Pręty wielogałęziowe, quasi-zamknięte
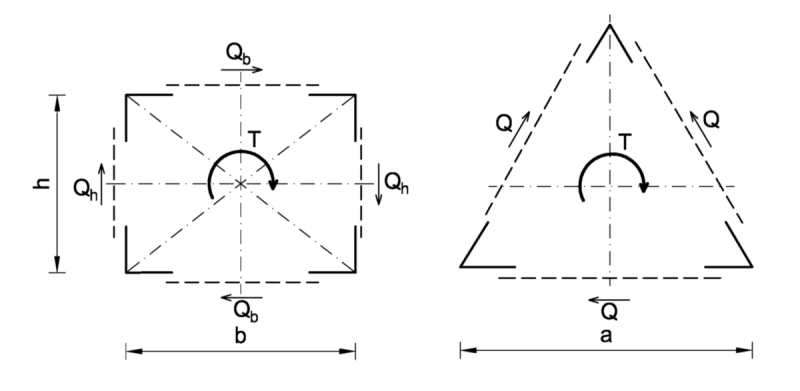
Pręty (kratownice) wielopasowe można przystosować do przenoszenia momentu skręcającego poprzez stosowny dobór zamykającego skratowania lub przewiązek. Przykładem skręcanych kratownic są galerie przenośnikowe, bramki nad autostradami lub słupy energetyczne. W ścianach takich kratownic powstają siły typowe dla swobodnego skręcania prętów o przekroju zamkniętym [1]. Na rys.1 pokazano najprostszy schemat pręta wielogałęziowego – kratownicy czteropasowej o przekroju prostokątnym hxb, skręcanego momentem skręcającym T, stałym po długości pręta. Na rys.2 pokazano cienkościenny przekrój quasi-zamknięty oraz przykłady prętów o dwu gałęziach, które mogą być łączone skratowaniem lub przewiązkami w sposób często stosowany przy konstruowaniu dwugałęziowych slupów. Przekrój pozornie zamknięty skratowaniem lub przewiązkami można zamodelować zastępczym przekrojem cienkościennym i zastosować analogię prętową. W ściance o grubości t zamkniętego przekroju cienkościennego, skręcanego momentem skręcającym T powstają równomiernie rozłożone po grubości ścianki naprężenie styczne $tau$, które można sprowadzić do wydatków (sił jednostkowych) $q=tau cdot t$. Zgodnie z teorią Bredta wydatki styczne od skręcania w ściankach przekroju zamkniętego są równe $q=frac{T}{Omega}$, gdzie $Omega$ jest podwojonym polem zawartym wewnątrz linii środkowej przekroju zamkniętego. Ponieważ przekrój zamknięty skratowaniem jest tylko quasi-zamknięty, więc siły w ściankach będą nieco mniejsze. Można wykazać [2], że będą one zmniejszone współczynnikiem $k_T=frac{overline I_T}{I_T+overline I_T}$ , gdzie $I_T$ jest momentem bezwładności skręcania przekroju otwartego (bez uwzględnienia zamykającego skratowania lub przewiązek) $I_T=frac{eta}{3}cdotsum limits _{(i)} h_i cdot t_i^3$ ($h_i$ i $t_i$ są długością i grubością i-tej ścianki przekroju, $(i)$ – (suma) po wszystkich ściankach przekroju, $eta$ – współczynnik uwzględniający wpływ wyokrąglenia i zmienne grubości ścianek półek wynosi: dla płaskich ścianek bez wyokrągleń oraz dla ścianek kątowników i profilów spawanych $eta=1,0$; dla ścianek dwuteowników $eta=( 1,2,do,1,3)$ średnio 1,25; dla ścianek ceowników i teowników $eta=1,12$. $overline I_T$ jest dodatkowym moment bezwładności swobodnego skręcania przekroju zależnym od sposobu zamknięcia przekroju pręta. Dla przypadku skratowania pokazanego na rys 2a (wykratowanie typu V bezsłupkowe) i rys 2b ( wykratowanie typu N ) odpowiednio, mamy [1]: $overline I_T=frac{E}{G}left ( frac{Omega}{b} right )^2 F_d sin^2alphacosalpha$, $overline I_T=frac{E}{G} cdot left ( frac{Omega}{b} right )^2 F_d frac{F_c sin^2{alpha} cdot cosalpha}{F_c+F_d sin^3alpha}$ a dla łączenia przewiązkami (rys 2c): $overline I_T=24frac{E}{G} cdot