Plastyczna interakcja ściskania i dwuosiowego zginania
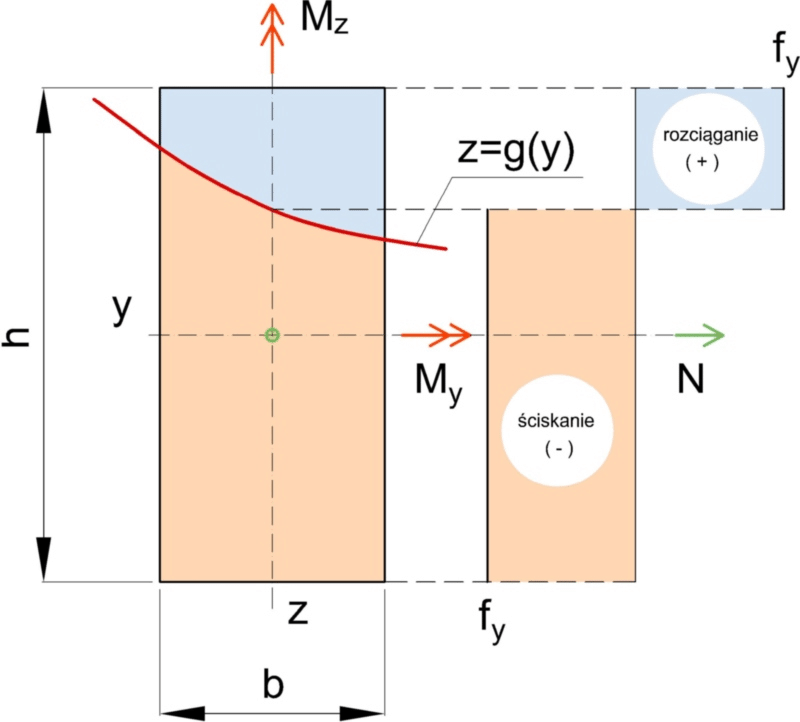
Analiza plastyczna przekrojów prętów stalowych w złożonym stanie naprężenia jest obecnie powszechnie wykorzystywana w związku z zaleceniami norm Eurokod, a zwłaszcza [1] i [2]. Z problemem wyznaczenia wysokości strefy ściskanej oraz położeniem osi obojętnej w granicznym stanie plastycznym przekrojów obciążonych jednoczesnym ściskaniem i dwukierunkowym zginaniem spotykamy się już przy wyznaczeniu klasy przekroju stalowego. W niniejszym artykule omówimy problem na użytek wyznaczania klasy dwuteowego przekroju stalowego poprzez adaptację klasycznych wyników uzyskanych przez [3]. W niniejszym artykule przedstawimy rozwiązania wynikające z podejścia statycznego do zadania teorii nośności granicznej (plastycznej), to znaczy uzyskane rozwiązania stanowią oszacowania rozwiązania od góry . Uzyskane wyniki są wystarczająco dokładne w praktyce inżynierskiej. W pracy [3] zaprezentowano oszacowania od dołu, wynikające z podejścia kinematycznego. Na wielu przykładach wykazano, że z podejścia statycznego najczęściej uzyskuje się rozwiązanie identyczne do rozwiązań kinematycznych, a w skrajnych przypadkach różniące się o max 1%. Elementarny przekrój prostokątny Przed rozwiązaniem zadania dla przekroju dwuteowego przedstawimy elementarne rozwiązanie dla przekroju prostokątnego. Na rys.1. pokazano przekrój prostokątny z hipotetyczną osią obojętną o równaniu z=g(y). Oś obojętna oddziela część rozciąganą przekroju (+)) od części ściskanej (-). Rys.1 Hipotetyczna oś obojętna g(y) przekroju prostokątnego hxb w stanie plastycznym. fy – granica plastyczności Załóżmy, że na przekrój działa siła osiowa N oraz momenty zginające My oraz Mz. Siły przekrojowe są znakowane zgodnie z zasadami mechaniki , więc są dodatnie jeśli ich wektory działąją zgodnie ze zwrotem osi współrzędnych. W praktyce oznacza to, że są dodatnie, jeśli wywołują naprężenia rozciągające w pierwszym kwadrancie układu współrzędnych (y-z). Zwracamy uwagę, że w EC3 [1], przyjęto, że dodatnie są naprężenia ściskające, a nie rozciągające. Założona na rys.1. bryła naprężeń daje następujące siły przekrojowe [3]: $ N=- int limits_{-b/2}^{+b/2} 2 cdot f_y cdot g(y) dy$ (1) $ M_y= int limits_{-b/2}^{+b/2} [ dfrac {h^2} {4}-g^2(y)] cdot f_ydy$ (2) $ M_z= int limits_{-b/2}^{+b/2} 2 cdot f_y cdot y,cdot g(y)dy$ (3) gdzie g(y) jest jeszcze nieznaną