}$).
W przypadku prostym wyrażenie na krytyczny moment zginający $\overline M_{\eta,cr, m}$ upraszcza się do zależności podanej w normie [5]
$\overline M_{\eta, cr ,m}=EI_m \cdot |\eta”_{cr,m}|$
Krytyczna siła osiowa $N_{cr}(x)$ w przekroju o współrzędnej (x) jest przeskalowaną siłą osiową $N_{Ed} (x)$ wywołaną obciążeniami zewnętrznymi (nie jest to siła wynikająca ze skrócenia pręta $u_{cr}'(x)$ postaci wyboczonej ($\ref {3-8.3}$) według zależności:
$$\begin{equation} N_{cr}(x)=\Lambda_{cr}\cdot N_{Ed}(x) \label {3-8.25} \end{equation}$$
Mimośród nośności przekroju
Wartość obliczeniową mimośrodu nośności $e_{0, d}(x) $ w przekroju o współrzędnej (x) wyznacza się z zależności
$$\begin{equation} e_{0,d}(x)=\cfrac{e_{0,k}(x)} {\gamma_{e0}} \label {3-8.26} \end{equation}$$
gdzie wartości charakterystyczna tego mimośrodu wynosi
$$\begin{equation} e_{0, k}(x)= \Theta \cdot \cfrac{M_{Rk}(x)}{N_{Rk}(x)} \label {3-8.27}= \Theta \cdot \cfrac {W_s (x)}{A(x)}\end{equation}$$
gdzie parametr imperfekcji $\Theta = \alpha \cdot ( \overline \lambda(x) – \overline \lambda_0 )$,
wskaźnik wytrzymałości $W_s =W_y $ lub $W_z$ w zależności od kierunku sprawczej postaci wyboczenia (w płaszczyźnie lub z płaszczyzny).W zależności od klasy przekroju wskaźnik wytrzymałości będzie plastyczny $W_{pl}$ dla klasy 1 przekroju, sprężysty $W_{el}$ dla klasy 2 i 3 lub efektywny $W_{ef} $ dla klasy 4-tej.
Współczynnik bezpieczeństwa $\gamma_{e0}(x)$ wyznacza się z zależności:
$$\begin{equation} \gamma_{e0}(x) =\cfrac {1-k_{\chi_d}(x)} {1-k_{\chi}(x)} \label {3-8.28}\end{equation}$$
$$\begin{equation} k_\chi(x)= {\chi}(x) \cdot \overline \lambda(x) ^2 \label {3-8.29} \end{equation}$$
$$\begin{equation} k_{\chi,d}(x)= \cfrac {k_{\chi(x)}} { \gamma_{M1}} \label {3-8.30} \end{equation}$$
gdzie $\gamma_{M1} = 1,1$ – częściowy współczynnik bezpieczeństwa przy sprawdzaniu stateczności elementów,
Współczynnik wyboczeniowy $\chi(x)$ wyznacza się z klasycznych zależności (1-3.3) + (1-3.4 ) dla smukłości układu $\overline \lambda(x)$ wyznaczonej z ogólnej zależności 1-1.2 w przekroju o współrzędnej (x)”:
$$\begin{equation} \overline \lambda(x) =\sqrt{\cfrac{N_{Rk}(x)}{N_{cr}(x)}} \label {3-8.31} \end{equation}$$
Po podstawieniu ($\ref{3-8.26}$) do ($\ref{3-8.31}$) oraz uwzględnieniu tego, że $\cfrac{N_{Rk}}{N_{Ed}}=\Lambda_pl = \alpha_{ult}$ otrzymamy alternatywne, nowoczesne wyrażenie na smukłość systemu, stosowane w metodzie wyboczeniowej ogólnej:
$$\begin{equation} \overline \lambda(x) =\sqrt{\cfrac{\Lambda_{pl}}{\Lambda_{cr}}} = \sqrt{\cfrac{\alpha_{ult}}{\alpha_{cr}}}\label {3-8.32} \end{equation}$$
zapisane z użyciem oznaczeń stosowanych w niniejszej pracy $\Lambda_{pl}$, $\Lambda_{cr}$ -plastyczny i krytyczny mnożnik obciążeń oraz oznaczeń normowych $\Lambda_{pl}=\alpha_{ult}$ , $\Lambda_{cr} = $\alpha_{cr}$.