left ( frac{Omega}{b} right )^2 cdot frac{I_f}{a^2}left ( 1+2frac{b_1I_f}{aI_s}+28,8cdot frac{E}{G} frac{I_f}{ab_1F_s} right )^{-1}$ gdzie: $E, G$ – moduł Younga i moduł Kirchoffa materiału; $b,b_1$- prześwit i odległość osiowa między gałęziami pręta; $F_d,F_c,F_f$ – pole przekroju krzyżulca, słupka, pasa (gałęzi); $I_f$- moment bezwładności giętnej pojedynczej gałęzi ; $a$- odległość osiowa między przewiązkami lub węzłami skratowania. [1] W rezultacie wydatki styczne w ściankach bocznych pręta wynoszą $q=k_Tfrac{T}{Omega}$ , a poprzeczne siły działające na składowe kratownice płaskie są sumą wydatków zebranych z szerokości ścianki, czyli dla kratownic pionowych z rys. 1 (prawego i lewego boku) : $Q_h=q cdot h$ , a dla kratownic poziomych (płaszczyzny dolnej i górnej) $Q_b=q cdot b$. Do wstępnego wymiarowania prętów kratownic przestrzennych można pomijać zmniejszający wpływ wykratowania na siły wywołane skręcaniem i przyjmować $k_T=1$ , a wówczas w przypadku przekrojów pokazanych na rys. 3, mamy: dla kratownicy czteropasowej prostokątnej bxh: $Q_h=frac{T cdot h}{2bh}=frac{T} {2b}$, $Q_b=frac{T} {2h}$ dla kratownicy trójpasowej o przekroju trójkąta równobocznego o boku a: $Q=frac{2T}{a cdot sqrt{3}}$ Obciążenia poprzeczne Q są przyłożone do wydzielonej kratownicy płaskiej zgodnie z przebiegiem momentu skręcającego T(x) po długości pręta x. Siły w prętach kratownicy wyznacza poprzez rozwiązanie kratownic płaskich pod takim obciążeniem. Należy pamiętać o sumowaniu sił w pasach od poszczególnych kratownic składowych z uwzględnieniem kierunku obciążenia Q. Na przykład dla kratownicy, pokazanej na rys 1 mamy : kierunki obciążeń zewnętrznych Q: kratownica K1 (ściana prawa) – pionowo w dól, kratownica K2 (podłoga) – poziomo w lewą stronę, kratownica K3 (ściana lewa) – pionowo do góry, kratownica K4 (dach) – poziomo w prawą stronę, kierunki sił w pasach kratownic: K1: pas górny PG – ściskany, pas dolny PD – rozciągany, K2 pas prawy PP – ściskany, pas lewy PL – rozciągany, K3 pas dolny PD – ściskany, pas górny PG – rozciągany, K4 pas lewy PL – ściskany, pas prawy PP – rozciągany Sumaryczne siły N pas górny prawy – K1(PG)+K4(PP) pas dolny prawy – K1(PD)+ K2(PP) pas dolny lewy – K2(PL)+K3(PD) pas górny lewy – K3(PG)+K4(PL) Oznacza to, że w przypadku przekroju kwadratowego h=b siły osiowe w pasach będą zerowe, a całkowity moment skręcający przenosi wykratowanie ścian. Należy jeszcze wskazać, że kratownica przestrzenna, przenosząca skręcanie powinna być wykratowana na wszystkich płaszczyznach bocznych oraz powinna być wyposażona w poprzeczne przepony w miejscach przyłożenia momentów (w tym w zamocowaniu) oraz nie rzadziej niż co 8-me pole kratownicy. Do wyznaczania przemieszczeń kratownicy od wpływu skręcania należy uwzględniać współczynnik $k_T
leszekchodor