Wybrane formuły matematyczne
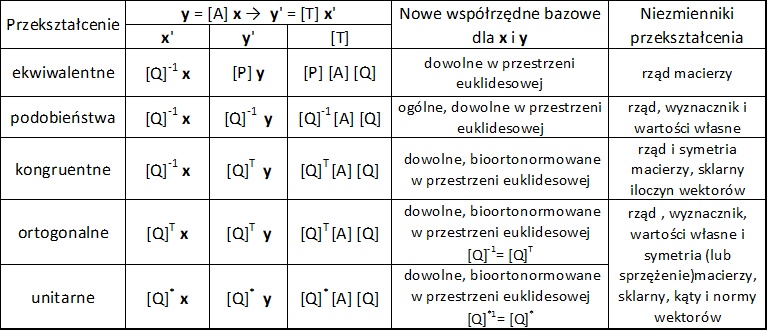
Artykuł w ciągu ostatnich 24 godzin czytało Czytelników Uwagi i recenzje podręcznika przesyłać na adres wydawnictwa: wydawnictwo@chodor-projekt.net lub leszek.chodor@chodor-pojekt.pl Podręcznik Imperfekcyjna metoda projektowania konstrukcji [ → Spis treści ] Dodatek A : Wybrane formuły matematyczne Dodatek A zawiera materiał dotyczący wybranych zagadnień algebry macierzy, rozwinięcia funkcji wektorowej w szereg Taylora, elementów teorii prawdopodobieństwa i statystyki, charakterystyk wektorów i pół losowych oraz procesów stochastycznych w zakresie umożliwiającym lekturę podręcznika. Opracowano na podstawie podręczników [1], [2], [3]– dodatki, [4], [5], [6]. Spis treści ukryj 1 Wybrane zagadnienia algebry macierzy 1.1 Podstawowe definicje i tożsamości 1.2 Rozwiązywanie równań macierzowych 1.3 Wybrane działania nad podmacierzami (blokami) 1.4 Przekształcenia macierzowe w teorii niezawodności 1.5 Różniczkowanie macierzy 2 Rozwinięcie funkcji wektorowej w szereg Taylora 3 Wybrane elementy teorii prawdopodobieństwa i statystyki 3.1 Podstawowe zmienne, funkcje losowe i ciągłe rozkłady prawdopodobieństwa 3.2 Charakterystyki wektorów losowych 3.3 Transformacja dowolnego wektora losowego na wektor o nieskorelowanych współrzędnych 3.3.1 Przykład 1. [Dekorelacja wektora losowego] 3.4 Funkcje wielkości losowych 3.4.1 Przykład 2. [Dystrybuanta ilorazu zmiennych losowych ] 4 Pola losowe i procesy stochastyczne 4.1 Klasyfikacja pól losowych 4.1.1 Przykład 3. [Przykłady wektorowych pól losowych] 4.2 Wartość oczekiwana i wariancja pola losowego 4.3 Procesy stochastyczne Wybrane zagadnienia algebry macierzy Rozważmy macierz $$ begin{equation} [A]=[a_{ij} ]_{(n times m)} = left[ begin{array}{cccc} a_{11} & a_{12} & cdots & a_{1n} \ vdots& vdots& vdots& vdots& \ a_{m1} & a_{m2} & cdots & a_{mn} end{array} right ] _{(n times m) }label {1} end{equation}$$ oraz $[B]=[b_{ij} ] _{(p times q)}$ Macierz $[a_{11}, ldots, a_{mn}]$ dla której, zerowe są wszystkie elementy leżące poza przekątną nazywa się diagonalną $diag [d_1=a_{11},dots, d_r=a_{mn}]$. Macierz dla której zerowe są wszystkie elementy leżące poniżej lub powyżej przekątnej nazywa się górną trójkątną i odpowiednio dolną trójkątną. Podstawowe definicje i tożsamości Iloczyn zwykły $[C]=[c_{ij}]_{(m times q)} $ macierzy $[A]_{(n times m)}$ i $[B]_{( p times q)}$ otrzymuje się w wyniku mnożenia kolumn x wiersze: $$ begin{equation} c_{ij}= sum limits_{k=1}^n a_{ik} cdot b_{kj} , quad (i=1,2,ldots, m , ; , j=1,2,dots q) label {2} end{equation}$$ przy czym