Smukłość progowa $\overline \lambda_0$ dla konstrukcji stalowych zwykle wynosi 0,2 i wyznacza się wg zależności 1-3.2 , a dla konstrukcji aluminiowych przyjmuje się wg [5],tab.6.6 .
Parametr imperfekcji $\alpha$ dobiera się z tab.1-3.2. dla krzywej wyboczeniowej właściwej dla przekroju pręta stalowego (tab. 3-2.2) lub dla konstrukcji aluminiowych z [5],tab.6.6 i (6.3.1.2) .
Nośności charakterystyczne przekroju: na ściskanie $N_{Rk}(x)$, oraz na zginanie $M_{Rk}(x)$ wyznacza się standardowo z zależności ($\ref{3-8.11}$) w przekroju o współrzędnej (x), czyli dla $A=A(x)$ i $W_y=W_y(x)$.
Momenty zginające w układzie z imperfekcjami
Jeśli przekrój sprawczy wyznacza się metodą bezpośrednią poprzez badanie krzywizny funkcji wyboczenia, to momenty zginające w układzie z imperfekcjami wywołane działaniem siły osiowej $N_{Ed}$ można wyznaczyć w dowolnym punkcie (x) konstrukcji z zależności [8] :
$$\begin{equation} M_{ \eta,init}(x) = a_\Lambda \cdot e_{0,d,m} \cdot N_{Ed,(x)} \label {3-8.33} \end{equation}$$
gdzie współczynnik amplifikacji $a_\Lambda$ wyznacza się z zależności (1-1.12)
Numeryczne wyznaczenie alternatywnych imperfekcji
W obliczeniach numerycznych proces wyznaczenia alternatywnych imperfekcji może być zautomatyzowany, co umożliwia zastosowanie uniwersalnej procedury do dowolnej klasy konstrukcji. To stanowi siłę metody AIM, podobnie jak powszechne stosowanie w obliczeniach statycznych metody elementów skończonych w odmianie przemieszczeniowej, a nie elementów brzegowych lub odmianie naprężeniowej.
Program tpressInText item=”{8UQ4SM73 udostępnia podręczny kalkulator, w którym inżynier dla wskazanego myszką elementu podaje długość efektywną elementu, wartość wstępnej amplitudy zgodnie z Tab. 3.1 oraz oś względem, której ocenia amplitudę. Na podstawie wcześniej przeprowadzonej analizy wyboczeniowej (LBA) program odczytuje dla ocenianego elementu: siłę osiową , nośności przekroju elementu i , mnożnik krytyczny , smukłość elementu , parametr imperfekcji (krzywą wyboczeniową), odpowiadający współczynnik wyboczeniowy , a także moment drugiego rzędu , stowarzyszony z postacią wyboczenia, a w końcu poszukiwaną amplitudę imperfekcji łukowej (3.10) o wartości maksymalnej.
Przykłady rachunkowe
Przykład 3-8.1 [ściskana belka widełkowo podparta ]
[7],Beispiel 1
Prosty pręt z przekrojem dwuteowym podparty widełkowo ze stała siła ściskającą ciągłym zginanie od obciążenia równomiernego.
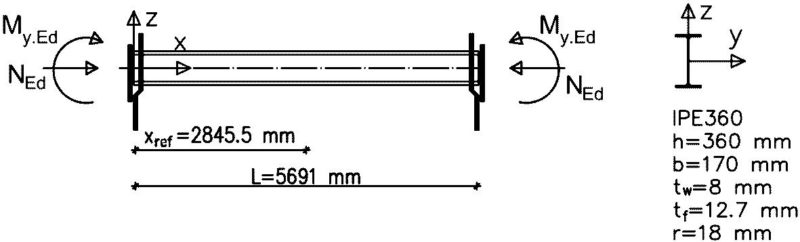
Rys.3-8.1 Schemat statyczny belki do przykąłdu 3-8.1
[7],Fig. 4
Przykład 3-8.2 [ściskana belka widełkowo podparta ]
Rozważmy, pokazany na rys. 3-8.2 prosty, swobodnie podparty pręt .