funkcją. Problem poszukiwania osi obojętnej – funkcji g(y), rozwiążemy w taki sposób, że znajdziemy maksymalną wartość My możliwą przy ustalonych pozostałych siłach przekrojowych: N, Mz. Przeprowadzimy ekstremalizację funkcjonału $int F dA$, gdzie: $F= 2 cdot f_y cdot left[ 1/2 cdot [dfrac {h^2} {4}-g^2(y)] -lambda_1 cdot y cdot g(y)-lambda_2 cdot g(y)right]$ (4) λ1 i λ2 są z mnożnikami Lagrange’a poszukiwanymi zadania. Równanie Eulera stowarzyszone z funkcjonałem $int F dA$ można zapisać w postaci $ dfrac{partial F}{partial g(y)}-dfrac{d}{dy} cdot dfrac {partial F} {partial g^{’}(y)} =0$ (5) skąd wynika: $ g(y)= – lambda_1 cdot y- lambda_2 $ (6) czyli że oś obojętna jest linią prostą o współczynniku kierunkowym λ1=tg θ, gdzie θ jest kątem nachylenia osi obojętnej do osi głównej y-y oraz współczynniku translacyjnym λ1=zN, który jest przesunięciem osi obojętnej przekroju w stosunku do osi y-y. Po wykonaniu przypisanych całkowań siły przekrojowe można zapisać w postaci: $ N= 2 cdot f_y cdot b cdot lambda_2$ (7) $ M_y= 2 cdot f_y cdot left [ dfrac {bh^2} {8}- dfrac {lambda_1^2}{3} cdot left (dfrac {b}{2} right)^3- lambda_2^2 cdot dfrac{b}{2}right ]$ (8) $M_z= dfrac {1} {6} cdot f_y cdot b^3 cdot lambda_1$ (9) Po wyeliminowaniu z tych równań mnożników λ1 i λ2, otrzymamy proste równanie interakcji sił przekrojowych: $n^2+m_y+ dfrac {3}{4}m_z^2=1$ (10) ważne dla: $m_z le dfrac {2}{3}(1-n) le m_y$ (11) gdzie względne siły przekrojowe wynoszą: $n=N/N_{pl} , m_y=M_y/M_{y,pl} , m_z= M_z /M_{z.pl}$ , a nośności plastyczne przekroju: $N_{pl}=A cdot f_y , M_{y,pl}=W_{y.pl}cdot f_y , M_{z,pl}=W_{z,pl} cdot f_y$ ; $A=b cdot h , W_{y.pl}= dfrac {b cdot h^2}{4} , W_{z.pl}= dfrac{hcdot b^2}{4}$ . Przy znajomości sił przekrojowych z powyższych równań możemy wyznaczyć mnożniki Lagrange’a: $lambda_1=(tgtheta)= dfrac { 6 M_Z} {f_y cdot b^3} $ (12) $lambda_2=(z_N)= dfrac {N} {2 cdot f_y cdot b} $ (13) co pozwala wyznaczyć położenie osi obojętnej. W zależności od wzajemnych stosunków sił przekrojowych można ustalić, zestawione w tab.1. sytuacje o różnym układzie osi obojętnej oraz różnych równaniach interakcji. Tab.1. Położenie osi obojętnej i krzywe interakcji dla przekroju prostokątnego (opracowano na podstawie [3]) Przekrój dwuteowy Na rys.2. pokazano przekrój dwuteowy z hipotetyczną, dowolną osią obojętną o równaniu z=g(y). Rys.2 Hipotetyczna oś obojętna przekroju dwuteowego w stanie plastycznym. fy – granica plastyczności Postępując podobnie jak w w pkt 1. można pokazać, że hipotetycznie założona oś obojętna g(y) musi być linią prostą o równaniu $z=g(x)= -cdfrac {y}{lambda_3}-z_N$ (14) gdzie $z_N= dfrac {lambda_4} {lambda_3}$ (15) Mnożniki Lagrange’a zależą od relacji wartości sił przekrojowych. Siły te można zapisać w postaci: $N=f_y cdot z_N cdot [ 4cdot t_fcdotlambda_3 +2cdot t_w]$ (16) $M_y= dfrac {4} {3} cdot f_y cdot [(h/2)^3-(h/2-t_f)^3] cdot lambda_3+f_y cdot [(h/2-t_f)^2- z_N^2]$ (17) $M_z=2 cdot f_y cdot left[ b^2/4 cdot t_f – lambda_3^2/3 cdot [ h^2/8 – (h/2-t_f)^3]-( lambda_3 cdot z_N)^2 cdot t_f right]$ (18) Znając wartości sił przekrojowych z tego układu równań można wyznaczyć mnożniki Lagrange’a, a następnie położenie osi obojętnej oraz równania interakcji. Rys.3 Prostoliniowa oś obojętna przekroju dwuteowego w stanie plastycznym w złożonym stanie naprężenia. Po wyeliminowaniu z tych równań mnożników λ1 , λ2, λ3 i λ4 otrzymamy proste równania interakcji sił przekrojowych: $n=dfrac {z_N}{A}[2 cdot t_f cdot lambda_3 + t_w ]$ (19) $m_y=dfrac {1}{W_{pl,y}} left { dfrac {4}{3} left [h^3/8 – (h/2 -t_f)^3)] cdot lambda_3 + t_w cdot[(h/2-t_f)^2-y_N^2] right ]right }$ (20) $m_z=dfrac {2}{W_{pl,z}} left{ [b^2/4 cdot t_f -dfrac {1}{3}[(h/2)^3 -(h/2 -t_f)^3)] cdot lambda_3^2- t_fcdot (lambda_3 cdot z_N)^2 right } $ (21) ważne dla: $0 le z_N le h/2-t_f$ (22) $dfrac {t_w/2}{z_n+h/2-t_f} le lambda_3 leq dfrac {h/2}{d/2+z_N}$ (23) gdzie względne siły przekrojowe wynoszą: $n=dfrac{N}{N_{pl}}$ , $m_y= dfrac{M_y}{M_{y.pl}}$, $m_z= dfrac{M_z}{M_{z.pl}}$, a nośności plastyczne przekroju: wynoszą $N_{pl}=A cdot f_y , M_{y,pl}=W_{y.pl}cdot f_y , M_{z,pl}=W_{z,pl} cdot f_y$ (24) $A=b cdot h , W_{y.pl}=b cdot t_f cdot (h-t_f)+t_w cdot (h/2-t_f)^2 , W_{z.pl}=dfrac {t_f cdot b^2}{2}+dfrac {t_w^2 cdot(h-2 cdot t_f)}{4}$ (25) Przy znajomości sił przekrojowych z powyższych równań możemy wyznaczyć mnożniki Lagrange’a i położenie osi obojętnej. W zależności od wzajemnych stosunków sił przekrojowych można ustalić, zestawione w tab. 2 osiem sytuacji o różnym układzie osi obojętnej oraz różnych równaniach interakcji. Parametry linii osi obojętnej: zN, Θ=arctg λ3 wyznacza się z nieliniowego układu równań interakcji. Tab.2. Położenie osi obojętnej i krzywe interakcji dla przekroju dwuteowego (opracowano na podstawie [3]) Przykład rachunkowy Określić położenie osi obojętnej oraz […]
leszekchodor