liczba wierszy pierwszej macierzy musi być równa liczbie kolumn drugiej macierzy n=q. Przy mnożeniu macierzy prostokątnych należy zachować kolejność mnożenia , czyli w ogólności $[A] cdot[B] neq [B]cdot [A]$. Iloczynem prostym (tensorowym, Kronekera) $[C]=[A]otimes [B]$nazywamy macierz o rozmiarze ( (mp)x(nq)) z elementami $$ begin{equation} c_{ij}= a_{ik} cdot [B] label {3} end{equation}$$ Jeśli istnieją zwykłe iloczyny $[A]cdot[C]$ oraz $[B]cdot [D]$, to zachodzi $$ begin{equation} ([A]otimes[B] cdot ([C] otimes ]D]) = [A]cdot]C] otimes [B]cdot [D] label {4} end{equation}$$ Wyznacznik macierzy $det [A] =|A|$ został zdefiniowany w związku z rozwiązywaniem układów równań liniowych oraz analizą własności macierzy, w szczególności badaniem jej punktów osobliwych, co na przykład w teorii katastrof i stateczności oznacza punkt niestateczny układu. Kwadratowa (n=m) macierz [A] nazywa się osobliwą jeżeli $|A| =0$ Wyznacznik iloczynu macierzy ma następujące własności: $$ begin{equation} |AB| =|A| cdot |B| , quad |A otimes B| =A^{r1} cdot B^{r2} label {5} end{equation}$$ gdzie: r1, r2 rozmiar macierzy [A] i [B] odpowiednio Macierz transponowana $[A]^T$ powstaje poprzez przestawienie macierzy i kolumn macierzy $[A]$ $$ begin{equation} [a_{ij}]^T_{mtimes n} = [a_{ji}]_{n times m} label {6} end{equation}$$ Jeśli dla kwadratowej macierzy $[A]=[A]^T$, to ta macierz jest symetryczna. Jeśli $[A]= – [A]^T$, to macierz jest skośnosymetryczna (antysymetryczna). Macierz sprzężona (stowarzyszona, sprzężona hermitowsko) $[A]^*$ jest uogólnieniem macierzy transponowanej na przypadek macierzy z elementami w dziedzinie liczb zespolonych $$ begin{equation} [A]^* = [a_{ij}]^*_{mtimes n} = [ overline a_{ji}]_{n times m} label {7} end{equation}$$ gdzie liczbę sprzężoną z liczbą zespoloną $a=x + i cdot z$ (i-jednostka urojona) oznaczono przez $ overline a = x – i cdot z$. Jeśli dla kwadratowej macierzy $[A]= [A]^*$ , to macierz jest hermitowska (samosprzężona), a przy $[A]=-[A]^* $ jest skośnohermitowska. Ślad macierzy jest to suma elementów diagonalnych $$ begin{equation} tr[A] = sum limits_{i=1}^n a_{ii} label {8} end{equation}$$ Macierz odwrotna $[A]^{-1}$ odgrywa ważną rolę w algebrze macierzy i może być zdefiniowana jako $$ begin{equation} [A]^{-1} cdot [A] =1 label {9} end{equation}$$ Macierz odwrotna istnieje tylko dla macierzy nieosobliwej. Jeśli istnieje $[A]^{-1}$ i $[B]^{-1}$ , to zachodzi: $$ begin{equation} (AB)^{-1}= [B]^{-1} [A]^{-1} , quad ( A otimes B)^{-1} = [A]^{-1} otimes [B]^{-1} label {10} end{equation}$$ $$ begin{equation} ([A]^{-1})^T=([A]^{T})^{-1} , quad ([A]^{-1})^*=([A]^{*})^{T}label {11} end{equation}$$ $$ begin{equation} [A]^{-1})^{-1} =[A] label {12} end{equation}$$ $$ begin{equation} |[A]^{-1}| =cfrac{1}{|A|} label {13} end{equation}$$ $$ begin{equation} diag [d_1, ldots, d_r]^{-1} = diag [cfrac{1}{d_1}, dots , cfrac{1}{d_r}] label {14} end{equation}$$ Jeśli dla kwadratowej macierzy $[A]$ zachodzi $[A]^T [A]=[A] [A]^T$ , czyli $[A]^T=A^{-1}$, to macierz nazywa się ortogonalną, a jeśli $[A]^* [A]=[A] [A]^*$, czyli $[A]^*=[A]$, to macierz nazywa się unitarną. Rozwiązywanie równań macierzowych Poniżej w tekście artykułu małymi literami w nawiasach (np. [x] i [b]) oznaczane są wektory. Podczas rozwiązywania równań macierzowych stosuje się technikę mnożenia stron równania prawostronnie lub lewostronnie. Każde z równań liniowych $$ begin{equation} [A] [x]=[b] quad text {oraz } [x] [A]=b label {15} end{equation}$$ gdzie: $[x]$ – wektor niewiadomych $[A]$ – macierz nieosobliwa ( $|A| neq 0$), $[b]$ – wektor wyrazów wolnych ma jedno i tylko jedno rozwiązanie $$ begin{equation} [x]=[A]^{-1} [b] quad text {oraz } [x] = [b] [A]^{-1} quad text {odpowiednio} label {16} end{equation}$$ przy czym (porządek mnożenia musi być zachowany. Wybrane działania nad podmacierzami (blokami) Rozważmy kwadratową macierz $$ begin{equation} [A]= left[ begin{array}{cc} [A]_{11} & [A]_{12} \ [A]_{24} & [A]_{25} end{array} right ] _{(n times n) } label {17} end{equation}$$ Macierz odwrotną można obliczyć w następujący sposób: $$ begin{equation} [A]^{-1}= left[ begin{array}{cc} [A]_{11}^{-1}+ [A]_{11}^{-1} [A]_{12} [B]^{-1} [A]_{22} [A]_{11}^{-1} & – [A]_{11}^{-1}[A]_{12} [B]^{-1} \ -[B]^{-1} [A]_{22} [A]_{11}^{-1} & [B]^{-1} end{array} right ] _{(n times n) } label {18} end{equation}$$ gdzie: $[B]_{(n/2 times n/2)} = [A]_{23} – [A]_{22} A_{11}^{-1} [A]_{12}$ Użyteczną tożsamością macierzową jest $$ begin{equation} left[ [A]_{11} -[A]_{12} [A]_{23}^{-1} [A]_{22} right]^{-1} =[A]_{11}^{-1}+[A]_{11}^{-1}[A]_{12} [[A]_{23} -[A]_{22} [A]_{11}^{-1}[A]_{12}]^{-1} [A]_{22} [A]_{11}^{-1}label {19} end{equation}$$ Więcej o tożsamości ( $ref{19}$) w pracy [7]. Ważną tożsamością „wyznacznikową” jest: $$ begin{equation} |A| =| [A]_{11}- [A]_{12} [A]_{23}^{-1} [A]_{22}] | cdot | [A]_{23}| label {20} end{equation}$$ oraz $$ begin{equation} tr [A] = tr [A]_{11}+tr [A]_{23}label {21} end{equation}$$ Przekształcenia macierzowe w teorii niezawodności W teorii niezawodności, występują przekształcenia macierzowe, które są przypadkami szczególnymi ogólnych typów przekształceń macierzowych, zestawionych w tab.1. W tabeli tej zestawiono […]
leszekchodor