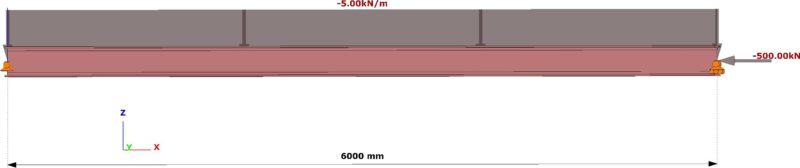
Rys. 3-8.2 Schemat belki do przykładu 3-8.1
Długość pręta L = 6 m;
Obciążenie poprzeczne: $ Q_{Ed} = 5,0 \, kN/m$
Obciążenie podłużne przyłożone na końcu elementu $N_{Ed}= 500,0 \,kN$
Materiał S235:
$f_y = 235 \, MPa$,
$E = 210 \,GPa$
Przekrój : HEA 260:
$A= 86,8 \, cm^2 $,
$ I_y=10450 \, cm^4 $,
$I_z= 3670 \, cm^4$,
$I_\omega= 516,4 \cdot 10^3 \, cm^6$
$z_{max}= 12,5 \, cm$,
$W_y=836\, cm^3 $ ,
$y_{max}= 13 \, cm$,
$W_z=282\, cm^3 $,
$\omega_{max}= 154 \, cm^2$,
$W_\omega=3350\, cm^4 $.
Przekrój wybacza się bocznie względem osi „z-z””
Tab.3-2.2 $\to$ krzywa wyboczeniowa „c”
Tab.1-3.2 $\to$ parametr impefekcji $\alpha = 0,49$
Analiza LBA
Pręt podzielono na N= 32 elementy i wyznaczono wartość postaci odkształconej w każdym węźle (i=1, 33).
Długość odcinka podziału wynosi $\Delta x=\cfrac{6}{32}=0,1875 \, m$
Na rys. 3-8.31 pokazano postać wyboczenia belki- słupa, którą uzyskano z analizy LBA dla pierwszej (minimalnej) wartości krytycznego mnożnika obciążeń i maksymalnej rzędnej w kierunku osi Y ( z płaszczyzny zginania)
$\Lambda_{cr} = 3,92$.
$\eta_{cr,max} = 22,62\, mm$.
Postać odpowiada wyboczeniu bocznemu – giętno-skrętnemu z płaszczyzny zginania (zwichrzeniu)
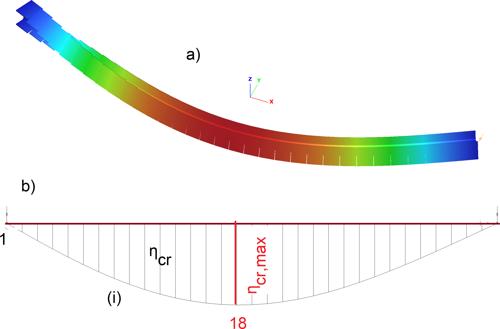
Rys. 3-8.3 Wyniki analiz LBA
Tab.3-8.1. Wyniki analiz LBA
W tab. 3-8.1 zestawiono fragment obliczeń z wynikami analizy LBA:
kol (1) – współrzędne bieżące pręta;
kol (2) do (7) przemieszczenia postaci wyboczonej uzyskane w programie Consteel w. 13 w procedurze LBA.
Niezerowe jest przemieszczenie poziome $v$ oraz obrót wokół własnej osi $\varphi_x$ oraz kąt ugięcia $\varphi_z=v'(x)$.Wynika stąd , że postać wyboczona odpowiada utracie stateczności giętno-skrętnej (zwichrzeniu).
kol. (8) – siła osiowa $N_{Ed}$ – stała po długości pręta i wynosi 500 kN (ściskanie).
kol. (9) – siła krytyczna $N_{Ed}=\Lambda_{cr} \cdot N_{Ed}= 3,92 \cdot 500 = 1960 \, kN$
kol. (10) – moment zginający $M_{Ed}$ z analizy pierwszego rzędu.
kol. (11) i (12) znormalizowane rzędne $v(x)$ odpowiednio z linii postaci własnej i z korelacji.
Krzywizny postaci własnej
Przykłady obliczeń krzywizn postaci własnej pokażemy dla przekroju x=L/2=3 m, które później zidentyfikujemy jako przekrój sprawczy.
Tab.3-8.2. Szacowanie krzywizn funkcji wyboczenia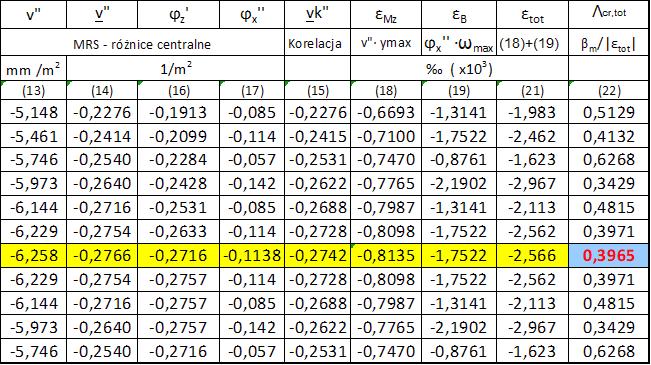
Metoda półanalityczna
Z analizy regresji (rys. 3-8.3) stwierdzono, że unormowana funkcja wyboczenia $\overline v_{cr} (x)$ układa się w sinusoidę
$\overline v_{cr}= \sin { \left( \cfrac {\pi \cdot x}{L}\right ) }$,
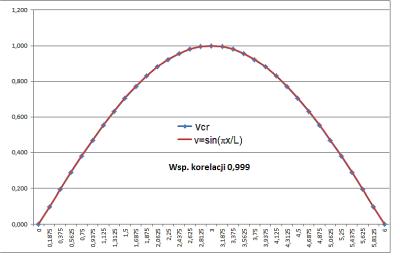
Rys. 3-8.3 Dopasowanie krzywej analitycznej metodą analizy regresji
Po dwukrotnym różniczkowaniu względem x, otrzymujemy
$\overline v_{cr}^” = {\cfrac{ \pi}{L}}^2 \cdot \sin { ( \cfrac {\pi \cdot x}{L})} \quad \stackrel{x=3 \, m}{=} {\cfrac{ \pi}{6}}^2 \cdot \sin { ( \cfrac {\pi \cdot 3}{6})}=0,2742$
Metoda różnic skończonych
Przybliżenie drugiej pochodnej linii postaci własnej z różnic centralnych oszacowane ze wzorów ($\ref{3-8.13}$) dla:
linii $v$ ugięcia bezwzględnego: $v_{cr}^” \approx \cfrac{22,512-2 \cdot 25,622+22,512}{0,1875^2}=- 6,258 \, mm /m^2$
linii $\overline v $ ugięcia unormowanego: $\overline v_{cr}^”\approx \cfrac{0,9951-2\cdot 1,0000+0,9951}{0,1875^2}=- 0,2766 \, 1/m^2$
Z aproksymacji ($\ref{3-8.16}$) dla linii $\varphi_z $ kątów obrotu mamy:
$ \overline v_{cr}^{„}= \varphi_z^{’} \cdot / v_{cr,max} \approx \cfrac{ 0,00117- (-0,00117)} {2 \cdot 0,1875 \cdot (22,62/1000)} = 0,2716 \, 1/m^2$
Obserwuje się niewielkie rozbieżności wartości krzywizny $v”$ szacowanej różnymi metodami., co jest skutkiem operowania małymi wartościami przy skończonej dokładności metod.
Przybliżenie drugiej pochodnej deplanacji $\varphi_x$ wynosi:
$ varphi_{x,cr}^”\approx \cfrac{0,393-2*0,395+0,393}{0,1875^2}=-0,1138 \, 1/m^2$
Lokalizacja przekroju sprawczego
W kol. (18) oraz (19) podano niezerowe składowe odkształcenia przekroju ($\ref{3-8.11}$):
$\varepsilon_{M_z} $= v” \cdot y_{max}= -6,258 \cdot (13\cdot 10) \cdot 10^{-6}= – 0,8135 \cdot 10(-3) = 0,8135 ‰$
$$\varepsilon_B= \varphi_x” \cdot \omega_max= -0,1138 \cdot (154 \cdot 10^{-4} = – 1,7525 ‰ $.
Z porównania tych odkształceń, wynika, że przeważająca formą wyboczenia jest wyboczenie skrętne, związane z deplanacją przekroju i działaniem bimomentu.
W kol. (21) sumę tych składowych, czyli odkształcenie zupełne ($\ref{3-8.12}$)
$\varepsilon_{tot}= -0,8135- 1,7525=2,565 ‰$
W kol. (22) zestawiono wartości mnożnika sił przekrojowych $\Lambda_{cr,tot}$ obliczonego ze wzoru ($\ref{3-8.9}$) dla $\beta_m= 1,017 \cdot 10^{-3}$ zgodnie z ($\ref{3-8.10}$).
Z kryterium lokalizacji przekroju sprawczego ($\ref{3-8.17}$), czyli kryterium minimum mnożnika krytycznego sił przekrojowych ustalamy, że
przekrój sprawczy „m” ma rzędną dla wartości
$\Lambda_{cr,tot}= \cfrac{1,017 \cdot 10^{-3}}{2,566\cdot 10^{-3}}= 0,3965$ dla $x_m= 3,0 m$.
Sprowadzona funkcja wyboczenia pręta
Złożony kształt funkcji wyboczenia sprowadzamy do wyboczenia giętnego z płaszczyzny, czyli
$\eta_{max}=y_{max}= 13 \, cm$
$EI(x)= EI_z=210 \cdot 10^{6} \cdot 3670 \cdot 10^{-8}=7707 \, kN/m^2$
Sprowadzona krzywizna
($\ref{3-8.19}$)$ \to$ $ \eta”_{cr}= \cfrac {2,566 \cdot 10^{-3}}{13 \cdot 10^{-2}}=19,736 \cdot 10^{-3} \, ‰/m $
Sprowadzony moment krytyczny
($\ref{3-8.20}$) $\to$ $M_{\eta,cr}(x_m)= – 7707 \cdot 19,736 \cdot 10^{-3}= -152,11 kNm$
Mimośród nośności
W niniejszym przykładzie siła $N_{Ed}$ jest taka sama we wszystkich przekrojach i wynosi
$N_{Ed}= 500 \, kN$.
Wobec tego dla wszystkich przekrojów takie same będą:
- krytyczna siła osiowa:
($\ref{3-8.24}$) $\to N_{cr}(x)= 3,92 \cdot 500 = 1960 \, kN$
- nośności przekrojów
($\ref{3-8.5}$) i ($\ref{3-8.6}$) $\to$
$N_{Rk}= 86,8 \cdot 235\cdot 10^{-1}= 2039,8 \, kN$
$M_{y, Rk} = 836 \cdot 235 \cdot 10^{-3} = 196,46 \, kNm$
$M_{z, Rk} = 282 \cdot 235 \cdot 10^{-3} = 66,27 \, kNm$
$M_{\omega, Rk} = 3350 \cdot 235 \cdot 10^{-5} =7,87 \, kNm^2$
- smukłość układu
($\ref{3-8.30}$) $\to$ $\overline \lambda= \sqrt{\cfrac{2039,8}{1760}}= 1,020$
- smukłość progowa
(1-3.2) $to$ $\overline \lambda_0 = 0,2$
- pomocniczy współczynnik wyboczeniowy
(1-3.4) $\to$ $\Phi=1/2\cdot[ 1+0,49\cdot (1,020-0,2)+1,020^2] =1,221$
(1-3.3) $\to$ $\chi=\cfrac{1}{1,221+\sqrt{1,221^2-1,020^2}}=0,528$
Współczynnik bezpieczeństwa dla mimośrodu nośności
($\ref {3-8.28}$) $\to$ $k_\chi= 0,528 ^{1,020 ^2 } = 0,515$,
($\ref {3-8.29}$) $\to$ $k_{\chi,d}= \cfrac {0,515} {1,1} =0,468$,
$\ref {3-8.27}$) $\to$ $\gamma_{e0} =\cfrac {1-0,515} {1-0,468} = 0,912$.
- Mimośród nośności
($\ref {3-8.26}$) $\to$ $e_{0, k}= 0,49 \cdot ( 1,020 – 0,2 ) \cdot \cfrac{66,27}{2039,8} =0,013$
($\ref {3-8.26}$) $\to$ $e_{0,d}=\cfrac{0,013} {0,912} =0,014$.
Amplituda imperfekcji
($\ref {3-8.23}$) $\to$ $A_m = 0,014 \cdot \cfrac {1960} {-152,1}=0,1878 m
Przykład 3-8.2 [
Przykład 3-8.3 [Łuk]
Przykład zgodny z [8]
Dla parabolicznego łuku pokazanego na rys. 3-8.30 wyznaczyć wytężenie metodą AIM i porównać z klasyczną metodą wyboczeniową.
Dane:
Łuk: $L = 40 \,m$; $f = 8 \,m$ ; $L_{real} = 43,93 \,m$;
Obciążenie: $gEd_1 = 48 \, kN/m$; $gEd_2 = 36 \,kN/m$;
Materiał: $f_y = \, 275 MPa$; $\gamma_{M1} = 1,1$; $E = 210 \,GPa$;
Przekrój: A = 0,03 \, m^2$; $I_y = 1,2186 · 10^{-3} \, m^4$; $W_{el,y} = 5,0775 · 10^{-3} m^3$; $a_y = 0,49$;
klasa 3; ie jest podatny na zwichrzenie.
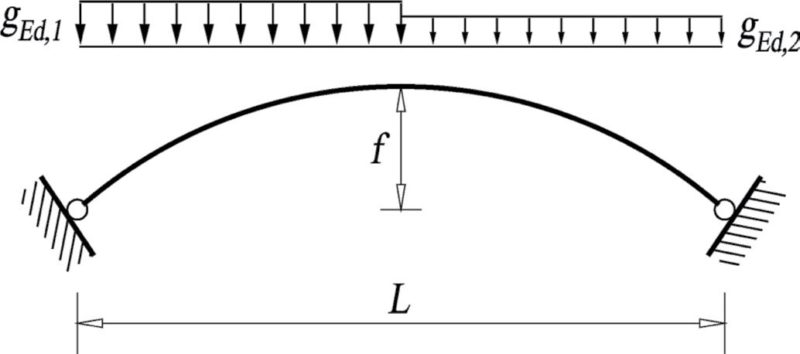
Rys. 3-8.30. Łuk do przykładu 3-8.312
Siły przekrojowe oraz kształt wyboczenia
Z rozwiązania metodą elementów skończonych uzyskano:
maksymalna siła osiowa I rzędu: $N_{Ed,max}= 1373,35 \, kN$, II rzędu $N_{Ed,max}= 1373,62 \, kN$
Z analizy LBA uzyskano kształt wyboczenia łuku, przedstawiony na rys. 3-8-2
$ \overline \eta_{cr}=sin(\cfrac{\pi \cdot x}{L})$
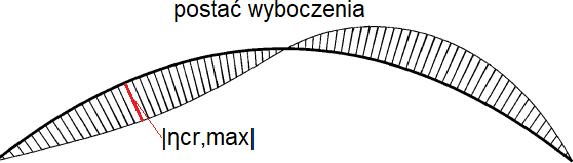
Rys. 3-8.31 Postać wyboczona łuku z przykładu 3-8.312
⇒ [[następne] [ Podsumowanie. Imperfekcje w normach światowych]
Niniejszy artykuł jest częścią 7 rozdziału 3 podręcznika Imperfekcyjna metoda projektowania konstrukcji
Publikacja internetowa w wersji „free” z nieograniczonym prawem cytatu – z powołaniem się na autora i źródło:
Leszek Chodor, (2019), Imperfekcyjna metoda projektowania konstrukcji, Encyklopedia πWiki,
[ https://chodor-projekt.net/encyclopedia/imperfekcyjna-metoda-projektowania-konstrukcji/ ]
Historia edycji:
(2019-04-19, 30) Wersja 1.0
Proszę społeczność Inżynierów w internecie o przesyłanie recenzji podręcznika na adres wydawnictwa biuro@chodor-projekt.net
Leszek ChodorLiteratura
- PN-EN 1993-1-1+A1:2006, Eurokod 3. Projektowanie konstrukcji stalowych, Część 1-1: Reguły ogólne i reguły dla budynków
- Balaz I., Kolekova Y. (2012), Structures with UGLI imperfections (in Slo-vak). Proceedings 18th International Conference Engineering Mechanics, pp. 61–86, Svratka – Bratislava, Czech Republic
- Sedlacek G., Eisel H., Hensen W., Kühn B., Paschen M. (2004). Leitfaden zum Fachbericht DIN 103. Stahlbrücken. Ernst & Sohn, A Wiley
- Consteel Software, (2019), ConSteel 13 Manual, [ https://consteelsoftware.com/downloads/ ]
- PN-EN 1999-1-1:2010, Eurokod 9: Projektowanie konstrukcji aluminiowych, Część 1-1: Reguły ogólne
- Chladny E., Stujberova M. (2013). Frames with unique global and local imperfection in the shape of the elastic buckling mode.Part 1. Stahlbau, 82(8), 609–617
- Hajdu G., Papp F., Achim R. (2017). Vollständige äquivalente Imperfektionsmethode für biege- und druckbeanspruchte Stahlträger. Stahlbau, 86(6), 483–495
- Dallemule M. (2015). Equivalent imperfections in arched structures. Slovak Journal of Civil Engineering, 23(3), 9–15
________________________________



